Clear Sky Science · sv
Perifer styrning möjliggjord av distribuerad känsel i en bläckfiskinspirerad mjuk robotarm för autonomt undervattensgrepp
Varför en flexibel robotarm är viktig
Föreställ dig en robot som varsamt känner sig fram över ett korallrev, plockar upp ett ömtåligt skal utan att krossa det eller söker igenom en översvämmad byggnad utan att riva ner saker. För att göra det säkert behöver maskiner mjuka kroppar och sinnen utbredda över dessa kroppar, precis som djur har. Denna studie visar hur efterliknande av hur en bläckfiskarm känner och reagerar kan ge en undervattensrobot just den typen av finstämda beröring.
Lärdomar från en bläckfisk
Bläckfiskarmar är kända för sin graciösa rörlighet och fingerfärdighet. Varje arm innehåller hundratals suckkoppar fyllda med berörings‑ och kemiska sensorer, och mycket av beslutsfattandet sker lokalt i armen snarare än i djurets centrala hjärna. När en suckkopp känner något kan den utlösa enkla reflexer på plats samtidigt som den deltar i större, koordinerade rörelser. Forskarna bakom detta arbete ville återskapa den blandningen av mjuk struktur, rik känsel och lokal styrning i en robotarm som kan fungera under vatten.
Bygga en mjuk arm med smarta suckkoppar
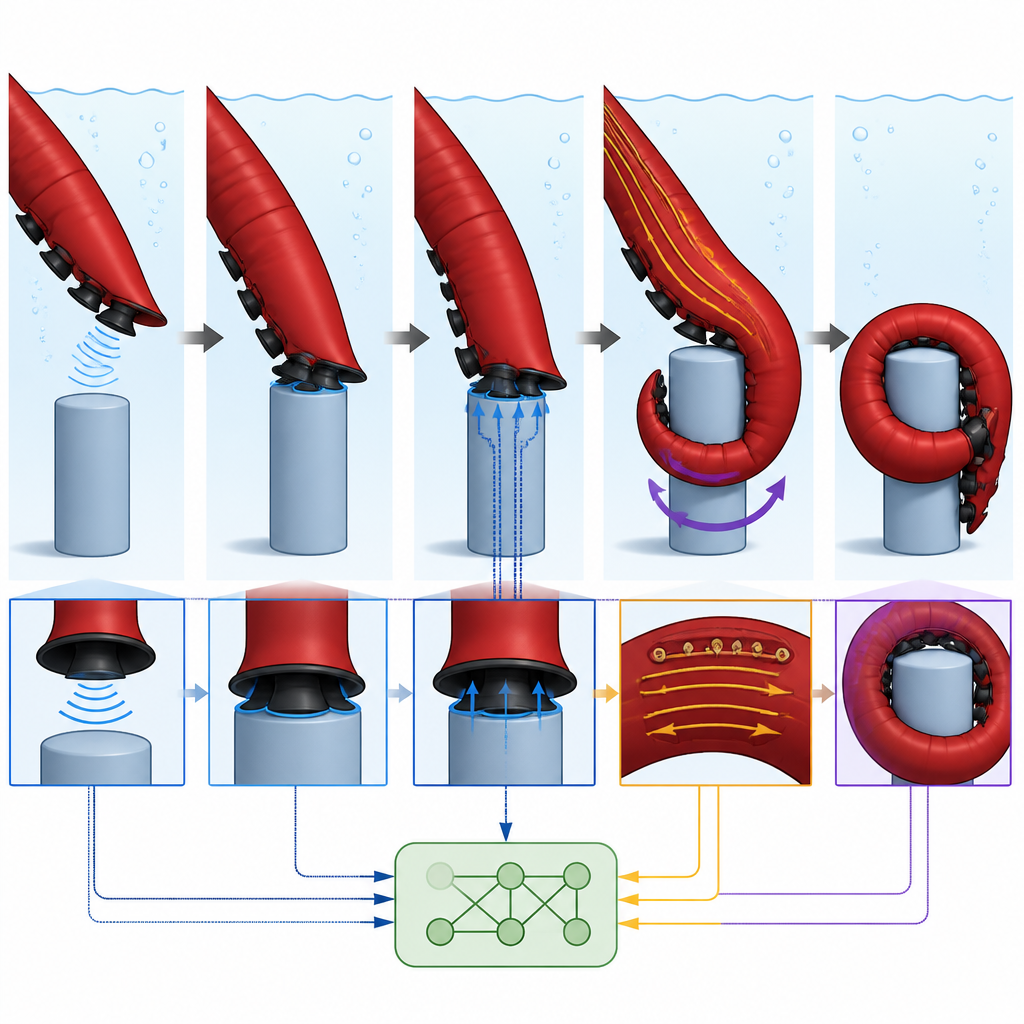
Teamet designade en konformad mjuk arm cirka fyrtio centimeter lång, avsmalnande från en tjock bas till en smal spets, ungefär som en liten bläckfiskarm. Längs undersidan placerade de tio artificiella suckkoppar som minskar i storlek mot spetsen. Inuti varje kopp sitter ett litet elektronikkort med lysdioder och ljussensorer inbäddade i en mjuk, färgad silikonkropp. När silikonet deformerar vid kontakt ändras mönstret av reflekterat ljus. Ur dessa optiska signaler kan systemet avgöra om en kopp rör vid något, hur hårt den trycker och till och med från vilken riktning kontakten kommer. Noggranna tester i luft och vatten visade att kopparna svarar linjärt mot kraft inom känsliga intervall, fungerar pålitligt under tusentals cykler och kan uppfatta kontaktriktning inom några grader för små kontaktområden.

Låta armen bestämma vid kanten
För att omvandla denna beröring till intelligent rörelse efterliknade forskarna hur styrning är utspridd längs en bläckfiskarm. Varje suckkopp har sin egen lokala elektronik som fungerar som ett litet nervcentrum: så snart en signal korsar en förinställd tröskel kan den koppen slå på sug som en reflex och greppa närliggande yta. Samtidigt skickas förenklad information om var och hur kontakten skedde till ett högre lager som spelar rollen av ett perifert nervsystem. Detta lager ser inte rådata från alla sensorer utan endast sammanfattningar av kontaktriktning från varje kopp. Med den sammansatta bilden väljer det breda strategier som att böja armen mot eller bort från kroppen eller vrida runt ett föremål, och kommanderar sedan de tre inre senorna som styr armen.
Testa undervattensberöring och grepp
Forskarlaget testade armen i tankar med stilla sötvatten, med enkla cylindrar, små lådor och oregelbundna former som en leksaksstjärna. I en serie försök hängde armen stilla medan föremål fördes i kontakt i olika vinklar. Suckkopparna rapporterade korrekt var kontakten skedde och styrsystemet valde matchande rörelser, som att vrida när ett föremål låg tvärs över armen eller böja när det låg åt ena sidan. I andra tester svepte armen långsamt genom vattnet i sökrörelser tills dess koppar kände något, stannade, identifierade föremålets ställning och snodde sig runt det. Samma sensingsignaler kunde till och med användas för att uppskatta det uppenbara vikten av ett upphängt föremål genom att avläsa dragkrafterna på en enskild suckkopp. Över många försök lyckades armen fästa vid och lyfta flera typer av små undervattensföremål utan yttre övervakning.
Vad detta betyder för framtida undervattensrobotar
Genom att kombinera mjuka material, ljusbaserade kontaktsensorer och lager av lokal styrning visar denna bläckfiskinspirerade arm hur robotar kan reagera på sin omgivning där kontakten sker i stället för att vänta på en avlägsen dator. Arbetet antyder att framtida undervattensmaskiner skulle kunna utforska röriga, sköra eller dåligt kända miljöer säkrare genom att använda många små sensor‑ och reflexenheter utspridda längs sina kroppar. Medan denna prototyp främst testades mot ganska modesta, cylindriska mål kan samma design skalas upp och utökas till fler armar och fler koppar, vilket för robotar ett steg närmare bläckfiskens naturliga fluiditet i havet.
Citering: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Nyckelord: mjukrobotik, undervattensgrepp, bläckfiskinspirerad design, taktil sensing, autonom manipulation