Clear Sky Science · pl
Sterowanie obwodowe możliwe dzięki rozproszonemu czujeniu w inspirowanym ośmiornicą miękkim ramieniu robota do autonomicznego chwytania pod wodą
Dlaczego elastyczne ramię robota ma znaczenie
Wyobraź sobie robota, który ostrożnie wyczuwa drogę po rafie koralowej, podnosi kruche muszle bez ich uszkadzania albo przeszukuje zalany budynek, nie przewracając przedmiotów. Aby robić to bezpiecznie, maszyny potrzebują miękkich korpusów i zmysłów rozproszonych po tych korpusach, podobnie jak zwierzęta. Badanie to pokazuje, jak skopiowanie sposobu, w jaki ramię ośmiornicy czuje i reaguje, może dać robotowi podwodnemu taką subtelną dotykowość.
Nauka od ośmiornicy
Ramiona ośmiornicy słyną z gracji i zręczności. Każde ramię ma setki przyssawek wypełnionych czujnikami dotyku i chemicznymi, a wiele decyzji zapada lokalnie w ramieniu, a nie w centralnym mózgu zwierzęcia. Gdy przyssawka coś wyczuje, może wywołać proste odruchy na miejscu, jednocześnie uczestnicząc w większych, skoordynowanych ruchach. Badacze stojący za tym projektem postanowili odtworzyć to połączenie miękkiej struktury, bogatego dotyku i lokalnego sterowania w robotycznym ramieniu działającym pod wodą.
Budowa miękkiego ramienia z inteligentnymi przyssawkami
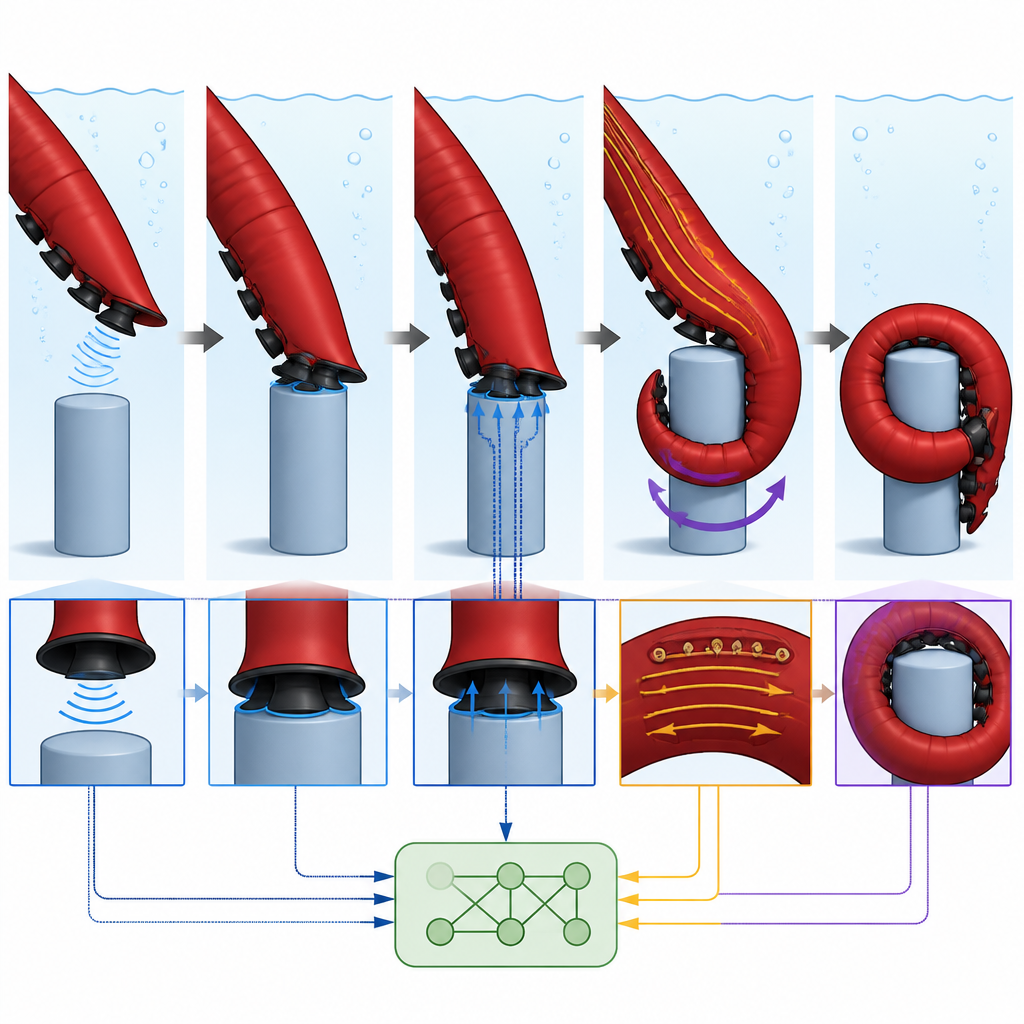
Zespół zaprojektował stożkowate miękkie ramię o długości około czterdziestu centymetrów, zwężające się od grubej podstawy do wąskiego czubka, podobnie jak małe ramię ośmiornicy. Na jego spodniej stronie rozmieszczono dziesięć sztucznych przyssawek, które zmniejszają się ku końcowi. W każdej przyssawce umieszczono małą płytkę elektroniczną z diodami emitującymi światło i fotodetektorami, zatopionymi w miękkim, kolorowym silikonie. Gdy silikon odkształca się podczas kontaktu, zmienia się wzór odbitego światła. Z tych sygnałów optycznych system potrafi rozpoznać, czy przyssawka dotyka czegoś, z jaką siłą naciska, a nawet z jakiego kierunku pochodzi kontakt. Dokładne testy w powietrzu i w wodzie wykazały, że przyssawki reagują liniowo na siłę w delikatnym zakresie, działają niezawodnie przez tysiące cykli i potrafią wykryć kierunek kontaktu z dokładnością do kilku stopni dla małych powierzchni styku.

Pozwalając ramieniu decydować na krawędzi
Aby przekształcić to dotykanie w inteligentny ruch, badacze naśladowali sposób, w jaki sterowanie jest rozproszone w ramieniu ośmiornicy. Każda przyssawka ma swoją lokalną elektronikę działającą jak niewielkie centrum nerwowe: gdy sygnał przekroczy ustalony próg, przyssawka może automatycznie włączyć ssanie jako odruch, chwytając pobliską powierzchnię. Jednocześnie uproszczone informacje o miejscu i charakterze kontaktu są wysyłane do wyższej warstwy pełniącej rolę obwodowego układu nerwowego. Ta warstwa nie widzi surowych danych ze wszystkich czujników, lecz jedynie podsumowania kierunku kontaktu z każdej przyssawki. Na podstawie tego zbiorczego obrazu wybiera szerokie strategie, takie jak zginanie ramienia w kierunku lub od ciała albo skręcanie wokół obiektu, a następnie wydaje polecenia trzem wewnętrznym ścięgnom sterującym ramieniem.
Testowanie dotyku i chwytu pod wodą
Badacze poddali ramię próbom w zbiornikach ze stojącą świeżą wodą, używając prostych walców, małych pudełek i nieregularnych kształtów, takich jak zabawkowa rozgwiazda. W jednym zestawie prób ramię wisiało nieruchomo, podczas gdy obiekty zbliżano pod różnymi kątami. Przyssawki poprawnie zgłaszały miejsce kontaktu, a system sterowania dobierał odpowiadające ruchy, na przykład skręcanie, gdy obiekt leżał poprzecznie na ramieniu, lub zginanie, gdy był po jednej stronie. W innych testach ramię powoli przeciągało się przez wodę w poszukiwaniu, aż przyssawki coś wyczuły, po czym zatrzymywało się, określało orientację obiektu i oplatało go. Te same sygnały czuciowe można było nawet wykorzystać do oszacowania pozornego ciężaru zawieszonego obiektu, odczytując siły ciągnące na jednej przyssawce. W wielu próbach ramię zdołało przyczepić się do i podnieść kilka typów małych przedmiotów podwodnych bez nadzoru zewnętrznego.
Co to oznacza dla przyszłych robotów podwodnych
Łącząc miękkie materiały, czujniki dotykowe oparte na świetle i wielowarstwowe sterowanie lokalne, to inspirowane ośmiornicą ramię pokazuje, jak roboty mogą reagować na otoczenie tam, gdzie następuje kontakt, zamiast czekać na decyzję od odległego komputera. Praca sugeruje, że przyszłe maszyny podwodne będą mogły bezpieczniej eksplorować zagracone, kruche lub słabo znane przestrzenie, dzięki wielu małym jednostkom sensorycznym i odruchowym rozproszonym wzdłuż swoich ciał. Choć ten prototyp testowano głównie na umiarkowanych, walcowatych celach, ten sam projekt można skalować i rozszerzać o więcej ramion i przyssawek, przybliżając roboty do naturalnej płynności ośmiornicy w morzu.
Cytowanie: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Słowa kluczowe: miękka robotyka, chwytanie pod wodą, projekt inspirowany ośmiornicą, czucie dotykowe, autonomiczna manipulacja