Clear Sky Science · en
Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study
Why robot control matters for everyday life
From car factories to medical devices, many machines rely on robotic arms that must move quickly and precisely without wobbling or missing their targets. This study looks at three common ways to tell a three-jointed robotic arm how to move along a path and compares how well they work. Understanding which method is more accurate and reliable helps engineers build safer, smoother, and more efficient robots that can better assist people in real-world tasks.
Three ways to steer a robotic arm
The researchers focus on a simple but representative robot: a flat, three-link arm that can swing each joint, much like a human shoulder, elbow, and wrist moving in a plane. They compare three families of controllers that turn position commands into joint torques. The first, PID control, is the long-time workhorse of industry because it is easy to design and tune. The second, fuzzy logic control, imitates human reasoning using if–then rules, without needing a detailed math model of the robot. The third, sliding mode control, is a more advanced scheme that deliberately shapes how errors shrink over time and is designed to be tough against disturbances and uncertain forces acting on the arm.
Building a realistic digital twin of the arm
To make the comparison fair, the team first builds a detailed mathematical description of how the robotic arm moves. This model includes how the links’ masses interact, how rotation at one joint affects the others, how gravity pulls on each link, and how friction resists motion at the joints. They then implement this model in a simulation environment and check it against published results for the same type of manipulator. By commanding the robot joints to follow smooth, offset sine waves and comparing the resulting motions with earlier studies, they show that their simulated arm behaves nearly identically in speed, amplitude, and timing, giving confidence that later controller tests are realistic.
How the three controllers behave in motion
With the digital twin in place, all three controllers are tested on the same tasks. First, each joint is asked to jump to a new angle and settle there. All methods eventually reach the target, but PID control overshoots the goal and takes the longest time to calm down. Fuzzy logic greatly cuts down the overshoot and smooths the response, though it can be slightly slower in some cases. Sliding mode control responds the fastest and comes to rest with almost no overshoot on all three joints. Next, the team commands the arm’s tip to trace more complex shapes, including a figure-eight curve and a circle, which are representative of demanding industrial motions. Again, PID lags and strays furthest from the path, fuzzy logic improves the path following, and sliding mode control keeps the tip closest to the desired route in both position and speed.
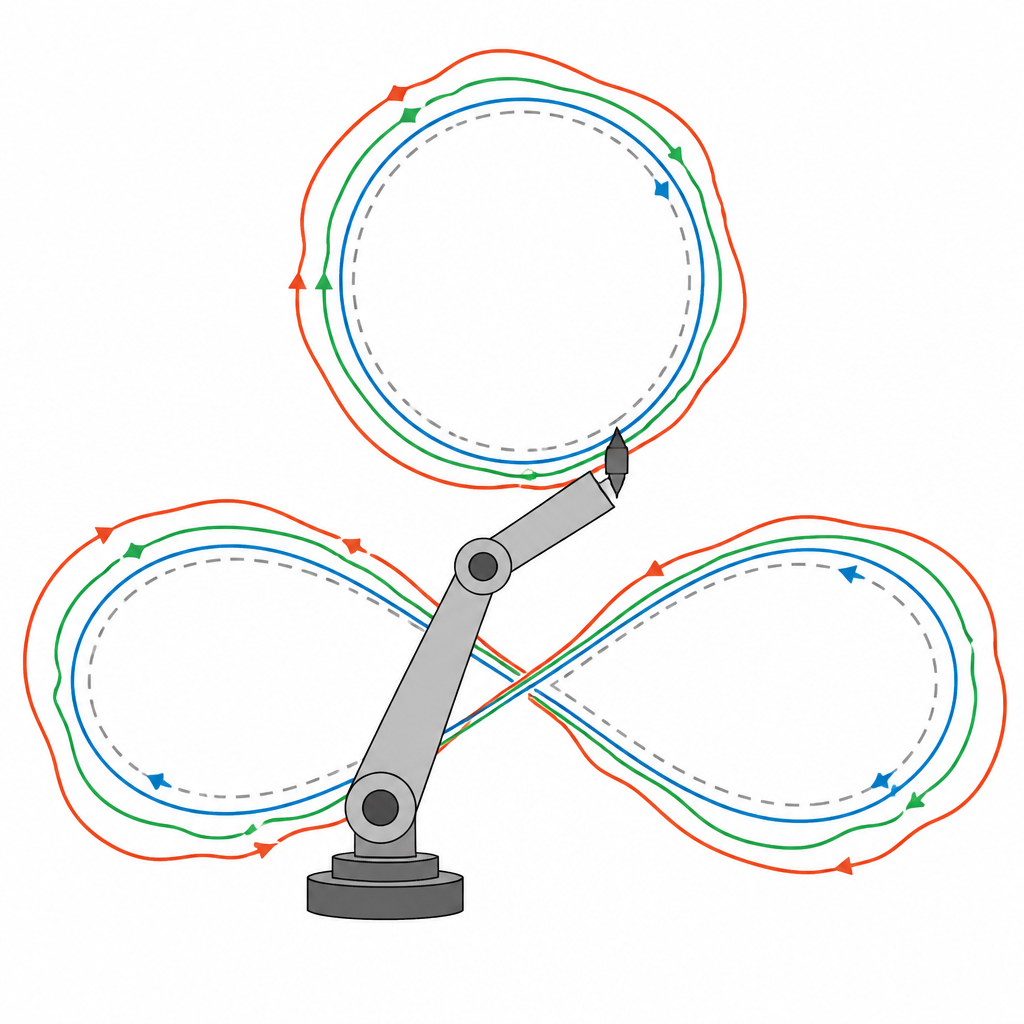
Numbers that tell the full story
To move beyond visual plots, the study uses standard error measures that capture how far, how long, and how persistently the arm drifts from its intended motion. These measures show a clear hierarchy. On average, fuzzy logic cuts position errors roughly in half compared with PID, and sliding mode control reduces them by about four fifths. The same pattern appears when looking at how quickly errors die out over time and how much they fluctuate. When the arm traces the circular path, for example, the worst-case position miss for PID reaches around a tenth of a meter, fuzzy logic shrinks that to a few centimeters, and sliding mode control keeps the miss to only a few millimeters. A statistical look at maximum error, average error, and spread over time confirms that sliding mode control is consistently the most accurate and stable, with fuzzy logic in the middle and PID last.
What this means for future robots
The study concludes that while the familiar PID approach can still stabilize a robotic arm, it is not the best choice when paths are tight, loads change, or motion is fast. Fuzzy logic offers an attractive step up in accuracy without requiring a detailed model, but it relies on careful, experience-based tuning. Sliding mode control, when implemented with a smooth switching law to avoid excessive chattering, provides the sharpest tracking and fastest settling across all tests. For engineers designing planar robotic arms in factories or research labs, these findings suggest that investing in robust nonlinear control can yield much more precise and reliable motion, especially when the robot must follow intricate trajectories in the face of friction, coupling between joints, and external disturbances.
Citation: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Keywords: robotic arm control, trajectory tracking, sliding mode control, fuzzy logic control, PID controller