Clear Sky Science · es
Control periférico habilitado por sensado distribuido en un brazo robótico blando inspirado en el pulpo para agarre autónomo submarino
Por qué importa un brazo robótico flexible
Imagine un robot que pueda tantear con delicadeza alrededor de un arrecife de coral, recoger una concha frágil sin romperla o inspeccionar un edificio inundado sin derribar objetos. Para hacerlo de forma segura, las máquinas necesitan cuerpos suaves y sentidos distribuidos por esos cuerpos, como en los animales. Este estudio muestra cómo imitar la manera en que un brazo de pulpo siente y reacciona puede dotar a un robot submarino de ese tipo de tacto sutil.
Aprendiendo de un pulpo
Los brazos del pulpo son famosos por su gracia y destreza. Cada brazo contiene cientos de ventosas repletas de sensores táctiles y químicos, y gran parte de la toma de decisiones ocurre localmente en el brazo en lugar de en el cerebro central del animal. Cuando una ventosa detecta algo, puede desencadenar reflejos sencillos en el lugar mientras participa en movimientos coordinados de mayor escala. Los investigadores detrás de este trabajo se propusieron recrear esa combinación de estructura blanda, tacto rico y control local en un brazo robótico que pueda operar bajo el agua.
Construyendo un brazo blando con ventosas inteligentes
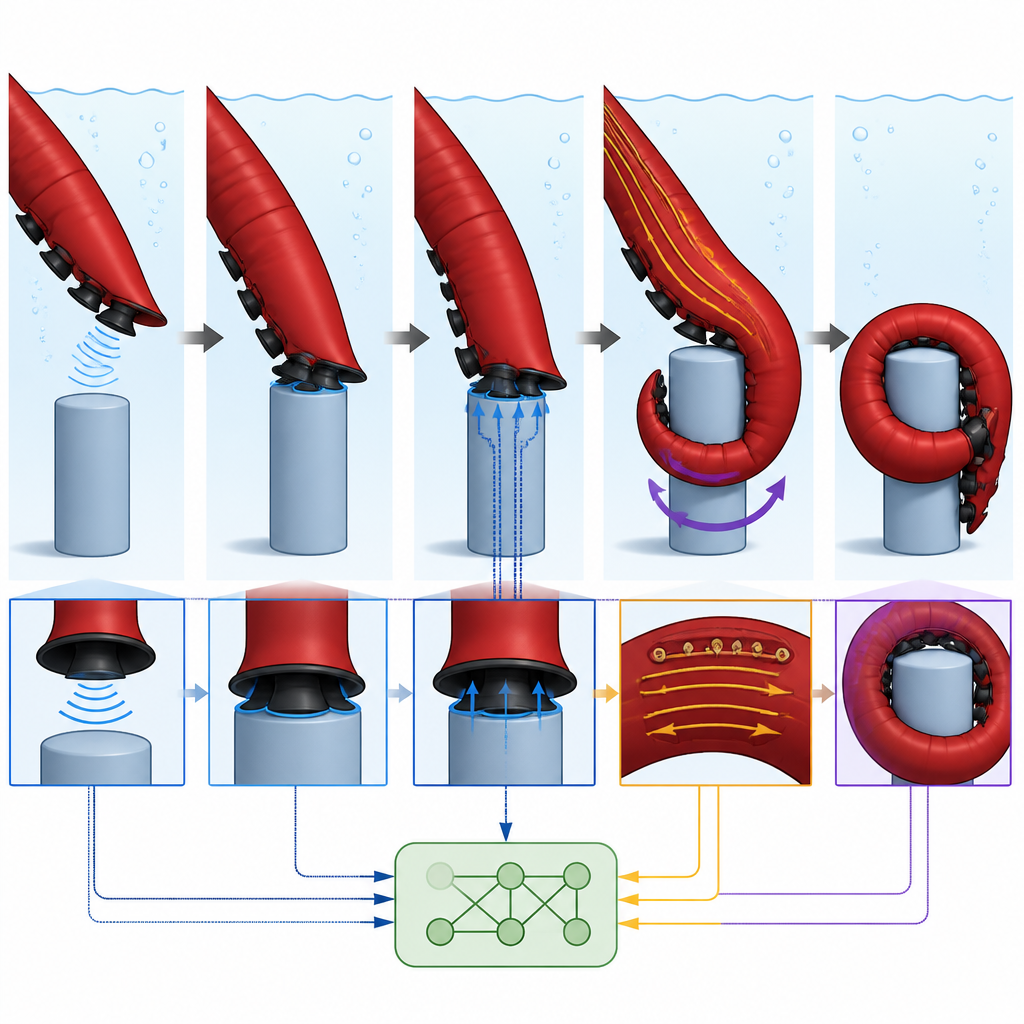
El equipo diseñó un brazo blando con forma cónica de unos cuarenta centímetros de largo, que se estrecha desde una base ancha hasta una punta fina, parecido a un brazo de pulpo pequeño. En su parte inferior colocaron diez ventosas artificiales que disminuyen de tamaño hacia la punta. Dentro de cada ventosa hay una pequeña placa electrónica con diodos emisores y detectores de luz integrados en un cuerpo de silicona blanda y coloreada. Cuando la silicona se deforma por el contacto, cambia el patrón de luz reflejada. A partir de estas señales ópticas, el sistema puede determinar si una ventosa está tocando algo, con qué fuerza presiona e incluso desde qué dirección proviene el contacto. Pruebas cuidadosas en aire y en agua mostraron que las ventosas responden de forma lineal a fuerzas en rangos suaves, funcionan de modo fiable durante miles de ciclos y pueden detectar la dirección del contacto con unos pocos grados de precisión para áreas de contacto pequeñas.

Permitir que el brazo decida en el borde
Para convertir este tacto en movimiento inteligente, los investigadores imitaron la forma en que el control está distribuido a lo largo de un brazo de pulpo. Cada ventosa tiene su propia electrónica local que actúa como un pequeño centro nervioso: tan pronto como una señal supera un umbral, esa ventosa puede activar la succión como reflejo, adhiriéndose a la superficie cercana. Al mismo tiempo, información simplificada sobre dónde y cómo se produjo el contacto se envía a una capa superior que desempeña el papel de un sistema nervioso periférico. Esta capa no ve los datos brutos de todos los sensores, sino solo resúmenes de la dirección del contacto de cada ventosa. Con esa imagen combinada, el sistema elige estrategias amplias como doblar el brazo hacia o en contra del cuerpo o torsionarlo alrededor de un objeto, y luego ordena a los tres tendones internos que dirigen el brazo.
Probando el tacto y el agarre bajo el agua
Los investigadores probaron el brazo en tanques de agua dulce parada, usando cilindros sencillos, cajitas pequeñas y formas irregulares como una estrella de juguete. En un conjunto de ensayos, el brazo quedaba inmóvil mientras se acercaban objetos a diferentes ángulos. Las ventosas informaron correctamente dónde ocurrió el contacto, y el sistema de control escogió movimientos acordes, como torsionar cuando un objeto yacía a lo largo del brazo o doblarse cuando estaba a un lado. En otras pruebas, el brazo barría lentamente el agua en movimientos de búsqueda hasta que sus ventosas detectaban algo, entonces se detenía, estimaba la postura del objeto y se envolvía alrededor. Las mismas señales de sensado incluso podían usarse para estimar el peso aparente de un objeto suspendido leyendo las fuerzas de tracción en una sola ventosa. En numerosos ensayos, el brazo consiguió aferrarse y levantar varios tipos de pequeños objetos submarinos sin supervisión externa.
Qué significa esto para futuros robots submarinos
Al combinar materiales blandos, sensores táctiles basados en luz y control local en capas, este brazo inspirado en el pulpo muestra cómo los robots pueden reaccionar a su entorno justo donde ocurre el contacto, en lugar de esperar a que un ordenador remoto decida. El trabajo sugiere que las futuras máquinas submarinas podrían explorar espacios desordenados, frágiles o poco conocidos con mayor seguridad, usando muchas pequeñas unidades de sensado y reflejo distribuidas a lo largo de sus cuerpos. Aunque este prototipo se probó sobre todo con objetivos modestos y de forma cilíndrica, el mismo diseño podría escalarse y ampliarse a más brazos y más ventosas, acercando a los robots un paso más a la fluidez natural de un pulpo en el mar.
Cita: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Palabras clave: robótica blanda, agarre submarino, diseño inspirado en pulpos, sensado táctil, manipulación autónoma