Clear Sky Science · ar
استراتيجيات تحكم ذكية ومتينة لذراع روبوتية ذات ثلاث درجات حرية: دراسة مقارنة
لماذا يهمّ التحكم في الروبوتات في حياتنا اليومية
من مصانع السيارات إلى الأجهزة الطبية، تعتمد العديد من الآلات على أذرع روبوتية يجب أن تتحرك بسرعة ودقة دون اهتزاز أو فشل في بلوغ الأهداف. تدرس هذه الورقة ثلاث طرق شائعة لإرشاد ذراع روبوتية ثلاثية المفاصل على طول مسار وتُقارن أداءها. يساعد فهم أي طريقة أكثر دقة وموثوقية المهندسين على بناء روبوتات أكثر أمانًا وسلاسة وكفاءة لتقديم مساعدة أفضل في مهام العالم الحقيقي.
ثلاث طرق لتوجيه ذراع روبوتية
يركّز الباحثون على روبوت بسيط لكنه تمثيلي: ذراع مسطحة مكوّنة من ثلاثة أجزاء يمكن لكل مفصل فيها التأرجح، تمامًا ككتف ومرفق ومعصم الإنسان يتحركان في مستوى واحد. يقارنون ثلاث عائلات من المتحكمات التي تحول أوامر الموضع إلى عزوم مفصلية. الأول، تحكم PID، هو ركيزة الصناعة منذ زمن لأنه سهل التصميم والمعايرة. الثاني، التحكم بالمنطق الضبابي، يحاكي التفكير البشري باستخدام قواعد من نوع إذا–فإن، دون الحاجة لنموذج رياضي مفصّل للروبوت. الثالث، التحكم بطريقة الانزلاق، هو مخطط أكثر تقدمًا يصمّم صراحة كيفية تقلص الأخطاء مع الزمن ومصمم ليكون قويًا أمام الاضطرابات والقوى غير المؤكدة المؤثرة على الذراع.
بناء توأم رقمي واقعي للذراع
لجعل المقارنة عادلة، يبني الفريق أولًا وصفًا رياضيًا مفصلاً لحركة الذراع الروبوتية. يشمل هذا النموذج كيفية تفاعل كتل الأجزاء، وكيف تؤثر الدوران في مفصل واحد على الأخرى، وكيف تجذب الجاذبية كل جزء، وكيف يقاوم الاحتكاك الحركة عند المفاصل. ثم يُنفّذون هذا النموذج في بيئة محاكاة ويتحققون منه مقابل نتائج منشورة لنفس نوع المِمَسّك. من خلال إصدار أوامر لمفاصل الروبوت لتتبع موجات جيبية مزيحة وناعمة ومقارنة الحركات الناتجة مع دراسات سابقة، يُظهرون أن الذراع المحاكاة تتصرف بشكل يكاد يكون مطابقًا في السرعة والسعة والتوقيت، ما يمنح ثقة بأن اختبارات المتحكمات لاحقًا واقعية.
كيف تتصرف المتحكمات الثلاثة أثناء الحركة
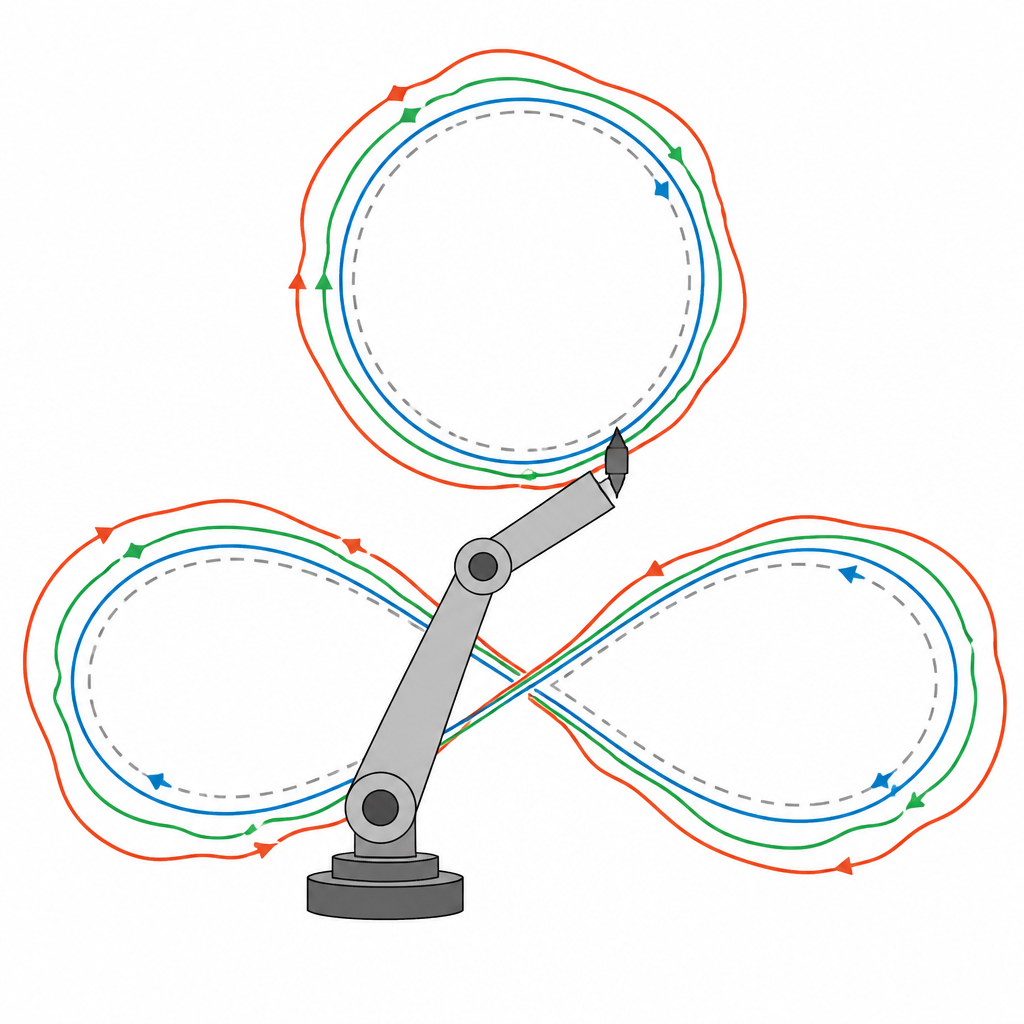
مع وجود التوأم الرقمي، تُختبر المتحكمات الثلاثة على نفس المهام. أولًا، يُطلب من كل مفصل القفز إلى زاوية جديدة والاستقرار هناك. تصل كل الطرق في نهاية المطاف إلى الهدف، لكن تحكم PID يتجاوز الهدف ويستغرق أطول زمن للهدوء. يقلّل التحكم بالمنطق الضبابي كثيرًا من التجاوز ويُطرّي الاستجابة، رغم أنه قد يكون أبطأ قليلاً في بعض الحالات. يستجيب التحكم بطريقة الانزلاق بأسرع شكل ويستقر مع تقلّب تكاد تكون منعدمة في الثلاثة مفاصل. بعد ذلك، يأمر الفريق رأس الذراع بتتبع أشكال أكثر تعقيدًا، بما في ذلك منحنى شكل ثمانية ودائرة، والتي تمثل حركات صناعية مطلوبة. مرة أخرى، يتخلف PID وينحرف أبعد عن المسار، يحسّن المنطق الضبابي متابعة المسار، ويحافظ التحكم بطريقة الانزلاق على اقتراب الرأس من المسار المطلوب في كل من الموضع والسرعة.
أرقام تروي القصة كاملة
للانتقال إلى ما وراء الرسوم البيانية البصرية، تستخدم الدراسة مقاييس خطأ معيارية تلتقط مدى وبعد واستمرارية انحراف الذراع عن حركته المقصودة. تُظهر هذه المقاييس ترتيبًا واضحًا. في المتوسط، يخفض المنطق الضبابي أخطاء الموضع بحوالي النصف مقارنةً بـ PID، ويقلّص التحكم بطريقة الانزلاق هذه الأخطاء بحوالي أربعة أخماس. يظهر نفس النمط عند النظر إلى سرعة انعدام الأخطاء مع الزمن ومدى تذبذبها. عندما تتبع الذراع المسار الدائري، على سبيل المثال، يصل أسوأ انحراف في الموضع مع PID إلى نحو عُشر متر، يُقلّص المنطق الضبابي ذلك إلى بضعة سنتيمترات، ويحافظ التحكم بطريقة الانزلاق على انحراف لا يتجاوز بضعة مليمترات. يؤكد تحليل إحصائي لأقصى خطأ، ومتوسط الخطأ، وانتشاره مع الزمن أن التحكم بطريقة الانزلاق هو الأكثر دقة وثباتًا باستمرار، يليه المنطق الضبابي في المرتبة الوسطى ثم PID في الأخير.
ما يعنيه هذا لروبوتات المستقبل
تستنتج الدراسة أنه بينما يمكن لنهج PID المألوف أن يثبت الذراع الروبوتية، فهو ليس الخيار الأمثل عندما تكون المسارات ضيقة أو تتغير الحمولات أو تكون الحركة سريعة. يقدم المنطق الضبابي قفزة جذابة في الدقة دون الحاجة إلى نموذج مفصّل، لكنه يعتمد على معايرة دقيقة وخبرية. يوفر التحكم بطريقة الانزلاق، عند تنفيذه بقانون تبديل ناعم لتجنّب الاهتزاز المفرط، أدق تتبُّع وأسرع استقرار عبر جميع الاختبارات. بالنسبة للمهندسين الذين يصمّمون أذرعًا روبوتية مستوية في المصانع أو المختبرات البحثية، تشير هذه النتائج إلى أن الاستثمار في تحكم غير خطي قوي يمكن أن يوفّر حركة أكثر دقة وموثوقية بكثير، خصوصًا عندما يتعين على الروبوت اتباع مسارات معقدة في مواجهة الاحتكاك، والتشابك بين المفاصل، والاضطرابات الخارجية.
الاستشهاد: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
الكلمات المفتاحية: تحكم ذراع روبوتية, تتبُّع المسار, تحكم بطريقة الانزلاق, تحكم بالمنطق الضبابي, متحكم PID