Clear Sky Science · es
Estrategias de control robustas e inteligentes para un brazo robótico de 3 GDL: un estudio comparativo
Por qué importa el control de robots en la vida cotidiana
Desde fábricas de automóviles hasta dispositivos médicos, muchas máquinas dependen de brazos robóticos que deben moverse con rapidez y precisión sin temblores ni fallos de objetivo. Este estudio examina tres formas comunes de indicar a un brazo robótico de tres articulaciones cómo moverse a lo largo de una trayectoria y compara su rendimiento. Comprender qué método es más preciso y fiable ayuda a los ingenieros a construir robots más seguros, suaves y eficientes que puedan asistir mejor a las personas en tareas reales.
Tres formas de dirigir un brazo robótico
Los investigadores se centran en un robot simple pero representativo: un brazo plano de tres eslabones que puede girar cada articulación, similar a hombro, codo y muñeca humanos moviéndose en un plano. Comparan tres familias de controladores que convierten comandos de posición en torques en las articulaciones. El primero, el control PID, es el caballo de batalla industrial por su facilidad de diseño y ajuste. El segundo, el control por lógica difusa, imita el razonamiento humano mediante reglas if–then, sin necesitar un modelo matemático detallado del robot. El tercero, el control por modo deslizante, es un esquema más avanzado que moldea deliberadamente cómo decrecen los errores en el tiempo y está diseñado para ser resistente frente a perturbaciones e incertidumbres que actúan sobre el brazo.
Construyendo un gemelo digital realista del brazo
Para que la comparación sea justa, el equipo primero construye una descripción matemática detallada del movimiento del brazo robótico. Este modelo incluye cómo interactúan las masas de los eslabones, cómo la rotación en una articulación afecta a las otras, cómo la gravedad actúa sobre cada eslabón y cómo la fricción resiste el movimiento en las articulaciones. A continuación implementan este modelo en un entorno de simulación y lo contrastan con resultados publicados para el mismo tipo de manipulador. Al ordenar a las articulaciones del robot que sigan ondas senoales suavizadas y desfasadas y comparar los movimientos resultantes con estudios previos, muestran que su brazo simulado se comporta casi idénticamente en velocidad, amplitud y temporización, lo que da confianza en que las pruebas posteriores de los controladores son realistas.
Cómo se comportan los tres controladores en movimiento
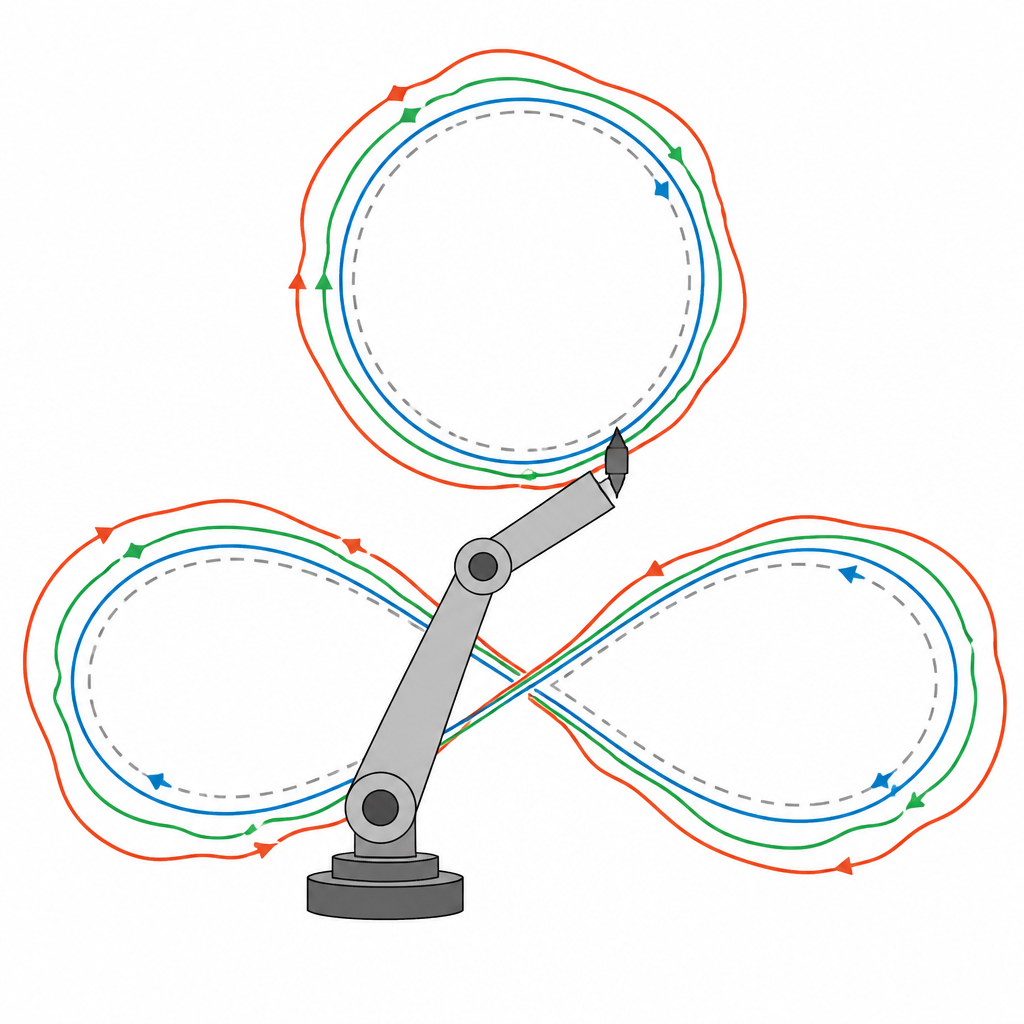
Con el gemelo digital en marcha, se prueban los tres controladores en las mismas tareas. Primero, se pide a cada articulación que salte a un nuevo ángulo y se estabilice allí. Todos los métodos alcanzan finalmente el objetivo, pero el PID sobreactúa el objetivo y tarda más en asentarse. La lógica difusa reduce considerablemente el sobreimpulso y suaviza la respuesta, aunque en algunos casos puede ser algo más lenta. El control por modo deslizante responde más rápido y se detiene con casi ningún sobreimpulso en las tres articulaciones. A continuación, el equipo ordena a la punta del brazo que trace formas más complejas, incluyendo una curva en ocho y un círculo, representativas de movimientos industriales exigentes. De nuevo, el PID queda rezagado y se desvía más de la trayectoria, la lógica difusa mejora el seguimiento, y el control por modo deslizante mantiene la punta más cercana a la ruta deseada tanto en posición como en velocidad.
Cifras que cuentan la historia completa
Para ir más allá de los gráficos visuales, el estudio utiliza medidas de error estándar que capturan cuánto, cuánto tiempo y con qué persistencia el brazo se desvía de su movimiento previsto. Estas medidas muestran una jerarquía clara. En promedio, la lógica difusa reduce los errores de posición aproximadamente a la mitad en comparación con PID, y el control por modo deslizante los reduce en cerca de cuatro quintas partes. El mismo patrón aparece al observar la rapidez con que los errores se amortiguan en el tiempo y cuánto fluctúan. Cuando el brazo traza la trayectoria circular, por ejemplo, el peor fallo de posición con PID alcanza alrededor de una décima de metro, la lógica difusa lo reduce a unos pocos centímetros y el control por modo deslizante mantiene la desviación en solo unos pocos milímetros. Un análisis estadístico del error máximo, el error medio y la dispersión temporal confirma que el control por modo deslizante es consistentemente el más preciso y estable, con la lógica difusa en segundo lugar y el PID en último.
Qué significa esto para los robots del futuro
El estudio concluye que, aunque el enfoque conocido del PID todavía puede estabilizar un brazo robótico, no es la mejor opción cuando las trayectorias son estrechas, las cargas cambian o el movimiento es rápido. La lógica difusa ofrece un salto atractivo en precisión sin requerir un modelo detallado, pero depende de un ajuste cuidadoso basado en la experiencia. El control por modo deslizante, cuando se implementa con una ley de conmutación suavizada para evitar un chatter excesivo, proporciona el seguimiento más preciso y el asentamiento más rápido en todas las pruebas. Para los ingenieros que diseñan brazos robóticos planos en fábricas o laboratorios, estos hallazgos sugieren que invertir en control no lineal robusto puede proporcionar movimientos mucho más precisos y fiables, especialmente cuando el robot debe seguir trayectorias complejas frente a fricción, acoplamientos entre articulaciones y perturbaciones externas.
Cita: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Palabras clave: control de brazos robóticos, seguimiento de trayectorias, control por modo deslizante, control por lógica difusa, controlador PID