Clear Sky Science · de
Peripher gesteuerte Kontrolle durch verteiltes Fühlen in einem von Oktopussen inspirierten weichen Roboterarm für autonome Unterwassergriffvorgänge
Warum ein flexibler Roboterarm wichtig ist
Stellen Sie sich einen Roboter vor, der sich behutsam an einem Korallenriff entlangtastet, eine zerbrechliche Muschel aufnimmt, ohne sie zu zerbrechen, oder ein überschwemmtes Gebäude durchsucht, ohne Dinge umzuwerfen. Damit Maschinen das sicher können, brauchen sie weiche Körper und Sinnesorgane, die im ganzen Körper verteilt sind — ähnlich wie bei Tieren. Diese Studie zeigt, wie das Nachahmen der Art und Weise, wie ein Oktopusarm fühlt und reagiert, einem Unterwasserrroboter jene feine Berührung verleiht.
Vom Oktopus lernen
Oktopusarme sind für ihre Anmut und Geschicklichkeit bekannt. Jeder Arm enthält Hunderte von Saugnäpfen, die mit Berührungs- und Chemorezeptoren bestückt sind, und ein Großteil der Entscheidungsfindung findet lokal im Arm statt statt nur im zentralen Gehirn des Tieres. Wenn ein Saugnapf etwas wahrnimmt, kann er vor Ort einfache Reflexe auslösen und gleichzeitig an größeren, koordinierten Bewegungen teilnehmen. Die Forschenden wollten genau diese Kombination aus weicher Struktur, reichhaltigem Tastsinn und lokaler Kontrolle in einem Roboterarm nachbilden, der unter Wasser arbeiten kann.
Aufbau eines weichen Arms mit intelligenten Saugnäpfen
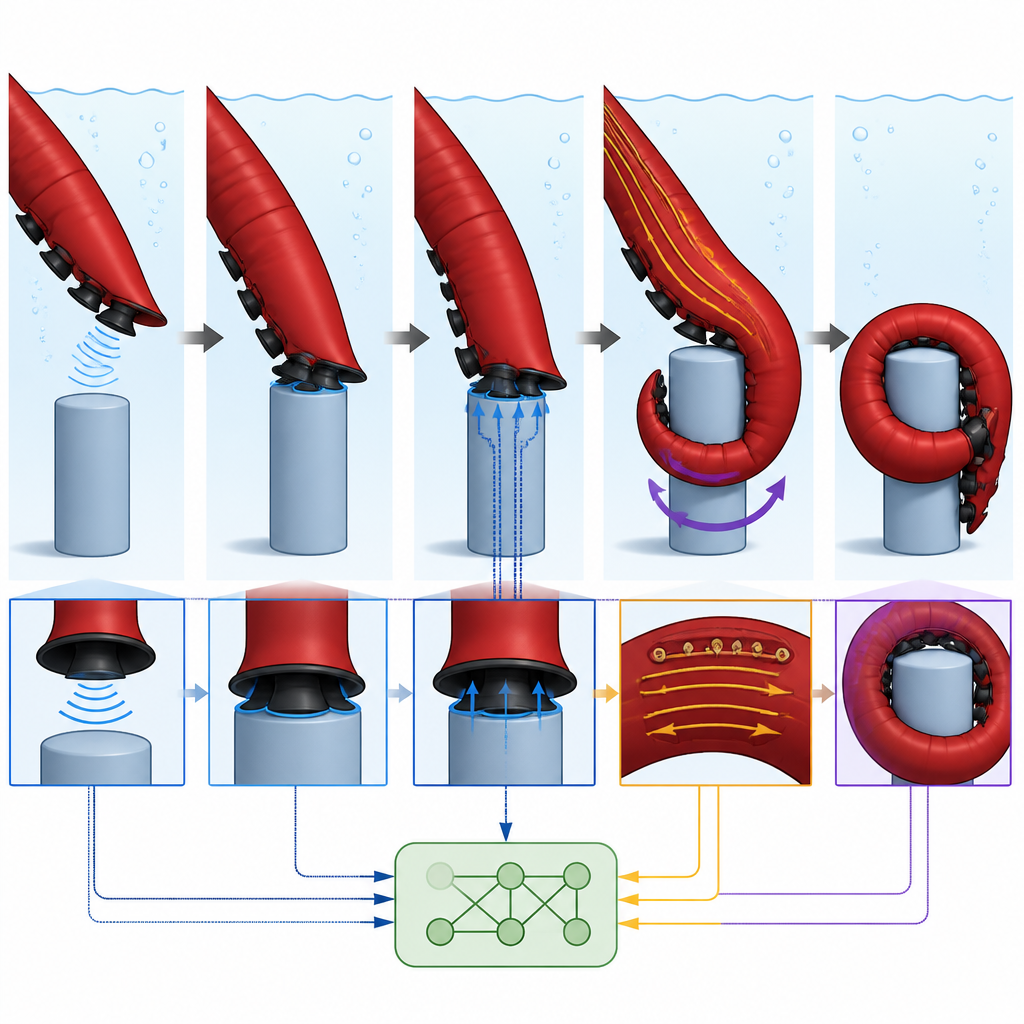
Das Team entwarf einen konisch geformten weichen Arm von etwa vierzig Zentimetern Länge, der sich von einer dicken Basis zur Spitze hin verjüngt, ähnlich einem kleinen Oktopusarm. An seiner Unterseite platzierten sie zehn künstliche Saugnäpfe, die zur Spitze hin kleiner werden. In jedem Saugnapf sitzt eine winzige Elektronikplatine mit Leuchtdioden und Lichtsensoren, eingebettet in einen weichen, gefärbten Silikonkörper. Wenn sich das Silikon bei Kontakt verformt, ändert sich das Muster des reflektierten Lichts. Aus diesen optischen Signalen kann das System erkennen, ob ein Saugnapf etwas berührt, wie stark gedrückt wird und sogar aus welcher Richtung die Berührung kommt. Sorgfältige Tests in Luft und Wasser zeigten, dass die Saugnäpfe in sanften Kraftbereichen linear auf Kraft reagieren, über Tausende von Zyklen zuverlässig funktionieren und die Kontaktrichtung bei kleinen Kontaktflächen auf wenige Grad genau feststellen können.

Den Arm an der Peripherie entscheiden lassen
Um diesen Tastsinn in intelligente Bewegung umzusetzen, ahmten die Forschenden die Verteilung der Kontrolle entlang eines Oktopusarms nach. Jeder Saugnapf besitzt eigene lokale Elektronik, die wie ein winziges Nervenzentrum wirkt: Sobald ein Signal einen festgelegten Schwellenwert überschreitet, kann der Saugnapf als Reflex die Saugkraft aktivieren und sich an der nahen Oberfläche festhalten. Gleichzeitig werden vereinfachte Informationen darüber, wo und wie der Kontakt stattfand, an eine höhere Ebene gesendet, die die Rolle eines peripheren Nervensystems übernimmt. Diese Ebene sieht nicht die Rohdaten aller Sensoren, sondern nur Zusammenfassungen zur Kontaktrichtung jedes Saugnapfs. Mit diesem kombinierten Bild wählt sie grobe Strategien wie das Biegen des Arms zum Körper hin oder davon weg oder das Umschlingen eines Objekts und steuert dann die drei internen Sehnen, die den Arm lenken.
Testen von Unterwasser-Tastsinn und Greifen
Die Forschenden testeten den Arm in Becken mit stillem Süßwasser und benutzten einfache Zylinder, kleine Kästchen und unregelmäßige Formen wie einen Spielzeug-Seestern. In einer Versuchsreihe hing der Arm reglos, während Objekte unter verschiedenen Winkeln Kontakt herstellten. Die Saugnäpfe meldeten korrekt, wo der Kontakt stattfand, und das Kontrollsystem wählte passende Bewegungen, etwa ein Verdrehung, wenn ein Objekt quer über dem Arm lag, oder ein Biegen, wenn es an einer Seite lag. In anderen Tests fuhr der Arm langsam durchs Wasser in Suchbewegungen, bis seine Saugnäpfe etwas fühlten, dann stoppte er, bestimmte die Lage des Objekts und schlang sich darum. Dieselben Sensorsignale konnten sogar verwendet werden, um das scheinbare Gewicht eines hängenden Objekts abzuschätzen, indem die Zugkräfte an einem einzelnen Saugnapf abgelesen wurden. In vielen Durchläufen gelang es dem Arm, sich an mehrere Arten kleiner Unterwasserobjekte anzulagern und sie anzuheben, ohne externe Anleitung.
Was das für zukünftige Unterwasserroboter bedeutet
Durch die Kombination weicher Materialien, lichtbasierter Taktsensorik und geschichteter lokaler Steuerung zeigt dieser vom Oktopus inspirierte Arm, wie Roboter direkt dort reagieren können, wo der Kontakt stattfindet, statt auf die Entscheidung eines entfernten Rechners zu warten. Die Arbeit legt nahe, dass künftige Unterwassermaschinen überfüllte, fragile oder schlecht bekannte Räume sicherer erkunden könnten, indem sie viele kleine Sinnes- und Reflexeinheiten entlang ihres Körpers verteilen. Während dieser Prototyp vorwiegend an mäßigen, zylinderähnlichen Zielen getestet wurde, könnte dasselbe Design skaliert und auf weitere Arme und mehr Saugnäpfe erweitert werden und Robotern damit einen Schritt näher an die natürliche Flüssigkeit eines Oktopus im Meer bringen.
Zitation: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Schlüsselwörter: weiche Robotik, Unterwassergriff, vom Oktopus inspiriertes Design, taktiles Fühlen, autonome Manipulation