Clear Sky Science · nl
Perifere controle mogelijk gemaakt door gedistribueerde sensoren in een octopus-geïnspireerde zachte robotarm voor autonome onderwatergreep
Waarom een flexibele robotarm ertoe doet
Stel je een robot voor die voorzichtig zijn weg voelt langs een koraalrif, een fragiele schelp oppakt zonder die te breken, of een overstroomd gebouw doorzoekt zonder dingen omver te stoten. Om dat veilig te doen, hebben machines lichamen nodig die zacht zijn en zintuigen die door die lichamen heen verspreid zijn, net als bij dieren. Deze studie laat zien hoe het nabootsen van de manier waarop een octopusarm voelt en reageert, een onderwaterrobot dat subtiele gevoel kan geven.
Leren van een octopus
Octopusarmen staan bekend om hun sierlijkheid en behendigheid. Elke arm bevat honderden zuignappen vol aanraking- en chemoreceptoren, en veel besluitvorming gebeurt lokaal in de arm in plaats van in het centrale brein van het dier. Wanneer een zuignap iets voelt, kan dat ter plekke eenvoudige reflexen veroorzaken terwijl het toch deelneemt aan grotere, gecoördineerde bewegingen. De onderzoekers wilden die mix van zachte structuur, rijke tastzin en lokale controle nabouwen in een robotarm die onder water kan werken.
Een zachte arm bouwen met slimme zuignappen
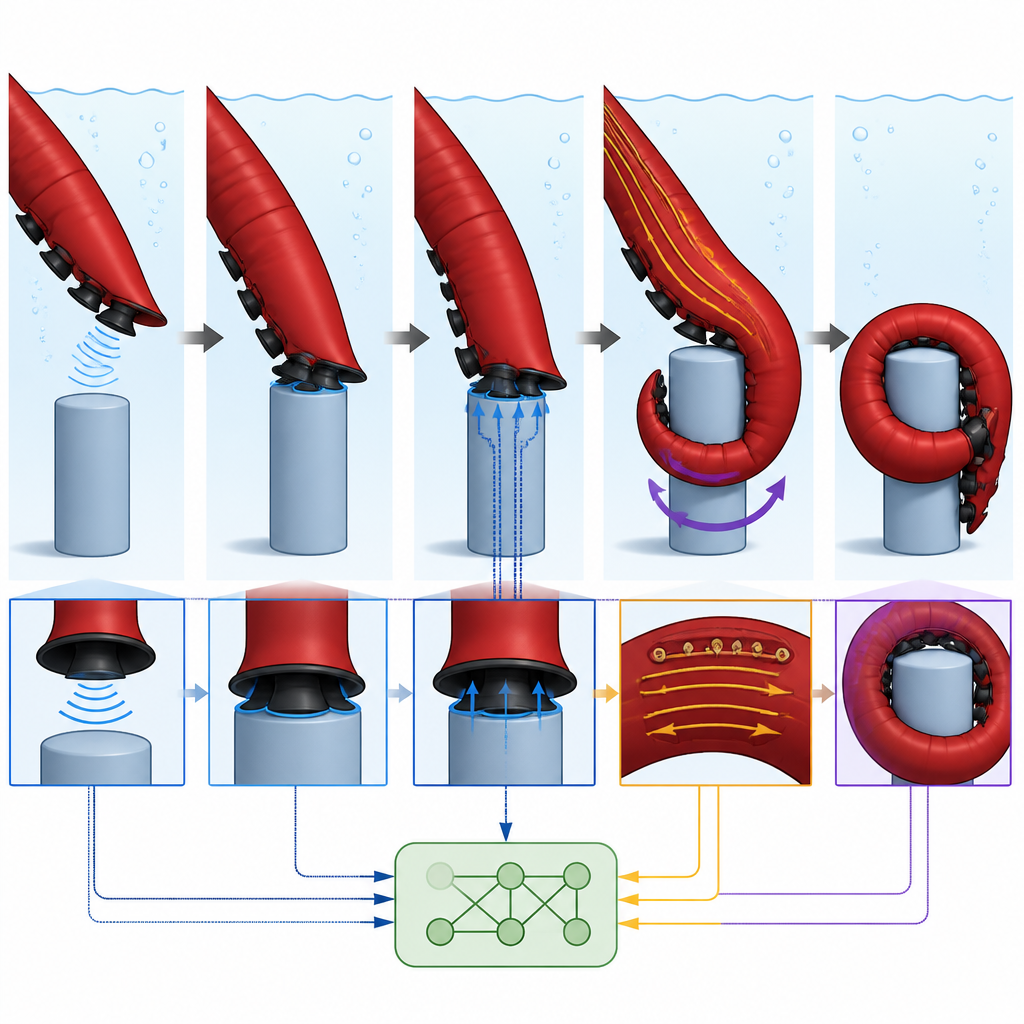
Het team ontwierp een kegelvormige zachte arm van ongeveer veertig centimeter lang, versmallend van een dikke basis naar een smalle punt, vergelijkbaar met een kleine octopusarm. Langs de onderzijde plaatsten ze tien kunstmatige zuignappen die naar de punt toe in grootte afnemen. In elke nap bevindt zich een klein elektronisch bordje met lichtgevende diodes en lichtsensoren ingebed in een zacht, gekleurd siliconenlichaam. Wanneer het siliconen vervormt bij contact, verandert het patroon van teruggekaatst licht. Uit deze optische signalen kan het systeem afleiden of een nap iets raakt, hoe hard er wordt geduwd en zelfs uit welke richting het contact komt. Zorgvuldige tests in lucht en water toonden aan dat de nappen lineair reageren op krachten binnen zachte bereiken, betrouwbaar werken gedurende duizenden cycli en contactrichting binnen een paar graden kunnen waarnemen voor kleine contactoppervlakken.

De arm aan de rand laten beslissen
Om deze aanraking om te zetten in intelligente beweging, bootsten de onderzoekers na hoe controle langs een octopusarm is verspreid. Elke zuignap heeft eigen lokale elektronica die fungeert als een klein zenuwcentrum: zodra een signaal een ingestelde drempel overschrijdt, kan die nap als reflex de zuigkracht inschakelen en het nabije oppervlak grijpen. Tegelijkertijd wordt vereenvoudigde informatie over waar en hoe het contact plaatsvond, verzonden naar een hogere laag die de rol van een perifernervensysteem vervult. Deze laag ziet geen ruwe gegevens van alle sensoren, maar alleen samenvattingen van contactrichting van elke nap. Met dat gecombineerde beeld kiest het brede strategieën zoals de arm naar het lichaam toe of ervan af buigen of om een object heen draaien, en geeft dan opdrachten aan de drie interne pezen die de arm sturen.
Testen van onderwatertast en greep
De onderzoekers testten de arm in tanks met stilstaand zoetwater, met eenvoudige cilinders, kleine doosjes en onregelmatige vormen zoals een speelgoedzeester. In een reeks proeven hing de arm stil terwijl objecten onder verschillende hoeken in contact werden gebracht. De zuignappen rapporteerden correct waar contact plaatsvond en het besturingssysteem koos bijpassende bewegingen, zoals draaien wanneer een object over de arm lag of buigen wanneer het aan één kant lag. In andere tests veegde de arm langzaam door het water in zoekbewegingen totdat zijn nappen iets voelden, waarna hij stopte, de houding van het object bepaalden en eromheen vouwde. Dezelfde sensorische signalen konden zelfs worden gebruikt om het schijnbare gewicht van een hangend object te schatten door de trekkrachten op een enkele zuignap af te lezen. In veel proeven slaagde de arm erin zich vast te hechten aan en verschillende soorten kleine onderwaterobjecten op te tillen zonder externe sturing.
Wat dit betekent voor toekomstige onderwaterrobots
Door zachte materialen, lichtgebaseerde touchesensoren en gelaagde lokale controle te combineren, laat deze octopus-geïnspireerde arm zien hoe robots ter plaatse kunnen reageren waar contact plaatsvindt, in plaats van te wachten op een verre computer om te beslissen. Het werk suggereert dat toekomstige onderwatermachines verwarde, fragiele of slecht bekende ruimtes veiliger kunnen verkennen, met veel kleine sensoren en reflexen verspreid langs hun lichamen. Terwijl dit prototype vooral op bescheiden, cilinderachtige doelen werd getest, kan hetzelfde ontwerp worden opgeschaald en uitgebreid naar meer armen en meer nappen, waardoor robots een stap dichterbij de natuurlijke vloeibaarheid van een octopus in de zee komen.
Bronvermelding: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Trefwoorden: soft robotics, onderwatergreep, octopus-geïnspireerd ontwerp, tactiele sensoring, autonome manipulatie