Clear Sky Science · en
Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping
Why a flexible robot arm matters
Imagine a robot that can gently feel its way around a coral reef, pick up a fragile shell without breaking it, or search a flooded building without knocking things over. To do that safely, machines need bodies that are soft and senses that are spread throughout those bodies, much like animals. This study shows how copying the way an octopus arm feels and reacts can give an underwater robot that kind of subtle touch.
Learning from an octopus
Octopus arms are famous for their grace and dexterity. Each arm contains hundreds of suckers packed with touch and chemical sensors, and much of the decision making happens locally in the arm rather than in the animal’s central brain. When a sucker feels something, it can trigger simple reflexes on the spot while still taking part in larger, coordinated movements. The researchers behind this work set out to recreate that mix of soft structure, rich touch, and local control in a robotic arm that can operate underwater.
Building a soft arm with smart suction cups
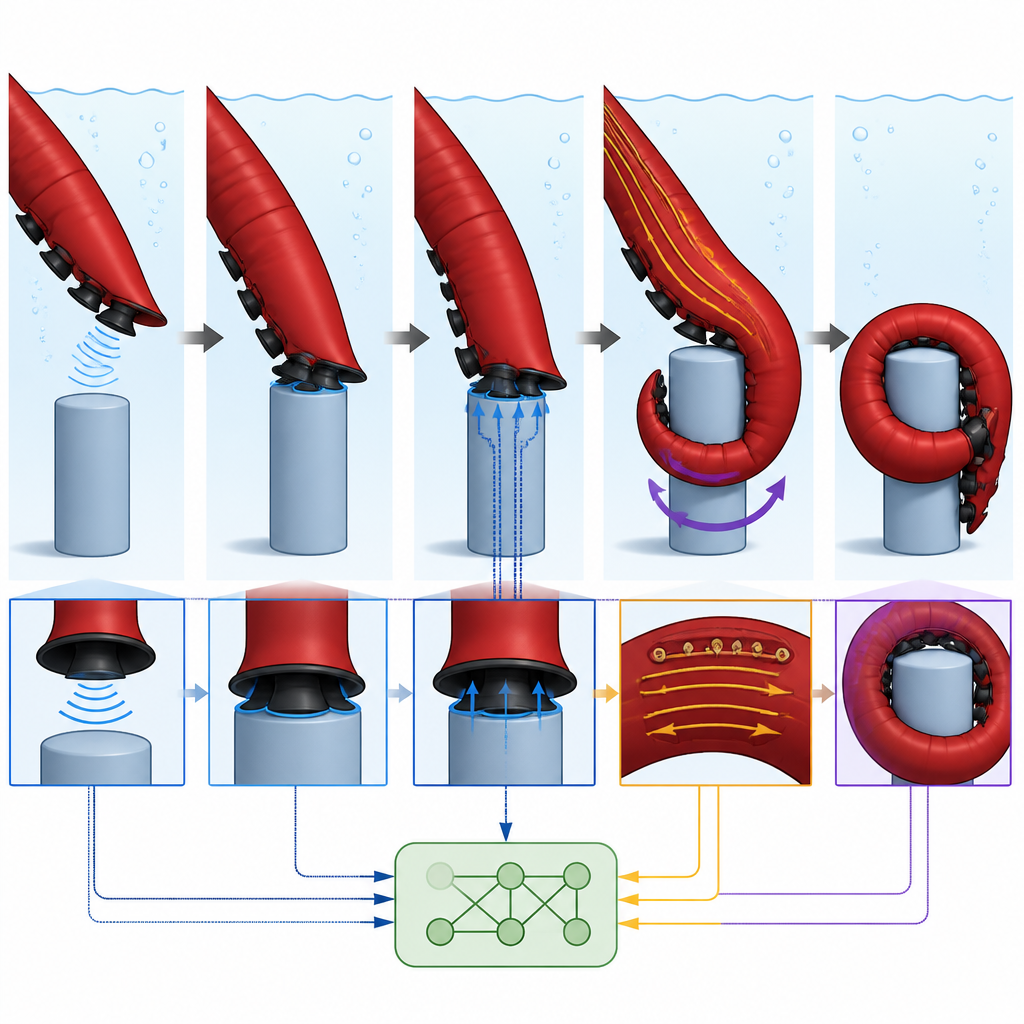
The team designed a cone shaped soft arm about forty centimeters long, tapering from a thick base to a narrow tip, much like a small octopus arm. Along its underside they placed ten artificial suction cups that shrink in size toward the tip. Inside each cup sits a tiny electronic board with light emitting diodes and light sensors embedded in a soft, colored silicone body. When the silicone deforms during contact, the pattern of reflected light changes. From these optical signals, the system can tell whether a cup is touching something, how hard it is pressing, and even from which direction the contact comes. Careful tests in air and water showed that the cups respond linearly to force over gentle ranges, work reliably for thousands of cycles, and can sense contact direction within a few degrees for small contact areas.

Letting the arm decide at the edge
To turn this touch into intelligent movement, the researchers mimicked the way control is spread along an octopus arm. Each suction cup has its own local electronics that act like a tiny nerve center: as soon as a signal crosses a set threshold, that cup can switch on suction as a reflex, gripping the nearby surface. At the same time, simplified information about where and how the contact occurred is sent to a higher layer that plays the role of a peripheral nervous system. This layer does not see raw data from all sensors but only summaries of contact direction from each cup. Using that combined picture, it chooses broad strategies such as bending the arm toward or away from the body or twisting around an object, then commands the three internal tendons that steer the arm.
Testing underwater touch and grasp
The researchers put the arm to the test in tanks of still freshwater, using simple cylinders, small boxes, and irregular shapes like a toy seastar. In one set of trials, the arm hung still while objects were brought into contact at different angles. The suction cups correctly reported where contact happened, and the control system chose matching moves, such as twisting when an object lay across the arm or bending when it lay to one side. In other tests, the arm swept slowly through the water in search motions until its cups felt something, then stopped, figured out the object’s posture, and wrapped around it. The same sensing signals could even be used to estimate the apparent weight of a suspended object by reading off the pulling forces on a single suction cup. Across many trials, the arm managed to latch onto and lift several types of small underwater objects without outside supervision.
What this means for future underwater robots
By combining soft materials, light based touch sensors, and layered local control, this octopus inspired arm shows how robots can react to their surroundings right where contact happens, instead of waiting for a distant computer to decide. The work suggests that future underwater machines could explore cluttered, fragile, or poorly known spaces more safely, using many small sensing and reflex units spread along their bodies. While this prototype was tested mostly on modest, cylinder like targets, the same design could be scaled and extended to more arms and more cups, bringing robots a step closer to the natural fluidity of an octopus in the sea.
Citation: Del Dottore, E., Adhami, R., Shahabi, E. et al. Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nat Mach Intell 8, 708–721 (2026). https://doi.org/10.1038/s42256-026-01230-y
Keywords: soft robotics, underwater grasping, octopus-inspired design, tactile sensing, autonomous manipulation