Clear Sky Science · it
Strategie di controllo robuste e intelligenti per un braccio robotico a 3 gradi di libertà: uno studio comparativo
Perché il controllo dei robot conta nella vita quotidiana
Dalle fabbriche automobilistiche ai dispositivi medici, molte macchine si affidano a bracci robotici che devono muoversi rapidamente e con precisione, senza vibrazioni o errori di puntamento. Questo studio esamina tre modalità comuni per comandare il movimento di un braccio robotico a tre giunti e confronta la loro efficacia. Capire quale metodo è più accurato e affidabile aiuta gli ingegneri a costruire robot più sicuri, fluidi ed efficienti, in grado di assistere meglio le persone in compiti reali.
Tre modi per governare un braccio robotico
I ricercatori si concentrano su un robot semplice ma rappresentativo: un braccio piano a tre link che può ruotare ogni giunto, un po’ come spalla, gomito e polso che si muovono su un piano. Confrontano tre famiglie di controller che trasformano comandi di posizione in coppie ai giunti. Il primo, il controllo PID, è il cavallo di battaglia dell’industria perché è facile da progettare e tarare. Il secondo, il controllo a logica fuzzy, imita il ragionamento umano usando regole if–then, senza richiedere un modello matematico dettagliato del robot. Il terzo, il controllo a scorrimento, è uno schema più avanzato che modella deliberatamente come gli errori si riducono nel tempo ed è progettato per essere robusto contro disturbi e forze incerte che agiscono sul braccio.
Costruire un gemello digitale realistico del braccio
Per rendere il confronto equo, il team costruisce prima una descrizione matematica dettagliata del moto del braccio robotico. Questo modello include come interagiscono le masse dei link, come la rotazione in un giunto influenzi gli altri, come la gravità agisca su ogni link e come l’attrito opponga resistenza al movimento ai giunti. Implementano quindi il modello in un ambiente di simulazione e lo verificano rispetto a risultati pubblicati per lo stesso tipo di manipolatore. Comandando ai giunti del robot di seguire onde sinusoidali smussate e sfasate e confrontando i movimenti risultanti con studi precedenti, mostrano che il loro braccio simulato si comporta quasi identicamente in velocità, ampiezza e tempistica, dando fiducia che i successivi test dei controller siano realistici.
Come si comportano i tre controller in movimento
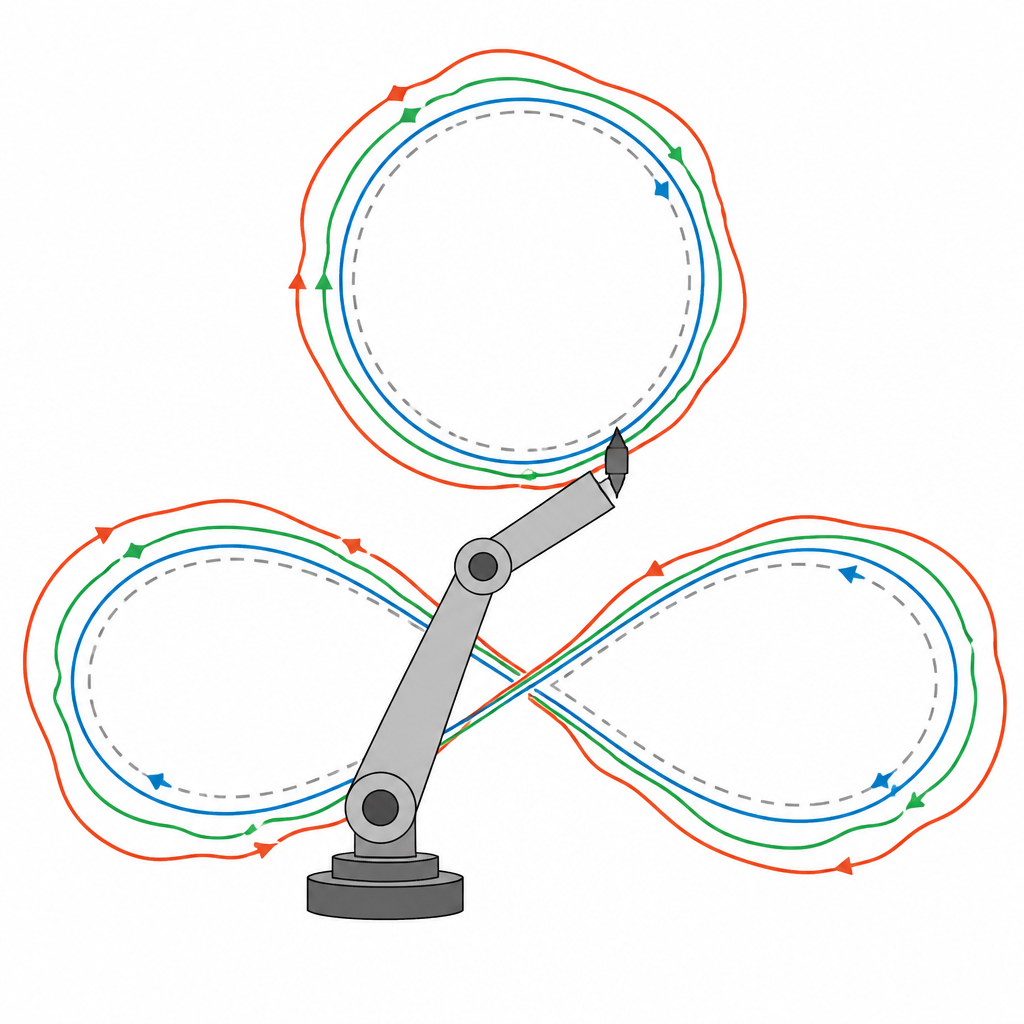
Con il gemello digitale a disposizione, tutti e tre i controller vengono testati sugli stessi compiti. Innanzitutto, a ogni giunto viene chiesto di saltare a un nuovo angolo e stabilizzarsi. Tutti i metodi raggiungono alla fine l’obiettivo, ma il controllo PID sovrammette il bersaglio e impiega più tempo a stabilizzarsi. La logica fuzzy riduce notevolmente il sovraelongazione e smussa la risposta, anche se in alcuni casi può risultare leggermente più lenta. Il controllo a scorrimento risponde più rapidamente e si arresta con quasi nessun sovraelongazione su tutti e tre i giunti. Successivamente, il team comanda alla punta del braccio di tracciare forme più complesse, tra cui una curva a otto e un cerchio, rappresentative di movimenti industriali impegnativi. Anche in questo caso, il PID resta indietro e devia maggiormente dalla traiettoria, la logica fuzzy migliora il follow della traiettoria e il controllo a scorrimento mantiene la punta più vicina alla rotta desiderata sia in posizione sia in velocità.
Numeri che raccontano l’intera storia
Per andare oltre i grafici visivi, lo studio utilizza misure di errore standard che catturano quanto, quanto a lungo e quanto persistentemente il braccio devia dal moto previsto. Queste misure mostrano una gerarchia chiara. In media, la logica fuzzy dimezza approssimativamente gli errori di posizione rispetto al PID, e il controllo a scorrimento li riduce di circa quattro quinti. Lo stesso schema si osserva guardando a quanto rapidamente gli errori si annullano nel tempo e quanto oscillano. Quando il braccio traccia il percorso circolare, per esempio, l’errore di posizione nel peggiore dei casi per il PID raggiunge circa un decimo di metro, la logica fuzzy lo riduce a pochi centimetri e il controllo a scorrimento mantiene l’errore a pochi millimetri. Un’analisi statistica dell’errore massimo, dell’errore medio e della dispersione nel tempo conferma che il controllo a scorrimento è sistematicamente il più accurato e stabile, con la logica fuzzy a metà strada e il PID ultimo.
Cosa significa questo per i robot del futuro
Lo studio conclude che, sebbene l’approccio PID familiare possa ancora stabilizzare un braccio robotico, non è la scelta migliore quando le traiettorie sono strette, i carichi variano o il movimento è veloce. La logica fuzzy offre un interessante miglioramento in termini di accuratezza senza richiedere un modello dettagliato, ma dipende da una taratura attenta basata sull’esperienza. Il controllo a scorrimento, se implementato con una legge di commutazione smussata per evitare eccessivi fenomeni di chattering, fornisce il tracking più preciso e i tempi di assestamento più rapidi in tutti i test. Per gli ingegneri che progettano bracci robotici planari in fabbriche o laboratori di ricerca, questi risultati suggeriscono che investire in controllo non lineare robusto può portare a movimenti molto più precisi e affidabili, specialmente quando il robot deve seguire traiettorie intricate in presenza di attrito, accoppiamento tra giunti e disturbi esterni.
Citazione: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Parole chiave: controllo braccio robotico, tracciamento traiettoria, controllo a scorrimento, controllo a logica fuzzy, controllore PID