Clear Sky Science · it
Controllo periferico abilitato da sensori distribuiti in un braccio robotico morbido ispirato al polpo per la presa autonoma sott’acqua
Perché conta un braccio robotico flessibile
Immaginate un robot che possa tastare delicatamente una barriera corallina, raccogliere una conchiglia fragile senza romperla o ispezionare un edificio allagato senza ribaltare nulla. Per farlo in sicurezza, le macchine hanno bisogno di corpi morbidi e di sensi distribuiti lungo quei corpi, proprio come negli animali. Questo studio mostra come copiare il modo in cui un braccio di polpo sente e reagisce possa dare a un robot subacqueo quel tipo di tatto sottile.
Imparare da un polpo
I tentacoli del polpo sono famosi per la loro grazia e destrezza. Ogni braccio contiene centinaia di ventose dotate di sensori tattili e chimici, e gran parte delle decisioni avviene localmente nel braccio piuttosto che nel cervello centrale dell’animale. Quando una ventosa percepisce qualcosa, può attivare riflessi semplici sul posto pur partecipando a movimenti più ampi e coordinati. I ricercatori di questo lavoro hanno cercato di ricreare quella combinazione di struttura morbida, tatto ricco e controllo locale in un braccio robotico in grado di operare sott’acqua.
Costruire un braccio morbido con ventose intelligenti
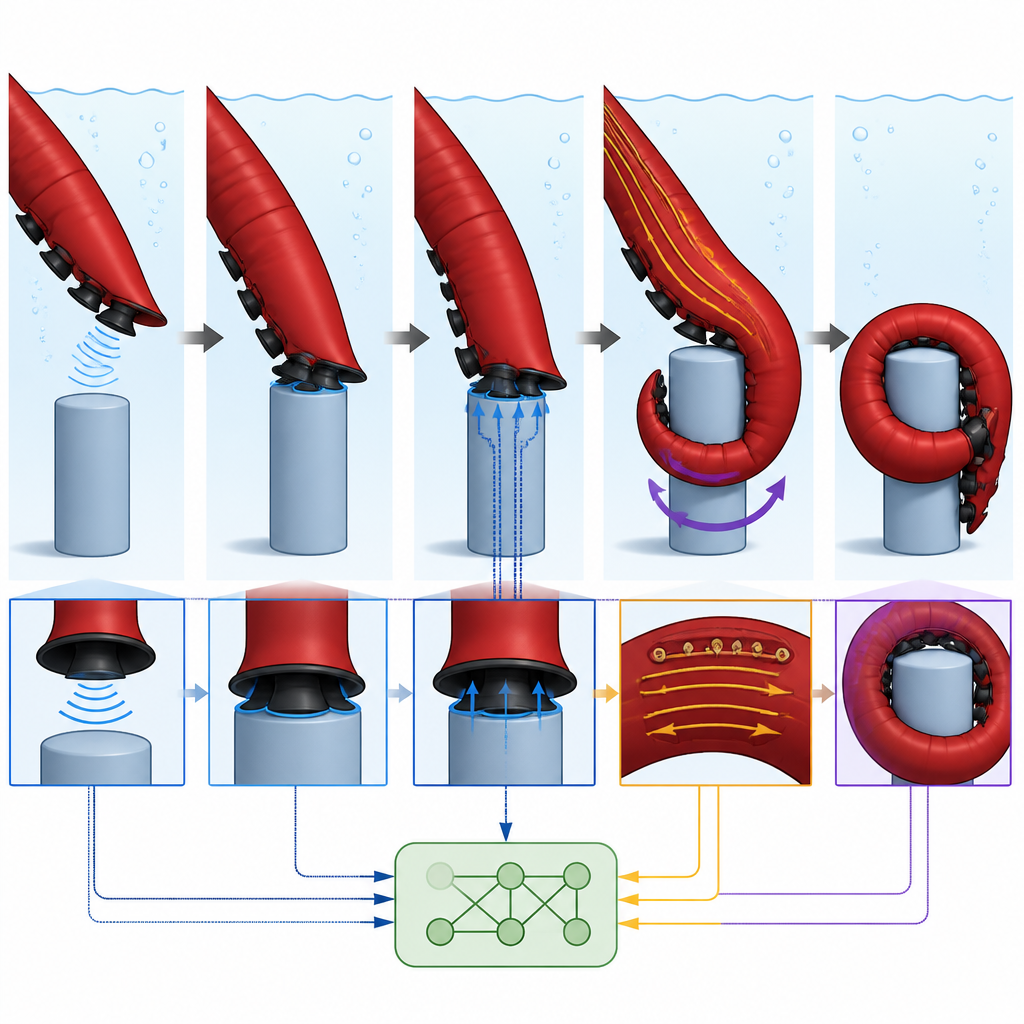
Il team ha progettato un braccio morbido a forma di cono lungo circa quaranta centimetri, rastremato da una base spessa fino a una punta sottile, simile a un piccolo braccio di polpo. Sul lato inferiore hanno collocato dieci ventose artificiali che diminuiscono di dimensione verso la punta. All’interno di ogni ventosa è inserita una piccola scheda elettronica con diodi luminosi e sensori di luce incastonati in un corpo di silicone morbido e colorato. Quando il silicone si deforma durante il contatto, cambia il pattern della luce riflessa. Da questi segnali ottici il sistema può determinare se una ventosa sta toccando qualcosa, quanto forte preme e persino da quale direzione proviene il contatto. Test accurati in aria e in acqua hanno mostrato che le ventose rispondono linearmente alla forza in intervalli delicati, funzionano affidabilmente per migliaia di cicli e possono rilevare la direzione del contatto entro pochi gradi per piccole aree di contatto.

Lasciare che il braccio decida ai margini
Per trasformare questo tatto in movimento intelligente, i ricercatori hanno imitato il modo in cui il controllo è distribuito lungo un braccio di polpo. Ogni ventosa dispone di elettronica locale che funziona come un piccolo centro nervoso: non appena un segnale supera una soglia impostata, quella ventosa può attivare la suzione come riflesso, aggrappandosi alla superficie vicina. Allo stesso tempo, informazioni semplificate su dove e come è avvenuto il contatto vengono inviate a uno strato superiore che svolge il ruolo di sistema nervoso periferico. Questo strato non riceve i dati grezzi da tutti i sensori ma solo sintesi della direzione di contatto di ogni ventosa. Usando quel quadro combinato, sceglie strategie ampie come piegare il braccio verso o lontano dal corpo o avvolgerlo intorno a un oggetto, quindi comanda i tre tendini interni che guidano il braccio.
Testare il tatto e la presa sott’acqua
I ricercatori hanno messo alla prova il braccio in vasche di acqua dolce ferma, utilizzando cilindri semplici, piccole scatole e forme irregolari come una stella marina giocattolo. In una serie di prove, il braccio restava fermo mentre gli oggetti venivano portati in contatto da diverse angolazioni. Le ventose hanno riportato correttamente dove avveniva il contatto e il sistema di controllo ha scelto mosse corrispondenti, come ruotare quando un oggetto giaceva trasversalmente sul braccio o piegarsi quando era sul lato. In altri test, il braccio esplorava lentamente l’acqua con movimenti di ricerca finché le ventose non percepivano qualcosa, quindi si fermava, valutava la postura dell’oggetto e si avvolgeva attorno ad esso. Gli stessi segnali di sensore potevano persino essere usati per stimare il peso apparente di un oggetto sospeso leggendo le forze di trazione su una singola ventosa. In molte prove, il braccio è riuscito ad agganciarsi e sollevare diversi tipi di piccoli oggetti subacquei senza supervisione esterna.
Cosa significa per i futuri robot subacquei
Combinando materiali morbidi, sensori tattili a base di luce e controllo locale a strati, questo braccio ispirato al polpo mostra come i robot possano reagire all’ambiente proprio nel punto di contatto, invece di aspettare la decisione di un computer distante. Il lavoro suggerisce che le macchine subacquee future potrebbero esplorare spazi affollati, fragili o poco conosciuti in modo più sicuro, usando molte piccole unità di sensori e riflesso distribuite lungo il corpo. Sebbene questo prototipo sia stato testato soprattutto su bersagli modesti e simili a cilindri, lo stesso progetto potrebbe essere scalato ed esteso a più bracci e più ventose, avvicinando i robot alla fluidità naturale di un polpo nel mare.
Citazione: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Parole chiave: robotica morbida, presa sott’acqua, design ispirato al polpo, sensazione tattile, manipolazione autonoma