Clear Sky Science · he
אסטרטגיות בקרה חזקות ואינטליגנטיות לזרוע רובוטית בעלת 3 דרגות חופש: מחקר השוואתי
מדוע בקרת רובוטים חשובה בחיי היומיום
ממפעלי רכב ועד מכשירים רפואיים, רבים מהמכונות מסתמכים על זרועות רובוטיות שצריכות לנוע במהירות ובדיוק ללא רעידות או החמצת היעד. מחקר זה בוחן שלוש דרכים נפוצות להורות לזרוע רובוטית בעלת שלוש מפרקים כיצד לנוע לאורך מסלול ומשווה עד כמה כל שיטה עובדת. הבנת איזו שיטה מדויקת ומהימנה יותר עוזרת למהנדסים לבנות רובוטים בטוחים, חלקים ויעילים יותר שיכולים לסייע טוב יותר במשימות בעולם האמיתי.
שלוש דרכים להנחות זרוע רובוטית
החוקרים מתמקדים ברובוט פשוט אך מייצג: זרוע שטוחה בת שלושה מקטעים שיכולה לסובב כל מפרק, בדומה לכתף, מרפק ושורש כף יד אנושיים הנעים במישור. הם משווים שלוש משפחות של בקרים שממירים פקודות מיקום למומנטים במפרקים. הראשונה, בקרה PID, היא כלי עבודה ותיק בתעשייה כי היא קלה לתכנון וכיול. השנייה, בקרה בלשון מטושטשת, מדמה חשיבה אנושית באמצעות כללי אם-אז, מבלי להזדקק למודל מתמטי מפורט של הרובוט. השלישית, בקרת מצב החלקה, היא שיטה מתקדמת שמעצבת בכוונה כיצד השגיאות מתכווצות לאורך זמן ומיועדת להיות עמידה בפני הפרעות וכוחות לא ודאיים הפועלים על הזרוע.
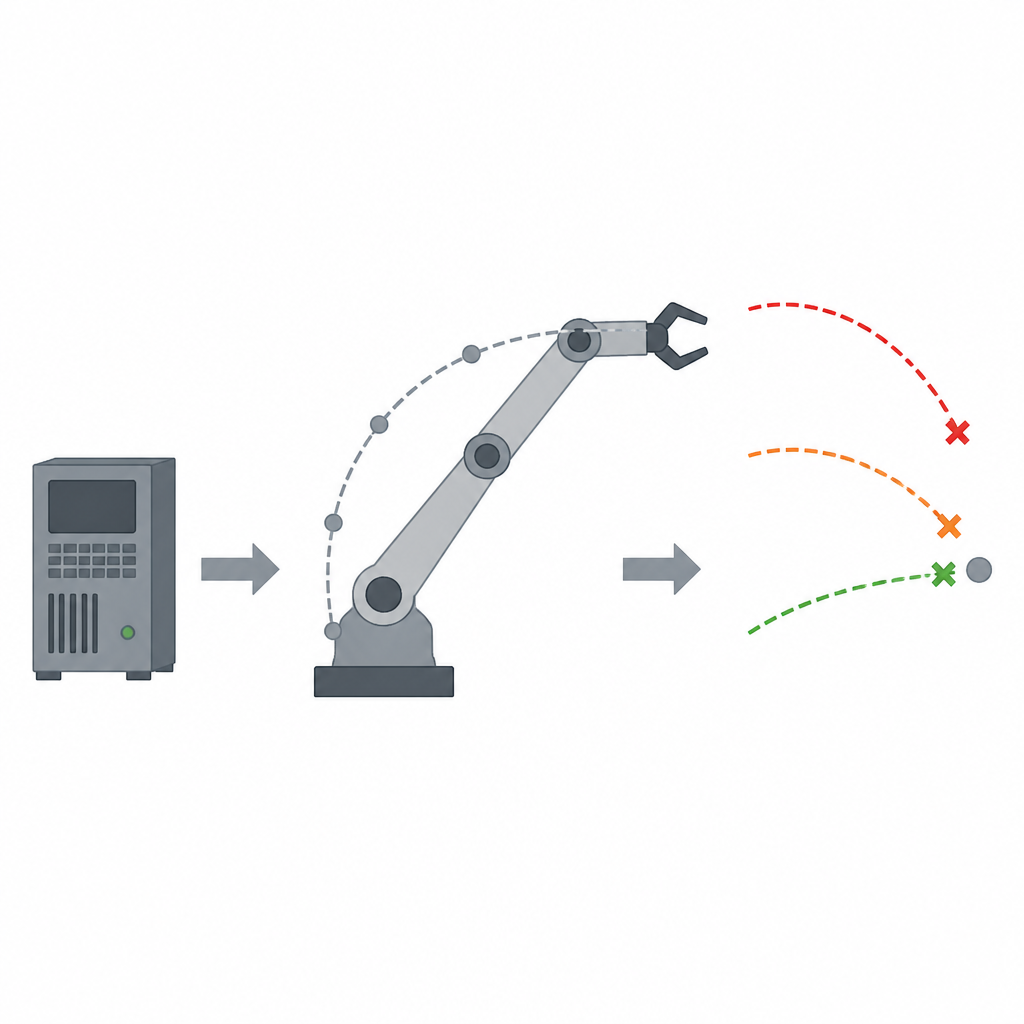
בניית תאום דיגיטלי ריאלי של הזרוע
כדי לבצע השוואה הוגנת, הצוות בונה תחילה תיאור מתמטי מפורט של אופן תנועת הזרוע הרובוטית. דגם זה כולל כיצד מסת המקטעים משפיעה, כיצד סיבוב במפרק אחד משפיע על האחרים, כיצד כוח הכבידה פועל על כל מקטע וכיצד החיכוך מתנגד לתנועה במפרקים. הם מממשים אחר כך את המודל בסביבת סימולציה ובודקים אותו מול תוצאות פורסמו עבור אותו סוג מניפולטור. על ידי פקודת המפרקים לעקוב אחרי גלי סינוס חלקים עם השהייה והשוואת התנועות שהתגלו למחקרים קודמים, הם מראים שהזרוע המדומה שלהם מתנהגת כמעט זהה במהירות, בעוצמה ובתזמון, מה שמעניק ביטחון שמבחני הבקר מאוחרים יהיו ריאליים.
כיצד השלושה מבקרים מתנהגים בתנועה
עם התאום הדיגיטלי במקום, כל שלושת הבקרים נבדקים על אותן משימות. תחילה נשאל כל מפרק לקפוץ לזווית חדשה ולהתייצב שם. כל השיטות בסופו של דבר מגיעות ליעד, אך בקרה PID עוקפת את המטרה ולוקחת את הזמן הארוך ביותר להירגע. הלוגיקה המטושטשת מקטינה משמעותית את הסטייה וממעכת את התגובה, אם כי היא עלולה להיות איטית במקצת במקרים מסוימים. בקרת מצב החלקה מגיבה המהירה ביותר ומתייצבת כמעט ללא עודף-הליכה על שלושת המפרקים. לאחר מכן, הצוות מורה לקצה הזרוע לעקוב אחרי צורות מסובכות יותר, כולל מסלול מספר-שמונה ומעגל, שהן דוגמאות לתנועות תעשייתיות תובעניות. שוב, PID מאחרת וסוטה הכי הרבה מהמסלול, הלוגיקה המטושטשת משפרת את המעקב אחרי המסלול, ובקרת מצב החלקה שומרת את הקצה הכי קרוב לנתיב הרצוי הן במיקום והן במהירות.
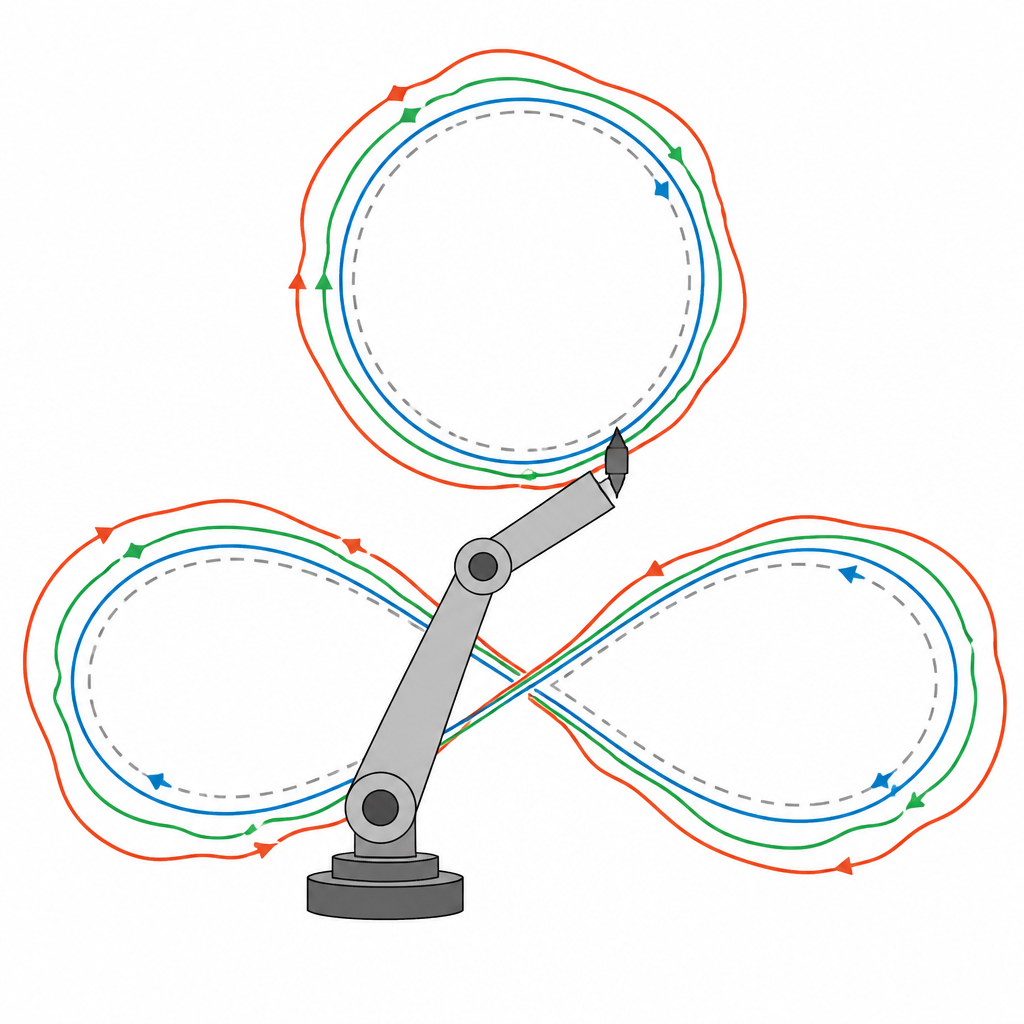
נתונים שמספרים את הסיפור המלא
כדי להתקדם מעבר לגרפים חזותיים, המחקר משתמש במדדי שגיאה סטנדרטיים שתופסים כמה רחוק, כמה זמן ועד כמה בעקביות הזרוע סוטה מהתנועה המיועדת. מדידות אלה מציגות היררכיה ברורה. בממוצע, הלוגיקה המטושטשת מקטינה את שגיאות המיקום בכמחצית בהשוואה ל-PID, ובקרת מצב החלקה מצמצמת אותן בכארבע חמישיות. אותו דפוס מופיע גם בבחינת קצב דעיכת השגיאות ובכמות התנודות שלהן. כאשר הזרוע עוקבת אחרי מסלול מעגלי, למשל, החטיאה במקרה הגרוע של PID מגיעה לכ-אחד עשירית מטר; הלוגיקה המטושטשת מקטינה זאת לכמה סנטימטרים, ובקרת מצב החלקה שומרת על החטיאה רק למילימטרים בודדים. מבט סטטיסטי על שגיאה מקסימלית, שגיאה ממוצעת וסטיית ערכים לאורך הזמן מאשר שבקרת מצב החלקה היא בעקביות המדויקת והיציבה ביותר, עם הלוגיקה המטושטשת באמצע ו-PID אחרונה.
מה משמעות הדבר עבור רובוטים עתידיים
המחקר מסכם שבעוד הגישה המוכרת של PID עדיין יכולה לייצב זרוע רובוטית, היא אינה הבחירה הטובה ביותר כאשר המסלולים צרים, העומסים משתנים או התנועה מהירה. הלוגיקה המטושטשת מציעה קפיצת מדרגה מפתה בדיוק ללא צורך במודל מפורט, אך היא תלויה בכיול קפדני המבוסס על ניסיון. בקרת מצב החלקה, כאשר מיישמים חוק החלפה חלק כדי להימנע מרעידות מופרזות, מספקת את המעקב החדה ביותר ואת ההתייצבות המהירה ביותר בכל הבדיקות. למהנדסים שמעצבים זרועות במישור במפעלי תעשייה או במעבדות מחקר, ממצאים אלה מציעים שהשקעה בבקרה לא-ליניארית חזקה יכולה להניב תנועה מדויקת ואמינה הרבה יותר, במיוחד כשהרובוט צריך לעקוב אחרי מסלולים מסובכים אל מול חיכוך, קישוריות בין מפרקים והפרעות חיצוניות.
ציטוט: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
מילות מפתח: בקרת זרוע רובוטית, מעקב תוואי, בקרת מצב החלקה, בקרת לוגיקה מטושטשת, בקר PID