Clear Sky Science · fr
Contrôle périphérique activé par une détection répartie dans un bras robotique mou inspiré de la pieuvre pour la préhension autonome sous-marine
Pourquoi un bras robotique flexible est important
Imaginez un robot capable de se faufiler doucement autour d’un récif corallien, de ramasser une coquille fragile sans la casser, ou d’explorer un bâtiment inondé sans renverser les objets. Pour agir en toute sécurité, ces machines ont besoin de structures souples et de capteurs répartis le long de leur corps, à l’instar des animaux. Cette étude montre comment reproduire la façon dont un bras de pieuvre ressent et réagit peut conférer à un robot sous-marin ce type de toucher subtil.
Apprendre de la pieuvre
Les bras des pieuvres sont réputés pour leur grâce et leur dextérité. Chaque bras contient des centaines de ventouses équipées de capteurs tactiles et chimiques, et une grande partie du traitement a lieu localement dans le bras plutôt que dans le cerveau central de l’animal. Lorsqu’une ventouse perçoit quelque chose, elle peut déclencher des réflexes simples sur place tout en participant à des mouvements coordonnés plus larges. Les chercheur·e·s à l’origine de ce travail se sont donné pour objectif de recréer ce mélange de structure souple, de sens tactile riche et de contrôle local dans un bras robotique capable de fonctionner sous l’eau.
Construire un bras mou avec des ventouses intelligentes
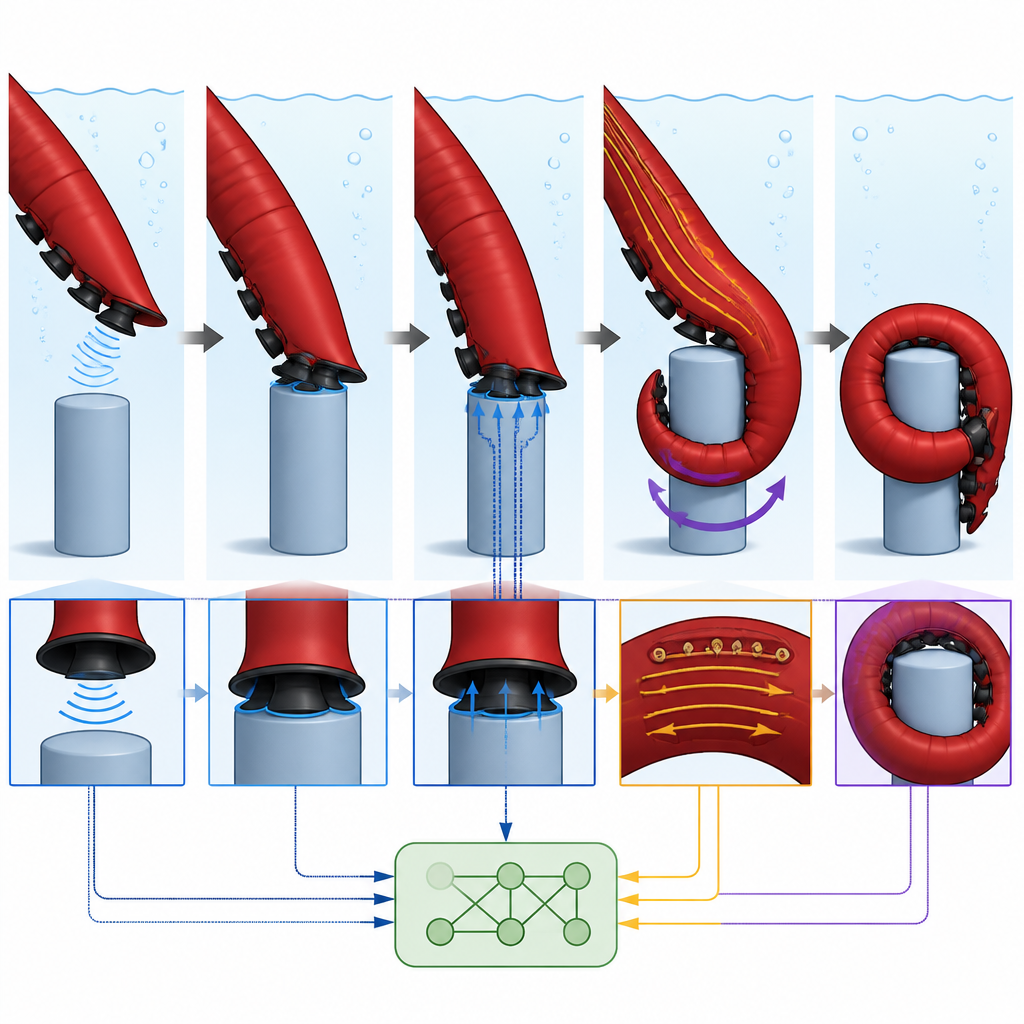
L’équipe a conçu un bras conique souple d’environ quarante centimètres de long, s’amincissant d’une base épaisse vers une pointe étroite, à la manière d’un petit bras de pieuvre. Sous sa face inférieure, dix ventouses artificielles sont disposées en diminuant de taille vers la pointe. À l’intérieur de chaque ventouse se trouve une petite carte électronique avec des diodes électroluminescentes et des capteurs de lumière intégrés dans un corps en silicone coloré et souple. Lorsque le silicone se déforme au contact, le motif de lumière réfléchie change. À partir de ces signaux optiques, le système peut déterminer si une ventouse touche quelque chose, avec quelle force elle appuie, et même la direction d’où provient le contact. Des tests soignés à l’air et dans l’eau ont montré que les ventouses répondent de façon linéaire à la force dans des plages de contact faibles, fonctionnent de manière fiable pendant des milliers de cycles, et peuvent détecter la direction du contact avec une précision de quelques degrés pour de petites zones de contact.

Laisser le bras décider au niveau périphérique
Pour transformer ce toucher en mouvement intelligent, les chercheur·e·s ont imité la manière dont le contrôle est distribué le long d’un bras de pieuvre. Chaque ventouse dispose de son électronique locale qui agit comme un petit centre nerveux : dès qu’un signal dépasse un seuil fixé, la ventouse peut activer la succion en réflexe, agrippant la surface voisine. En parallèle, des informations simplifiées sur le lieu et la nature du contact sont envoyées à une couche supérieure qui joue le rôle d’un système nerveux périphérique. Cette couche ne reçoit pas les données brutes de tous les capteurs mais seulement des résumés de la direction de contact fournis par chaque ventouse. À partir de ce tableau combiné, elle choisit des stratégies générales — par exemple plier le bras vers ou loin du corps, ou s’enrouler autour d’un objet — puis commande les trois tendons internes qui orientent le bras.
Tester le toucher et la préhension sous l’eau
Les chercheur·e·s ont testé le bras dans des réservoirs d’eau douce calme, en utilisant des cylindres simples, de petites boîtes et des formes irrégulières comme une étoile de mer jouet. Dans une série d’essais, le bras restait immobile pendant que des objets étaient amenés en contact selon différents angles. Les ventouses ont correctement signalé l’emplacement du contact, et le système de contrôle a choisi des mouvements appropriés, comme se tordre lorsqu’un objet reposait au travers du bras ou se plier lorsqu’il se trouvait sur un côté. Dans d’autres tests, le bras balayait lentement l’eau en mouvements de recherche jusqu’à ce que ses ventouses détectent quelque chose, puis il s’arrêtait, évaluait la posture de l’objet et s’enroulait autour. Les mêmes signaux de détection pouvaient même être utilisés pour estimer le poids apparent d’un objet suspendu en lisant les forces de traction sur une seule ventouse. Sur de nombreux essais, le bras a réussi à s’accrocher et à soulever plusieurs types de petits objets sous-marins sans supervision extérieure.
Ce que cela implique pour les robots sous-marins du futur
En combinant matériaux souples, capteurs tactiles optiques et contrôle local en couches, ce bras inspiré de la pieuvre montre comment des robots peuvent réagir à leur environnement là où le contact se produit, plutôt que d’attendre la décision d’un ordinateur distant. Ce travail suggère que des machines sous-marines futures pourraient explorer des espaces encombrés, fragiles ou mal connus de manière plus sûre, en s’appuyant sur de nombreuses unités sensibles et réflexes réparties le long de leur corps. Bien que ce prototype ait été testé principalement sur des cibles modestes et de type cylindre, la même conception pourrait être montée en échelle et étendue à plusieurs bras et plus de ventouses, rapprochant les robots de la fluidité naturelle d’une pieuvre dans la mer.
Citation: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Mots-clés: robotique souple, préension sous-marine, conception inspirée de la pieuvre, détection tactile, manipulation autonome