Clear Sky Science · tr
3-DOF robot kolu için sağlam ve akıllı kontrol stratejileri: karşılaştırmalı bir çalışma
Neden robot kontrolü günlük yaşam için önemli
Otomobil fabrikalarından tıbbi cihazlara kadar birçok makine, hedeflerini titremeden ve kaçırmadan hızlı ve hassas şekilde hareket etmesi gereken robot kollara dayanır. Bu çalışma, üç eklemli bir robot koluna bir yol boyunca nasıl hareket etmesi gerektiğini söylemenin üç yaygın yolunu inceliyor ve bunların ne kadar iyi çalıştığını karşılaştırıyor. Hangi yöntemin daha doğru ve güvenilir olduğunu anlamak, mühendislerin gerçek dünya görevlerinde insanlara daha iyi yardımcı olabilecek, daha güvenli, daha pürüzsüz ve daha verimli robotlar tasarlamasına yardımcı olur.
Bir robot kolunu yönlendirmenin üç yolu
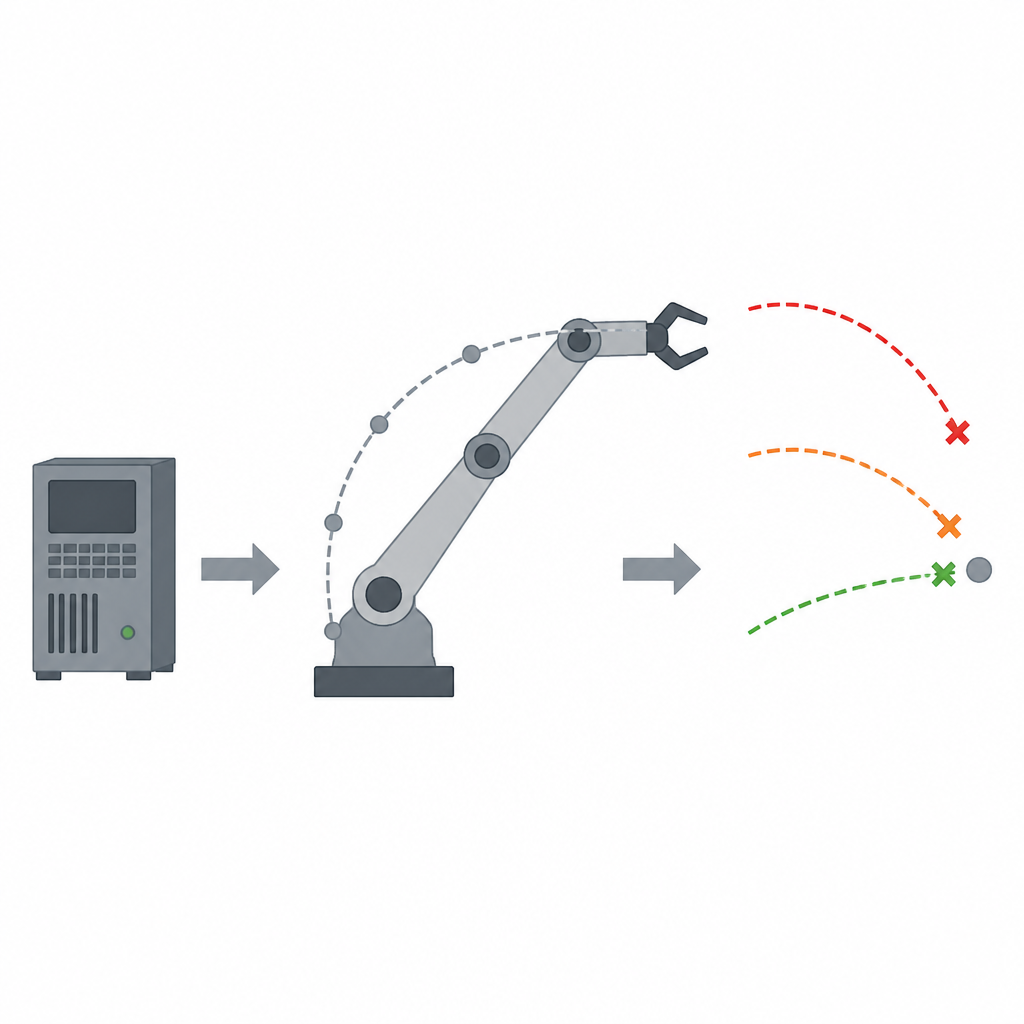
Araştırmacılar, bir düzlemde insan omuzu, dirseği ve bileği gibi hareket eden, her eklemi salınabilen düz bir üç bağlantılı kol gibi basit ama temsilî bir robot üzerinde odaklanıyor. Pozisyon komutlarını eklem torklarına çeviren üç kontrolör ailesini karşılaştırıyorlar. İlki olan PID kontrol, tasarımı ve ayarı kolay olduğu için uzun zamandır sanayinin vazgeçilmezi olmuştur. İkincisi, bulanık mantık kontrolü, robotun ayrıntılı bir matematiksel modeline ihtiyaç duymadan if–then kurallarıyla insan akıl yürütmesini taklit eder. Üçüncüsü, kayan mod kontrolü, hataların zaman içinde nasıl küçüleceğini kasıtlı olarak biçimlendiren ve kola etki eden bozulmalara ve belirsiz kuvvetlere karşı dayanıklı olacak şekilde tasarlanmış daha gelişmiş bir şemadır.
Kolun gerçekçi bir dijital ikizini oluşturmak
Karşılaştırmayı adil kılmak için ekip önce robot kolunun hareketini detaylı şekilde matematiksel olarak tanımlayan bir model oluşturur. Bu model, bağlantıların kütlelerinin nasıl etkileştiğini, bir eklemdeki dönüşün diğerlerini nasıl etkilediğini, yerçekiminin her bağlantıyı nasıl çektiğini ve sürtünmenin eklemlerde hareketi nasıl dirençle karşıladığını içerir. Ardından bu modeli bir simülasyon ortamında uygular ve aynı tip manipülatör için yayımlanmış sonuçlarla karşılaştırır. Robot eklemlerine düzgün, kaydırılmış sinüs dalgaları komutu verip ortaya çıkan hareketleri daha önceki çalışmalarla karşılaştırarak, simüle ettikleri kolun hız, genlik ve zamanlama bakımından neredeyse özdeş davrandığını gösterirler; bu da sonraki kontrolör testlerinin gerçekçi olduğuna güven verir.
Üç kontrolörün hareket halindeki davranışı
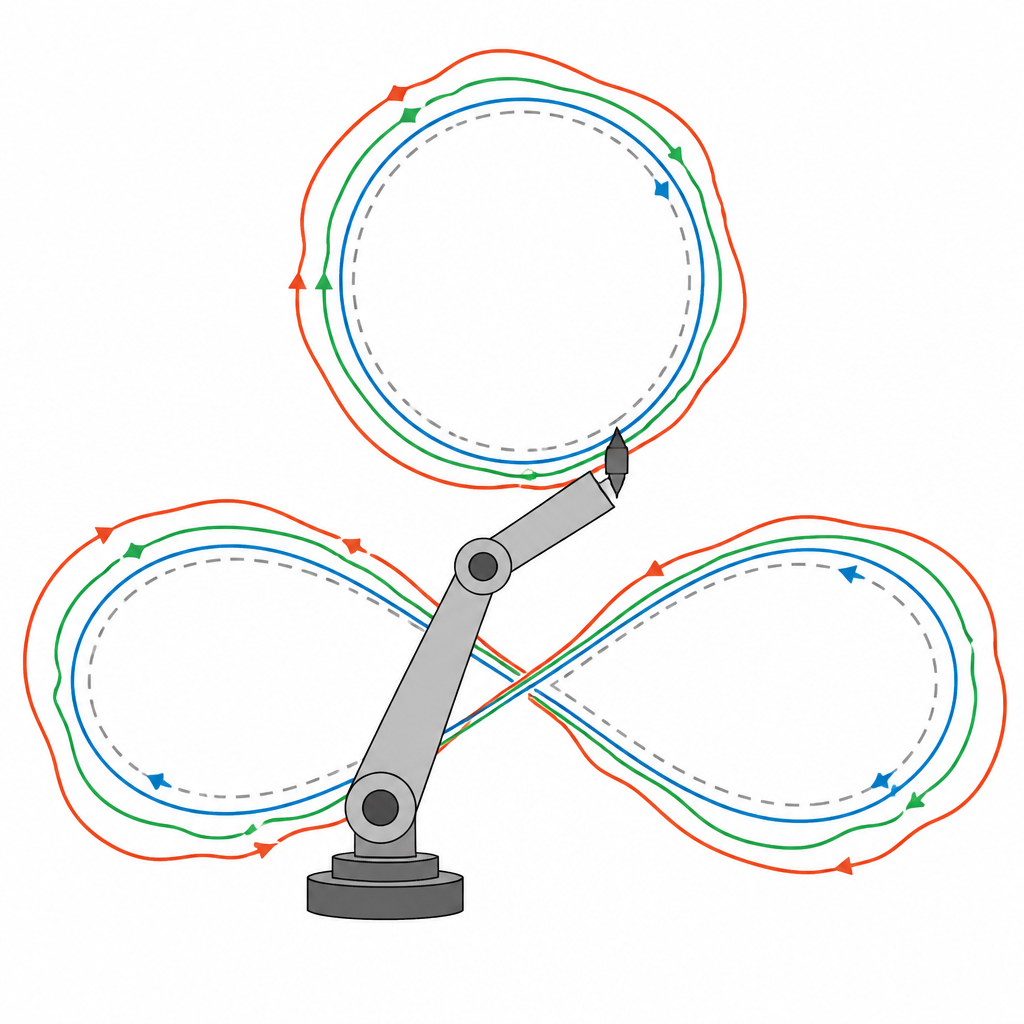
Dijital ikiz kurulduktan sonra üç kontrolör de aynı görevlerde test edilir. Önce her bir ekleme yeni bir açıya sıçrama yapması ve orada durması emri verilir. Tüm yöntemler sonunda hedefe ulaşır, ancak PID kontrol hedefi aşar ve sönümlenmesi en uzun süren olur. Bulanık mantık aşırı geçişi büyük ölçüde azaltır ve yanıtı yumuşatır, ancak bazı durumlarda biraz daha yavaş olabilir. Kayan mod kontrolü en hızlı yanıtı verir ve tüm üç eklemde neredeyse hiç aşım olmadan durur. Ardından ekip, kol ucuna sekiz ve daire gibi daha karmaşık şekilleri izlemesini komut eder; bunlar zorlu endüstriyel hareketleri temsil eder. Yine PID en çok geride kalır ve yolun en çok dışına çıkar, bulanık mantık yol takibini iyileştirir ve kayan mod kontrolü hem konum hem hız açısından ucu istenen rotaya en yakın tutar.
Tam hikâyeyi anlatan sayılar
Görsel grafikleri aşmak için çalışma, kolun hedeflenen hareketinden ne kadar, ne süreyle ve ne ölçüde sapma gösterdiğini yakalayan standart hata ölçülerini kullanır. Bu ölçüler açık bir hiyerarşi gösterir. Ortalama olarak bulanık mantık, PID ile karşılaştırıldığında konum hatalarını yaklaşık yarıya indirir ve kayan mod kontrolü bunları yaklaşık beşte dörde kadar azaltır. Hataların zaman içinde ne kadar çabuk yok olduğu ve ne kadar dalgalandığına bakıldığında da aynı desen görünür. Örneğin kol dairesel patikayı izlerken PID için en kötü durum konum hatası yaklaşık onda bir metreye ulaşırken, bulanık mantık bunu birkaç santimetreye küçültür ve kayan mod kontrolü hatayı sadece birkaç milimetreyle sınırlar. Maksimum hata, ortalama hata ve zaman içindeki yayılımın istatistiksel bir incelemesi, kayan mod kontrolünün tutarlı şekilde en doğru ve stabil olduğunu, bulanık mantığın ortada ve PID’nin en geride olduğunu doğrular.
Geleceğin robotları için bunun anlamı
Çalışma, tanıdık PID yaklaşımının bir robot kolunu hâlâ kararlı hale getirebileceğini, ancak yollar sıkı olduğunda, yükler değiştiğinde veya hareket hızlı olduğunda en iyi seçenek olmadığını sonuçlandırır. Bulanık mantık, ayrıntılı bir modele ihtiyaç duymadan doğrulukta çekici bir iyileşme sunar, ancak dikkatli, deneyime dayalı ayarlamaya bağımlıdır. Aşırı titreşimi önlemek için düzgün bir anahtarlama kanunu ile uygulandığında kayan mod kontrolü, tüm testlerde en keskin izlemeyi ve en hızlı sönümlemeyi sağlar. Fabrikalarda veya araştırma laboratuvarlarında düzlemsel robot kolları tasarlayan mühendisler için bu bulgular, sürtünme, eklemler arası bağıl etkiler ve dış bozulmalar karşısında karmaşık trajeler izlenmesi gerektiğinde sağlam doğrusal olmayan kontrole yatırım yapmanın çok daha hassas ve güvenilir hareket sağlayabileceğini öne sürer.
Atıf: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Anahtar kelimeler: robot kolu kontrolü, trajektori izleme, kayan mod kontrolü, bulanık mantık kontrolü, PID kontrolörü