Clear Sky Science · he
בקרת פריפריה המופעלת על‑ידי חישה מבוזרת בזרוע רכה בהשראת תמנון לאחיזה תת־מימית אוטונומית
מדוע זרוע רובוטית גמישה חשובה
דמיינו רובוט שיכול להרגיש בעדינות סביב שונית אלמוגים, להרים קליפה שבירה מבלי לשבור אותה, או לחפש בתוך מבנה מוצף מבלי להפיל חפצים. כדי לפעול בצורה בטוחה כזו, מכונות זקוקות לגופים רכים ולחיישנים מפוזרים לאורךם, בדומה לבעלי חיים. מחקר זה מראה כיצד העתקת הדרך שבה זרוע תמנון מרגישה ומגיבה יכולה להעניק לרובוט תת־מימי את אותה תחושת מגע עדינה.
ללמוד מתמנון
זרועות התמנון ידועות בחן ובדקנותן. בכל זרוע יש מאות כוסות יניקה רוויות חיישני מגע וכימיה, והרבה מהקבלת ההחלטות מתרחשת באופן מקומי בזרוע ולא במוח המרכזי של בעל החיים. כאשר כוסית חשה משהו, היא יכולה לעורר רפלקסים פשוטים במקום בעוד שהיא משתתפת בתנועות מתואמות רחבות יותר. החוקרים פרסמו לשחזר את השילוב הזה של מבנה רך, חישה עשירה ושליטה מקומית בזרוע רובוטית היכולה לפעול מתחת למים.
בניית זרוע רכה עם כוסות יניקה חכמות
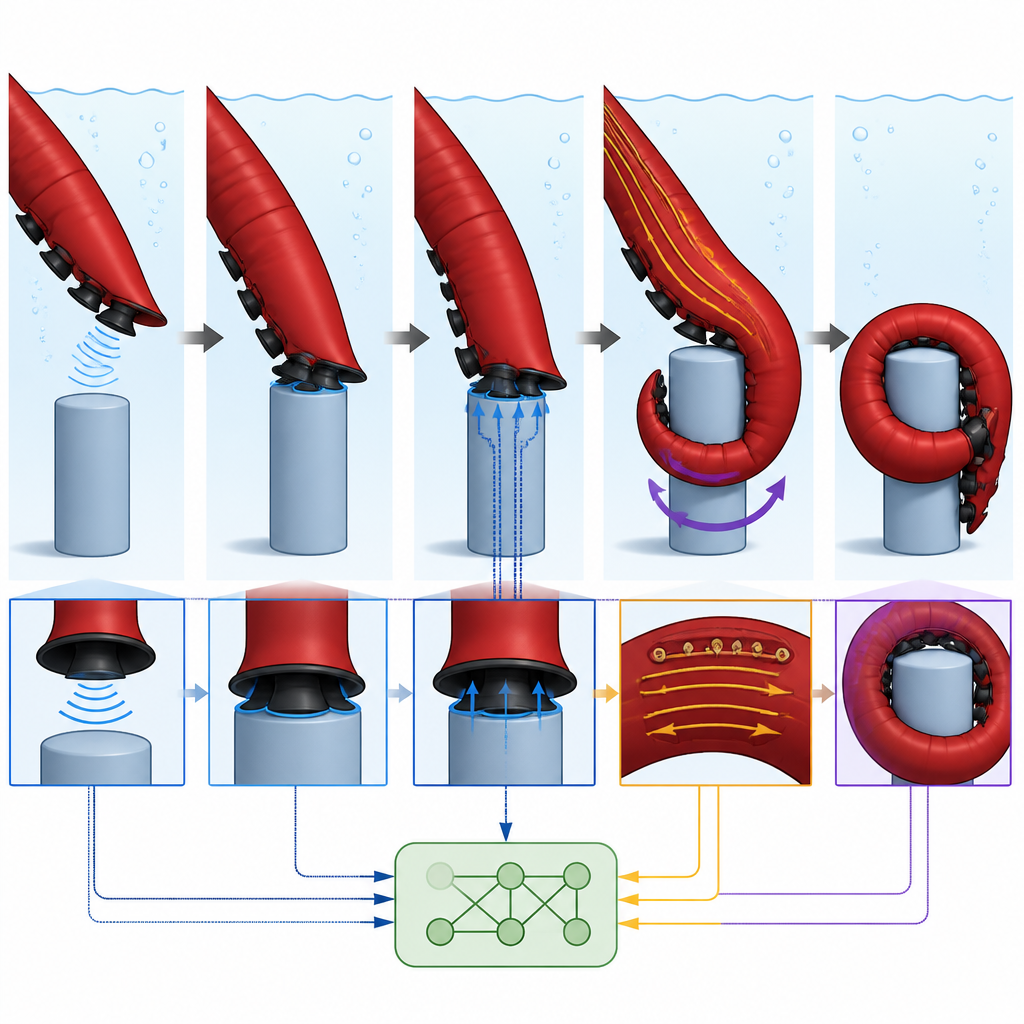
הצוות תכנן זרוע רכה בצורת חרוט באורך של כארבעים סנטימטרים, מצטמצמת מבסיס עבה לקצה צר, בדומה לזרוע תמנון קטנה. מתחתיה הוצבו עשר כוסות יניקה מלאכותיות שמטות בגודלן כלפי הקצה. בתוך כל כוס נמצאת לוחית אלקטרונית זעירה עם דיודות פולטות אור וחיישני אור המשובצים בגוף סיליקון רך וצבעוני. כאשר הסיליקון מתעוות במגע, דפוס האור המוחזר משתנה. מתוך אותות אופטיים אלה המערכת יכולה לזהות האם הכוס נוגעת במשהו, כמה חזק היא לוחצת, ואפילו מאיזו כיוון הגיע המגע. בדיקות קפדניות באוויר ובמים הראו שהכוסות מגיבות בקו ישר לכוח בטווחים עדינים, עובדות באמינות לאורך אלפי מחזורים, ויכולות לחוש כיוון מגע בתוך כמה מעלות לאזורי מגע קטנים.

לאפשר לזרוע להחליט בקצה
כדי להפוך את תחושת המגע לתנועה חכמה, החוקרים חיקו את אופן הפיזור של הבקרה לאורך זרוע תמנון. לכל כוס יניקה יש אלקטרוניקה מקומית שמתפקדת כמרכז עצבי זעיר: ברגע שאות חוצה סף מוגדר, אותה כוס יכולה להפעיל יניקה כרפלקס, להיאחז במשטח הקרוב. במקביל, מידע מפושט על מיקום ואופי המגע נשלח לשכבה עליונה המשמשת כעצב פריפרי. שכבה זו אינה רואה את המידע הגולמי מכל החיישנים אלא רק סיכומי כיוון מגע מכל כוס. בהתבסס על התמונה המשולבת הזו היא בוחרת אסטרטגיות רחבות כמו כיפוף הזרוע כלפי או רחוק מהגוף או סיבוב סביב עצם, ואז מפקדת על שלושת הגידים הפנימיים שמנווטים את הזרוע.
בדיקות של מגע ואחיזה מתחת למים
החוקרים ניסו את הזרוע במיכלי מים עומדים, עם גלילים פשוטים, קופסאות קטנות וצורות לא סדירות כמו צעצוע כוכב־ים. באחת הסדרות הנסיוניות הזרוע נתלתה במקום בעוד עצמים הובאו במגע בזוויות שונות. כוסות היניקה דיווחו נכון היכן המגע התרחש, ומערכת הבקרה בחרה תנועות תואמות, כגון סיבוב כאשר עצם שכב לרוחב הזרוע או כיפוף כאשר הוא נמצא בצד. בבדיקות אחרות הזרוע סרקה באיטיות במים בתנועות חיפוש עד שכוסותיה חשו משהו, אז עצרה, קבעה את גיאומטריית העצם והתכרכה סביבו. אותות החישה עצמם שולבו גם לאמידת המשקל הנראה של עצם תלוי על ידי קריאת כוחות מתיחה מכוס יניקה בודדת. לאורך ניסויים רבים הצליחה הזרוע להצמיד ולהרים מספר סוגים של חפצים תת־מימיים קטנים ללא פיקוח חיצוני.
מה זה אומר לגבי רובוטים תת־מימיים בעתיד
על ידי שילוב חומרים רכים, חיישני מגע מבוססי אור ובקרה מקומית רב־שכבתית, הזרוע בהשראת התמנון מראה כיצד רובוטים יכולים להגיב לסביבה במקום המגע עצמו, במקום להמתין למחשב מרוחק שיחליט. העבודה מרמזת שמכונות תת־מימיות עתידיות יוכלו לחקור מרחבים צפופים, שבירים או לא ידועים בצורה בטוחה יותר, באמצעות יחידות חישה ורפלקס קטנות רבות הפרוסות לאורך גופן. בעוד שהאב־טיפוס הזה נבחן בעיקר על מטרות פשוטות בדמות גלילים, ניתן להרחיב את העיצוב ולהגדילו לעוד זרועות וכוסות, ובכך לקרב את הרובוטים לנזילות הטבעית של תמנון בים.
ציטוט: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
מילות מפתח: רובוטיקה רכה, אחיזה תת־מימית, עיצוב בהשראת תמנון, חישה מישושית, מניפולציה אוטונומית