Clear Sky Science · nl
Robuuste en intelligente regelstrategieën voor een 3-DOF robotarm: een vergelijkende studie
Waarom robotregeling ertoe doet in het dagelijks leven
Van autofabrieken tot medische apparatuur: veel machines vertrouwen op robotarmen die snel en precies moeten bewegen zonder te trillen of hun doel te missen. Deze studie bekijkt drie gangbare manieren om een driedelige robotarm langs een traject te sturen en vergelijkt hoe goed ze presteren. Inzicht in welke methode nauwkeuriger en betrouwbaarder is helpt ingenieurs veiliger, vloeiender en efficiënter robots te bouwen die mensen beter kunnen assisteren bij taken in de echte wereld.
Drie manieren om een robotarm te sturen
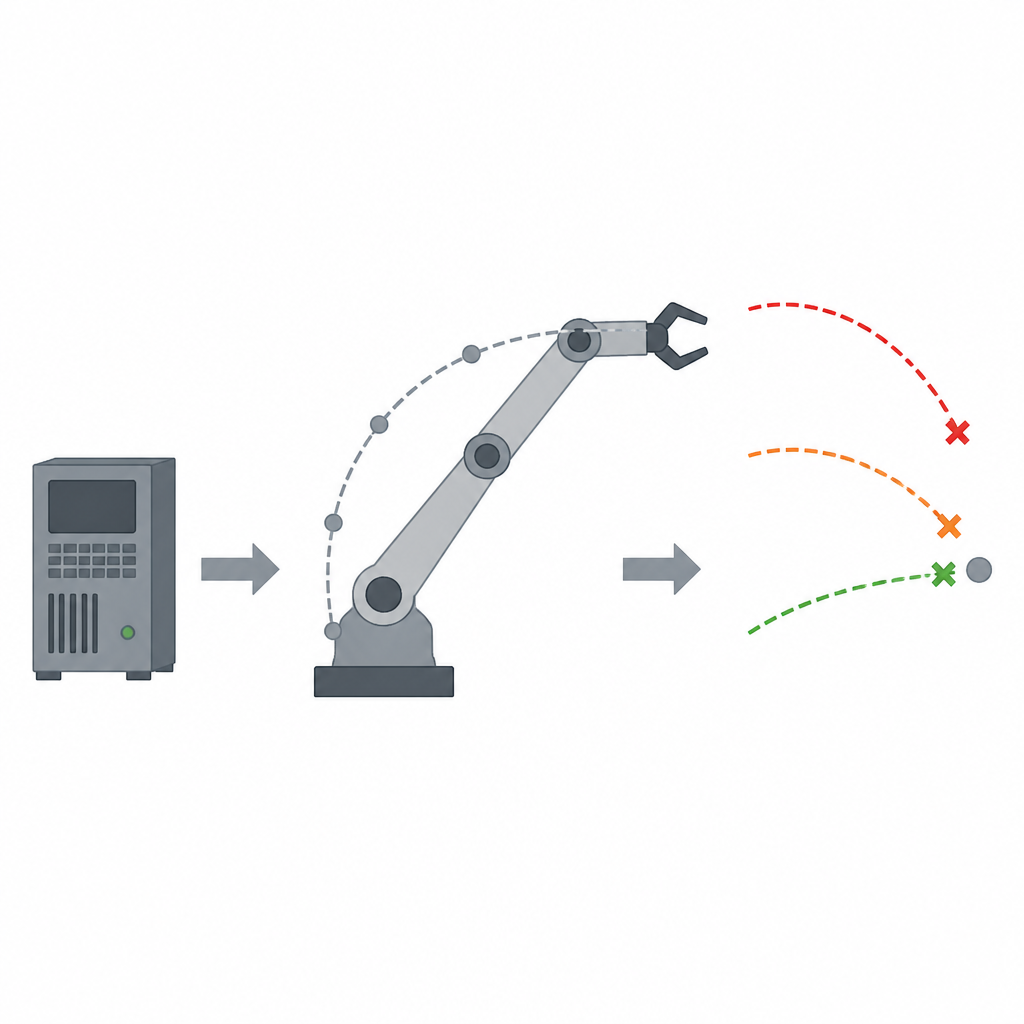
De onderzoekers concentreren zich op een eenvoudige maar representatieve robot: een vlakke arm met drie schakels die elk gewricht kan draaien, vergelijkbaar met schouder, elleboog en pols die in een vlak bewegen. Ze vergelijken drie families regelaars die positiocommandos omzetten in koppelopdrachten. De eerste, PID-regeling, is al lange tijd de werkpaard van de industrie omdat het eenvoudig te ontwerpen en af te stemmen is. De tweede, fuzzy-logica-regeling, bootst menselijk redeneren na met if–then-regels, zonder een gedetailleerd wiskundig model van de robot te vereisen. De derde, sliding-mode-regeling, is een geavanceerder schema dat doelbewust bepaalt hoe fouten in de loop van de tijd afnemen en is ontworpen om robuust te zijn tegen verstoringen en onzekere krachten die op de arm inwerken.
Het bouwen van een realistische digitale tweeling van de arm
Om de vergelijking eerlijk te maken bouwt het team eerst een gedetailleerde wiskundige beschrijving van hoe de robotarm beweegt. Dit model omvat hoe de massa van de schakels elkaar beïnvloedt, hoe rotatie in één gewricht de andere beïnvloedt, hoe de zwaartekracht op elke schakel werkt en hoe wrijving de beweging in de gewrichten tegenwerkt. Ze implementeren dit model vervolgens in een simulatieomgeving en vergelijken het met gepubliceerde resultaten voor hetzelfde type manipulator. Door de robotgewrichten commando’s te geven om vloeiende, verschoven sinusgolven te volgen en de resulterende bewegingen met eerdere studies te vergelijken, laten ze zien dat hun gesimuleerde arm bijna identiek presteert qua snelheid, amplitude en timing, wat vertrouwen geeft dat latere regelaarstests realistisch zijn.
Hoe de drie regelaars zich tijdens beweging gedragen
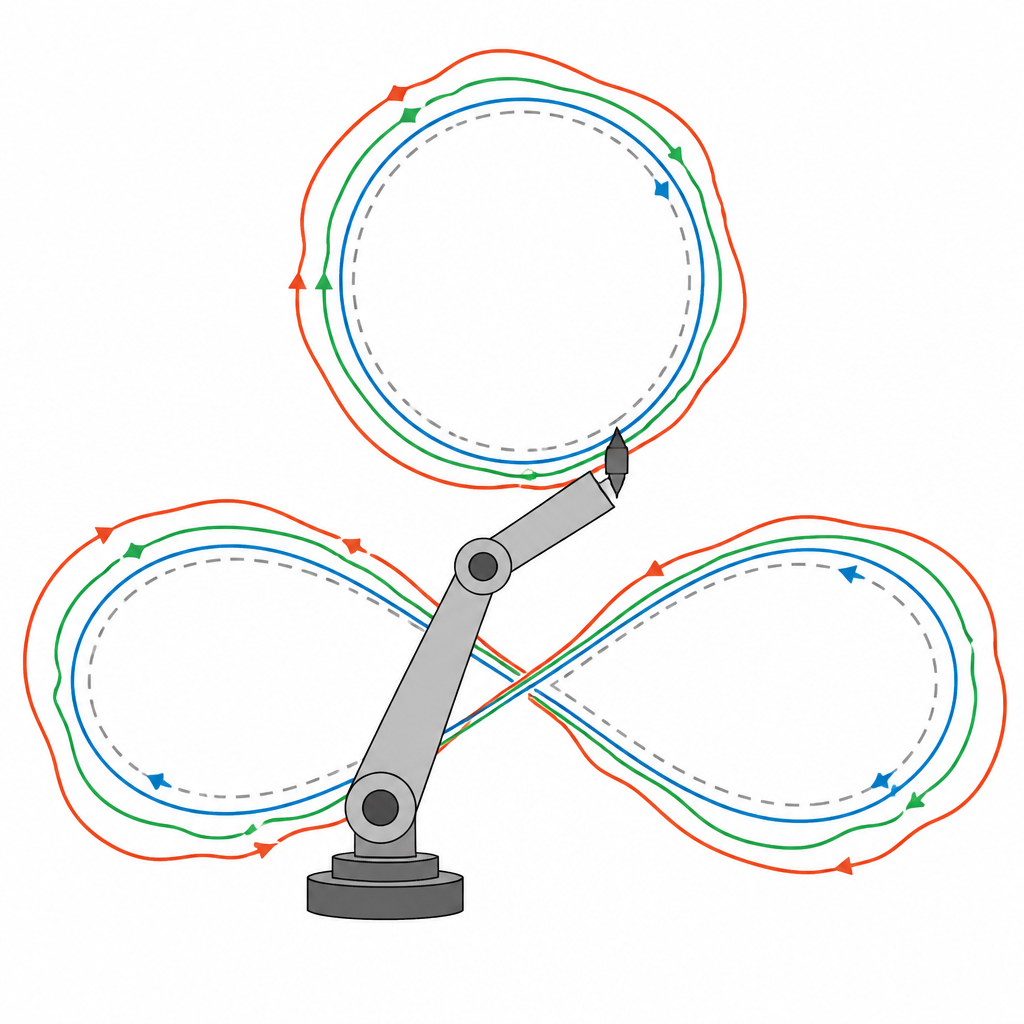
Met de digitale tweeling klaar worden alle drie regelaars getest op dezelfde taken. Eerst krijgt elk gewricht het commando om naar een nieuwe hoek te springen en daar te blijven. Alle methoden bereiken uiteindelijk het doel, maar PID-regeling overshoot en heeft de langste hersteltijd. Fuzzy-logica vermindert de overshoot aanzienlijk en maakt de respons vloeiender, hoewel het in sommige gevallen iets langzamer kan zijn. Sliding-mode-regeling reageert het snelst en komt in rust met vrijwel geen overshoot voor alle drie gewrichten. Vervolgens geeft het team het commando aan het uiteinde van de arm om complexere vormen te volgen, waaronder een achtvormige kromme en een cirkel, die representatief zijn voor veeleisende industriële bewegingen. Wederom loopt PID achter en wijkt het het meest van het pad af, verbetert fuzzy-logica het padvolgen, en houdt sliding-mode-regeling het uiteinde het dichtst bij de gewenste route, zowel in positie als in snelheid.
Cijfers die het volledige verhaal vertellen
Om verder te gaan dan visuele plots gebruikt de studie standaard foutmaten die vastleggen hoe ver, hoe lang en hoe persistent de arm afwijkt van zijn beoogde beweging. Deze maten tonen een duidelijke hiërarchie. Gemiddeld halveert fuzzy-logica de positie fouten ongeveer in vergelijking met PID, en sliding-mode-regeling vermindert ze met ongeveer vier vijfde. Zelfde patroon verschijnt bij het bekijken van hoe snel fouten in de loop van de tijd verdwijnen en hoeveel ze fluctueren. Wanneer de arm bijvoorbeeld het cirkelvormige pad volgt, bereikt de slechtste positie-afwijking voor PID rond een tiende van een meter, verkleint fuzzy-logica dat tot enkele centimeters, en houdt sliding-mode-regeling de afwijking tot slechts een paar millimeter. Een statistische blik op maximale fout, gemiddelde fout en spreiding in de tijd bevestigt dat sliding-mode-regeling consequent het nauwkeurigst en stabielst is, met fuzzy-logica in het midden en PID als laatste.
Wat dit betekent voor toekomstige robots
De studie concludeert dat hoewel de bekende PID-aanpak een robotarm nog steeds kan stabiliseren, het niet de beste keuze is wanneer paden krap zijn, ladingen wisselen of bewegingen snel zijn. Fuzzy-logica biedt een aantrekkelijke verbetering in nauwkeurigheid zonder een gedetailleerd model te vereisen, maar is afhankelijk van zorgvuldige, op ervaring gebaseerde afstemming. Sliding-mode-regeling, wanneer geïmplementeerd met een soepele schakelwet om overmatige chattering te vermijden, levert de scherpste volgkwaliteit en snelste demping in alle tests. Voor ingenieurs die planare robotarmen ontwerpen in fabrieken of onderzoekslaboratoria suggereren deze bevindingen dat investeren in robuuste niet-lineaire regeling veel preciezere en betrouwbaardere beweging kan opleveren, vooral wanneer de robot ingewikkelde trajecten moet volgen ondanks wrijving, koppeling tussen gewrichten en externe verstoringen.
Bronvermelding: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Trefwoorden: regeling van robotarm, trajectvolging, sliding-mode-regeling, fuzzy-logica-regeling, PID-regelaar