Clear Sky Science · sv
Robusta och intelligenta styrstrategier för en 3-DOF robotarm: en jämförande studie
Varför robotstyrning spelar roll i vardagen
Från bilfabriker till medicinska apparater förlitar sig många maskiner på robotarmar som måste röra sig snabbt och precist utan att skaka eller missa målet. Denna studie undersöker tre vanliga sätt att styra hur en trelederad robotarm ska röra sig längs en bana och jämför hur väl de fungerar. Att förstå vilken metod som är mest exakt och pålitlig hjälper ingenjörer att bygga säkrare, mjukare och mer effektiva robotar som bättre kan assistera människor i verkliga uppgifter.
Tre sätt att styra en robotarm
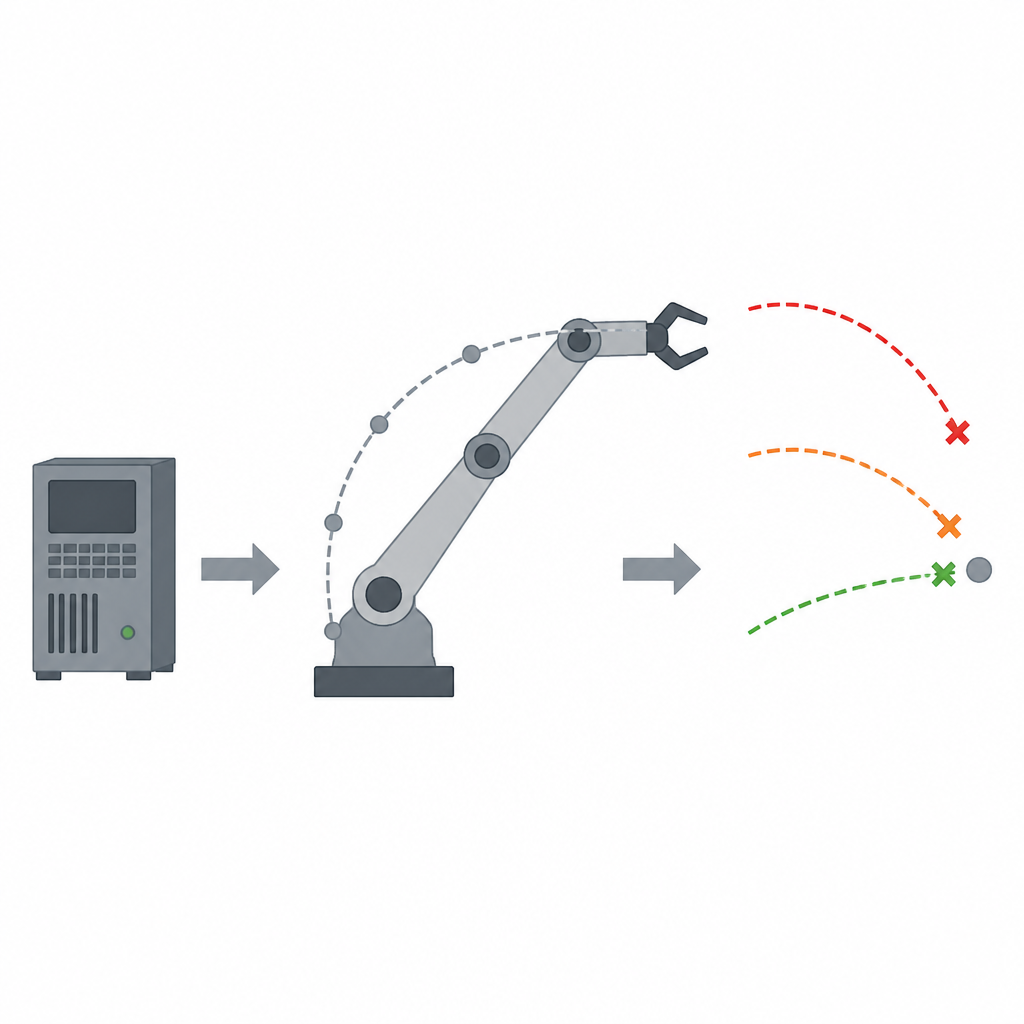
Forskarna fokuserar på en enkel men representativ robot: en plan, treledad arm som kan svänga varje led, ungefär som axel, armbåge och handled som rör sig i ett plan. De jämför tre familjer av regulatorer som omvandlar positionskommandon till ledmoment. Den första, PID-styrning, är industrins långlivade arbetshäst eftersom den är lätt att utforma och ställa in. Den andra, fuzzylogikstyrning, efterliknar mänskligt resonemang med if–then-regler utan att kräva en detaljerad matematisk modell av roboten. Den tredje, sliding mode-styrning, är ett mer avancerat upplägg som medvetet formar hur fel minskar över tiden och är utformat för att vara motståndskraftigt mot störningar och osäkra krafter som verkar på armen.
Att bygga en realistisk digital tvilling av armen
För att göra jämförelsen rättvis bygger teamet först en detaljerad matematisk beskrivning av hur robotarmen rör sig. Denna modell inkluderar hur länkarnas massor samverkar, hur rotation i en led påverkar de andra, hur tyngdkraften verkar på varje länk och hur friktion motverkar rörelse i lederna. De implementerar sedan modellen i en simuleringsmiljö och kontrollerar den mot publicerade resultat för samma typ av manipulator. Genom att låta robotlederna följa mjuka, förskjutna sinusvågor och jämföra de resulterande rörelserna med tidigare studier visar de att deras simulerade arm beter sig nästan identiskt i hastighet, amplitud och timing, vilket ger förtroende för att de efterföljande regulatorproven är realistiska.
Hur de tre regulatorerna beter sig i rörelse
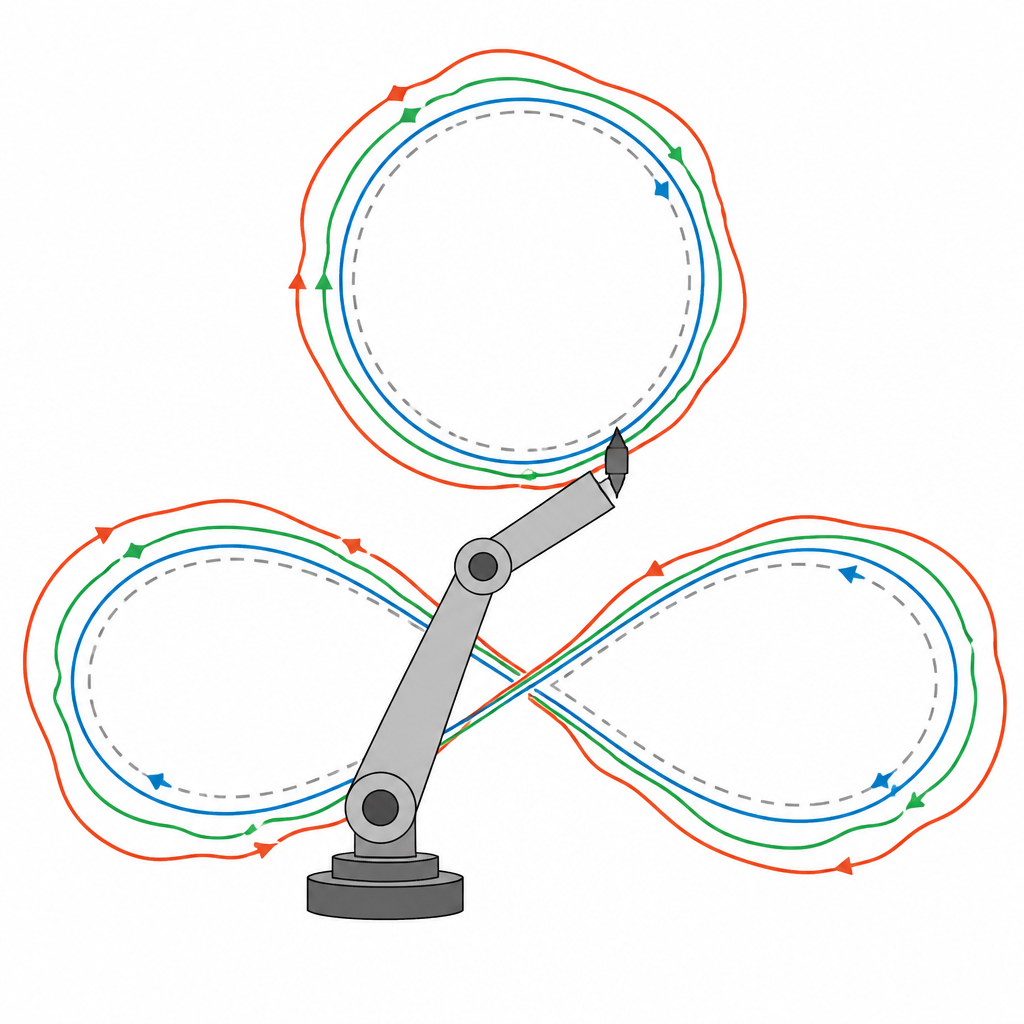
Med den digitala tvillingen på plats testas alla tre regulatorer på samma uppgifter. Först får varje led hoppa till en ny vinkel och stabilisera där. Alla metoder når så småningom målet, men PID-styrningen överskjuter målet och tar längst tid att lugna ner sig. Fuzzylogik minskar överskjutningen avsevärt och gör responsen mjukare, även om den i vissa fall kan vara något långsammare. Sliding mode-styrning reagerar snabbast och kommer till vila med nästan inget överskjutning på samtliga tre leder. Därefter kommenderar teamet armens spets att rita mer komplexa former, inklusive en åttaslinga och en cirkel, vilka är representativa för krävande industriella rörelser. Återigen halkar PID efter och avviker mest från banan, fuzzylogik förbättrar banföljningen, och sliding mode-styrning håller spetsen närmast önskad bana både i position och hastighet.
Siffror som berättar hela historien
För att gå bortom visuella diagram använder studien standardiserade felmått som fångar hur långt, hur länge och hur bestående armen driver iväg från sin avsedda rörelse. Dessa mått visar en tydlig hierarki. I genomsnitt halverar fuzzylogik positionsfelen ungefär jämfört med PID, och sliding mode-styrning minskar dem med omkring fyra femtedelar. Samma mönster syns när man ser hur snabbt felen dör ut över tiden och hur mycket de fluktuerar. När armen spårar den cirkulära banan når till exempel PID:s värsta positionsmiss ungefär en tiondels meter, fuzzylogik krymper det till några centimeter, och sliding mode-styrning håller missen till endast några millimeter. En statistisk genomgång av maxfel, medelfel och spridning över tid bekräftar att sliding mode-styrning konsekvent är mest exakt och stabil, med fuzzylogik i mitten och PID sist.
Vad detta betyder för framtidens robotar
Studien drar slutsatsen att även om den välkända PID-metoden fortfarande kan stabilisera en robotarm är den inte bästa valet när banor är snäva, laster varierar eller rörelser är snabba. Fuzzylogik erbjuder ett attraktivt steg upp i noggrannhet utan att kräva en detaljerad modell, men den förlitar sig på noggrann, erfarenhetsbaserad justering. Sliding mode-styrning, när den implementeras med en mjuk omskiftningslag för att undvika överdriven chattering, ger den skarpaste spårningen och snabbast dämpning i alla tester. För ingenjörer som utformar plana robotarmar i fabriker eller forskningslaboratorier tyder dessa resultat på att investering i robust icke-linjär styrning kan ge mycket mer precis och pålitlig rörelse, särskilt när roboten måste följa invecklade banor trots friktion, koppling mellan leder och externa störningar.
Citering: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Nyckelord: styrning av robotarm, trajektoriuppföljning, sliding mode-styrning, fuzzylogikstyrning, PID-regulator