Clear Sky Science · tr
Oktopus ilhamlı yumuşak robotik kolda dağıtılmış algılamayla sağlanan çevresel kontrol ve otonom sualtı kavrama
Neden esnek bir robot kol önemli
Bir robotun mercan resifleri arasında nazikçe hissetmesini, kırılgan bir kabuğu kırmadan almasını veya su basmış bir binada eşyalara çarpmadan arama yapmasını hayal edin. Bunu güvenli biçimde yapabilmek için makinelerin hayvanlara benzer şekilde yumuşak bedenlere ve bu bedenlere yayılmış duyulara ihtiyacı var. Bu çalışma, bir oktopus kolunun hissetme ve tepki verme biçimini kopyalamanın sualtı bir robota bu tür ince dokunma yeteneği kazandırabileceğini gösteriyor.
Oktopustan öğrenmek
Oktopus kolları zerafet ve çeviklikleriyle ünlüdür. Her kol, dokunma ve kimyasal algılayıcılarla dolu yüzlerce vantuza sahiptir ve kararların büyük kısmı hayvanın merkezi beyninden çok kolun yerel yapılarında alınır. Bir vantuz bir şeyi hissettiğinde, aynı anda daha büyük, koordine hareketlerin parçası olurken yerde basit refleksleri tetikleyebilir. Bu çalışmanın araştırmacıları, su altında çalışabilen bir robotik kola bu yumuşak yapı, zengin dokunma ve yerel kontrol karışımını yeniden yaratmayı hedefledi.
Akıllı vantuzlu yumuşak bir kol inşa etmek
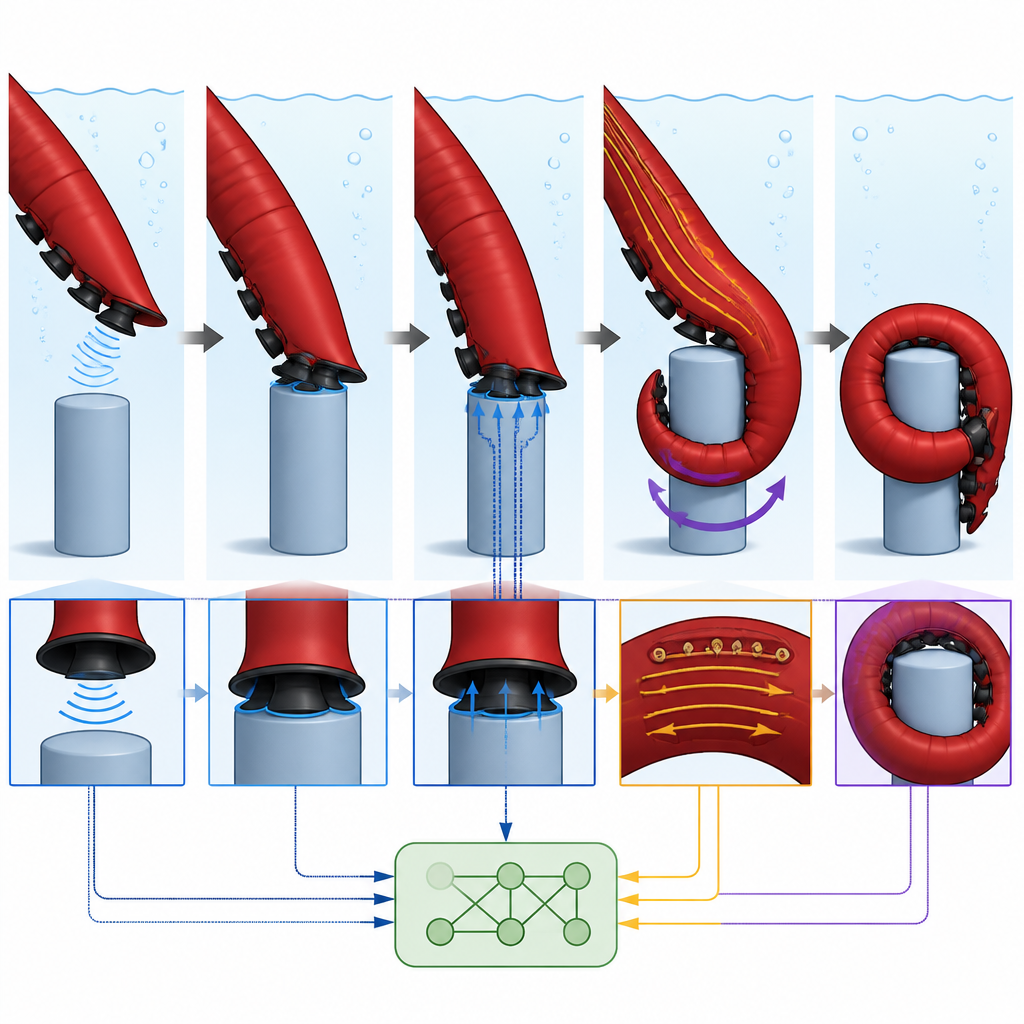
Ekip, tabandan ince bir uca doğru konik biçimde daralan, yaklaşık kırk santimetre uzunluğunda bir yumuşak kol tasarladı; küçük bir oktopus kolunu andırıyor. Alt yüzüne doğru uca doğru küçülen on yapay vantuz yerleştirdiler. Her vantuzun içinde, yumuşak, renkli bir silikon gövdeye gömülü ışık yayan diyotlar ve ışık sensörlerini taşıyan küçük bir elektronik kart bulunuyor. Silikon temas sırasında deformasyona uğradığında, yansıyan ışığın deseni değişiyor. Bu optik sinyallerden sistem, bir vantuzun bir şeye temas edip etmediğini, ne kadar bastığını ve hatta temasın hangi yönden geldiğini ayırt edebiliyor. Hava ve suda yapılan dikkatli testler, vantuzların hafif kuvvet aralıklarında kuvvete lineer yanıt verdiğini, binlerce döngü boyunca güvenilir çalıştığını ve küçük temas alanları için temas yönünü birkaç derece içinde algılayabildiğini gösterdi.

Kolda karar vermeyi uçta bırakmak
Bu dokunmayı akıllı harekete dönüştürmek için araştırmacılar, kontrolün oktopus kolu boyunca nasıl yayıldığını taklit ettiler. Her vantuzun kendi yerel elektroniği var; küçük bir sinir merkezi gibi çalışarak, bir sinyal belirli bir eşik aşıldığında o vantuz refleks olarak emmeyi açıp yakın yüzeyi kavrayabiliyor. Aynı zamanda, kontak noktasının nerede ve nasıl oluştuğuna dair basitleştirilmiş bilgiler, periferik sinir sistemi rolünü oynayan daha yüksek bir katmana gönderiliyor. Bu katman tüm sensörlerden gelen ham verileri görmüyor; sadece her vantuzdan gelen temas yönü özetlerini alıyor. Bu birleşik görünümü kullanarak, kolu bedene doğru veya bedenden uzak bükme ya da bir nesnenin etrafında dönme gibi geniş stratejiler seçiyor ve ardından kolu yönlendiren üç iç tendona komut veriyor.
Sualtı dokunma ve kavramayı test etmek
Araştırmacılar kolu, durgun tatlı su tanklarında silindirler, küçük kutular ve bir oyuncak denizyıldızı gibi düzensiz şekiller kullanarak teste tabi tuttular. Bir dizi denemede, kol hareketsiz asılı dururken nesneler farklı açılardan kolla temas ettirildi. Vantuzlar temasın nerede olduğunu doğru bildirdi ve kontrol sistemi, bir nesne kolun üzerine uzanıyorsa dönme ya da bir tarafına geliyorsa bükülme gibi uygun hareketleri seçti. Diğer testlerde kol, vantuzları bir şey hissedene kadar su içinde arama hareketleriyle yavaşça taradı, sonra durup nesnenin duruşunu belirledi ve etrafını sardı. Aynı algılama sinyalleri, tek bir vantuzdaki çekme kuvvetlerini okuyarak asılı bir nesnenin görünür ağırlığını tahmin etmek için bile kullanılabildi. Çok sayıda denemede, kol dış bir denetim olmadan çeşitli küçük sualtı nesnelerine tutunup kaldırmayı başardı.
Geleceğin sualtı robotları için anlamı
Yumuşak malzemeleri, ışığa dayalı dokunma sensörlerini ve katmanlı yerel kontrolü birleştirerek, bu oktopus ilhamlı kol robotların temasın olduğu yerde, uzaktaki bir bilgisayarın kararını beklemek yerine çevrelerine tepki verebileceklerini gösteriyor. Çalışma, gelecekteki sualtı makinelerinin bedenleri boyunca yayılmış birçok küçük algılama ve refleks birimi kullanarak karmaşık, kırılgan veya kötü bilinen alanları daha güvenli keşfedebileceğini öne sürüyor. Bu prototip çoğunlukla silindirik hedefler üzerinde test edilmiş olsa da, aynı tasarım daha fazla kol ve daha fazla vantuzla ölçeklendirilebilir ve robotları denizde bir oktopusun doğal akıcılığına bir adım daha yaklaştırabilir.
Atıf: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Anahtar kelimeler: yumuşak robotik, sualtı kavrama, oktopus ilhamlı tasarım, dokunsal algılama, otonom manipülasyon