Clear Sky Science · zh
用于三自由度机械臂的鲁棒与智能控制策略:一项比较研究
为何机器人控制关系到日常生活
从汽车工厂到医疗器械,许多设备依赖必须快速且精确运动、且不会晃动或错过目标的机械臂。本研究考察了三种常见的方式来控制一台三铰接机械臂沿路径运动,并比较它们的实际表现。理解哪种方法更精确、更可靠,有助于工程师设计出更安全、更平稳、更高效的机器人,从而在现实任务中更好地协助人类。
三种机械臂的控制办法
研究者以一台简单但具有代表性的机器人为对象:一台平面内可摆动三节连杆的机械臂,类似人类的肩、肘、腕在平面中的运动。他们比较三类将位置指令转换为关节力矩的控制器。第一类是PID控制,因设计与调试简便长期被工业广泛采用。第二类是模糊逻辑控制,它用若干“如果—那么”规则模拟人类的推理,不需要机器人精确的数学模型。第三类是滑模控制,这是一种更先进的方案,刻意设计误差随时间收缩的方式,并旨在对干扰和不确定力具有较强的鲁棒性。
构建机械臂的真实数字孪生
为了使比较公平,团队首先建立了机械臂运动的详细数学描述。该模型包括连杆质量相互作用、一个关节的转动如何影响其他关节、重力对每个连杆的作用以及关节摩擦对运动的阻碍。随后他们在仿真环境中实现该模型,并与已发表的同类型机械臂结果进行对照。通过指令关节跟随平滑且有偏移的正弦波并将所得运动与先前研究比较,结果显示他们的仿真臂在速度、振幅和时序上几乎一致,从而增强了后续控制器测试的现实可信度。
三种控制器在运动中的表现
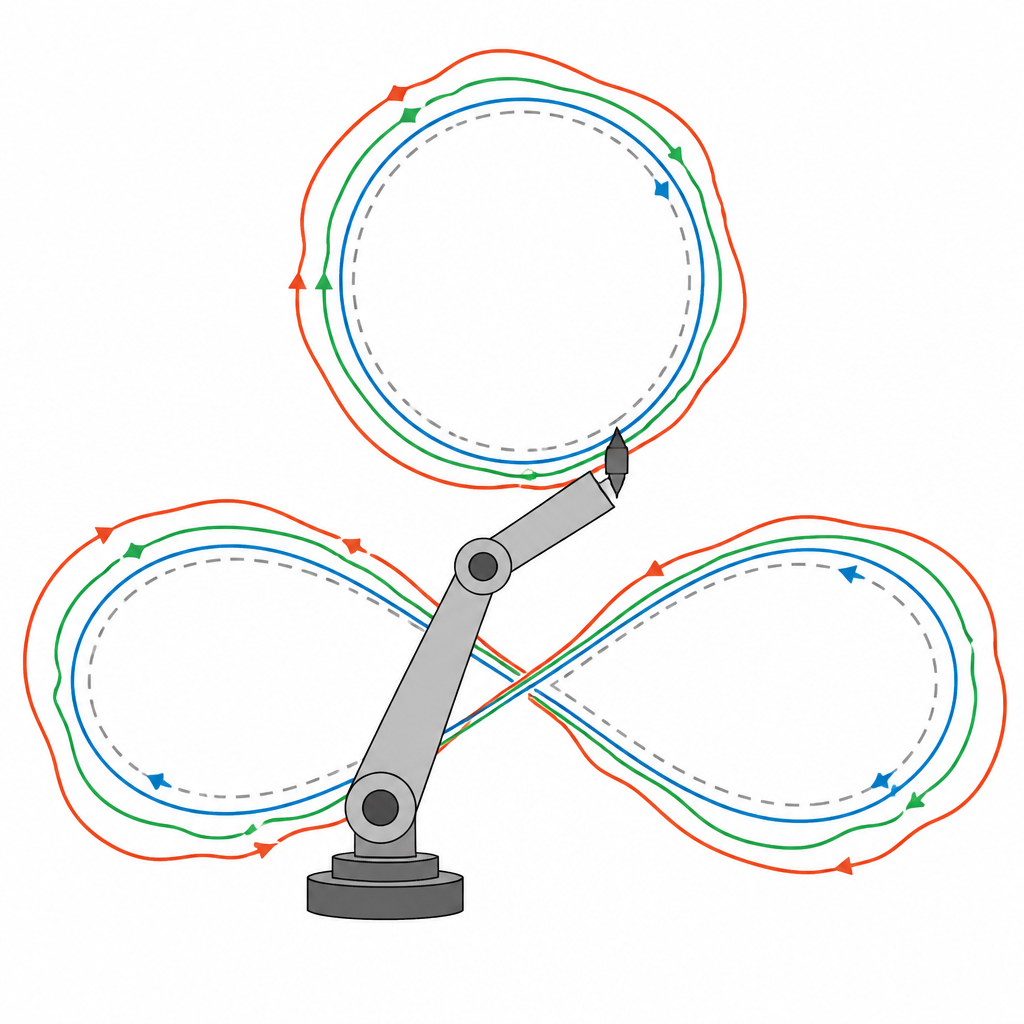
在建立了数字孪生之后,三种控制器在相同任务上进行测试。首先,每个关节被要求跳到一个新角度并稳定在该位置。三种方法最终都能到达目标,但PID控制会超调且需要最长时间才能平稳。模糊逻辑显著减少了超调并使响应更平滑,尽管在某些情况下速度可能会略慢。滑模控制响应最快,且在三关节上几乎没有超调便可稳定。接着,团队让机械臂末端描绘更复杂的形状,包括八字曲线和圆形,这些代表了要求较高的工业运动。同样地,PID落后且偏离轨迹最远,模糊逻辑改进了路径跟随,而滑模控制在位置和速度上都能使末端最接近期望轨迹。
用数字说明完整结论
为超越视觉图像,研究使用了标准误差度量来捕捉机械臂偏离预定运动的幅度、持续时间和持久性。这些度量显示出明确的层次关系。平均而言,与PID相比,模糊逻辑将位置误差约减半,而滑模控制则将误差约减少五分之四。在误差随时间衰减的速度和波动幅度上也呈现相同模式。例如,在描绘圆形路径时,PID的最差位置偏差约为十分之一米,模糊逻辑将其缩小到几厘米,而滑模控制将偏差控制在仅几毫米。对最大误差、平均误差及随时间的分布进行统计分析后,结果证实滑模控制始终在精度和稳定性上最优,模糊逻辑居中,PID居末。
这对未来机器人的意义
研究得出结论:尽管熟悉的PID方法仍能使机械臂稳定,但在路径要求严格、负载变化或运动速度较快时并非最佳选择。模糊逻辑在不需详细模型的情况下提供了颇具吸引力的精度提升,但它依赖经验驱动的精心调参。滑模控制在采用平滑切换律以避免过度抖振时,能在所有测试中提供最尖锐的跟踪与最快的稳定性能。对于在工厂或研究实验室设计平面机械臂的工程师而言,这些发现表明:投资于鲁棒非线性控制可以在摩擦、关节耦合与外部扰动存在时,显著提升运动的精度与可靠性,尤其是在机器人必须沿复杂轨迹运行时。
引用: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
关键词: 机械臂控制, 轨迹跟踪, 滑模控制, 模糊逻辑控制, PID 控制器