Clear Sky Science · pl
Odporne i inteligentne strategie sterowania dla manipulatora 3-DOF: badanie porównawcze
Dlaczego sterowanie robotem ma znaczenie w codziennym życiu
Od fabryk samochodów po urządzenia medyczne — wiele maszyn opiera się na ramionach robotycznych, które muszą poruszać się szybko i precyzyjnie, bez drgań czy pudłowania celu. W niniejszym badaniu przyjrzano się trzem powszechnym sposobom polecania trójczłonowemu ramieniu robota ruchu po zadanym torze i porównano ich skuteczność. Zrozumienie, która metoda jest dokładniejsza i bardziej niezawodna, pomaga inżynierom budować bezpieczniejsze, płynniejsze i bardziej wydajne roboty, które lepiej wspomagają ludzi w realnych zadaniach.
Trzy sposoby kierowania ramieniem robota
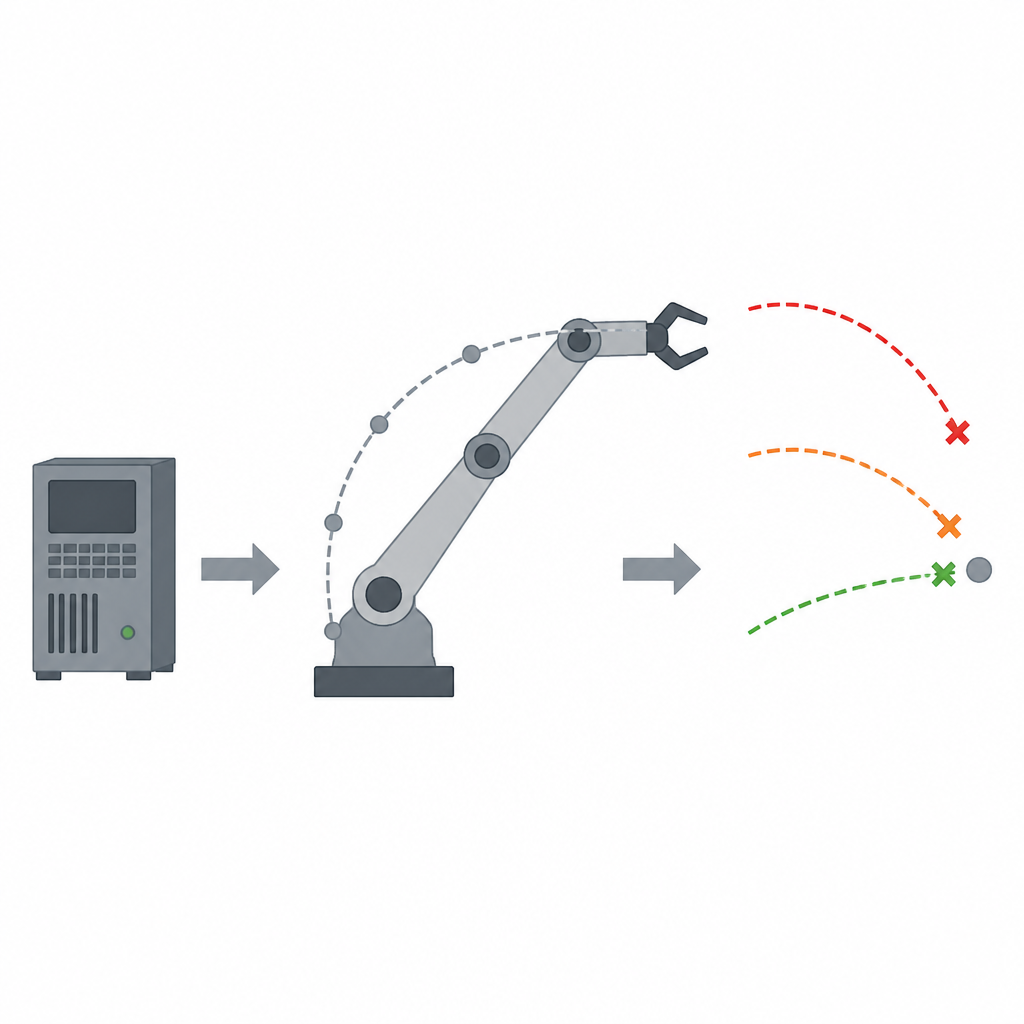
Naukowcy skupili się na prostym, lecz reprezentatywnym robocie: płaskim, trójprzegubowym ramieniu, które może obracać każdy staw, podobnie jak bark, łokieć i nadgarstek poruszające się w płaszczyźnie. Porównali trzy rodziny regulatorów, które przekształcają polecenia pozycji w momenty w stawach. Pierwszy, sterowanie PID, to długoletni fundament przemysłu, łatwy do zaprojektowania i nastawienia. Drugi, sterowanie logiką rozmytą, naśladuje ludzkie rozumowanie za pomocą reguł jeśli–to, bez potrzeby szczegółowego modelu matematycznego robota. Trzeci, sterowanie typu sliding mode, to bardziej zaawansowana metoda, która świadomie kształtuje sposób zaniku błędów w czasie i jest zaprojektowana tak, by być odporna na zaburzenia i niepewne siły działające na ramię.
Budowa realistycznego cyfrowego bliźniaka ramienia
Aby porównanie było uczciwe, zespół najpierw zbudował szczegółowy opis matematyczny ruchu ramienia robotycznego. Model uwzględnia oddziaływania mas elementów, wpływ obrotu w jednym stawie na pozostałe, działanie grawitacji na każdy element oraz tarcie przeciwstawiające się ruchowi w stawach. Następnie zaimplementowano ten model w środowisku symulacyjnym i zweryfikowano go w stosunku do opublikowanych wyników dla tego typu manipulatora. Polecając stawom robotycznym śledzenie gładkich, przesuniętych fal sinusoidalnych i porównując otrzymane ruchy z wcześniejszymi studiami, wykazano, że symulowane ramię zachowuje się niemal identycznie pod względem prędkości, amplitudy i czasowania, co daje pewność, że późniejsze testy regulatorów są realistyczne.
Jak zachowują się trzy regulatory w ruchu
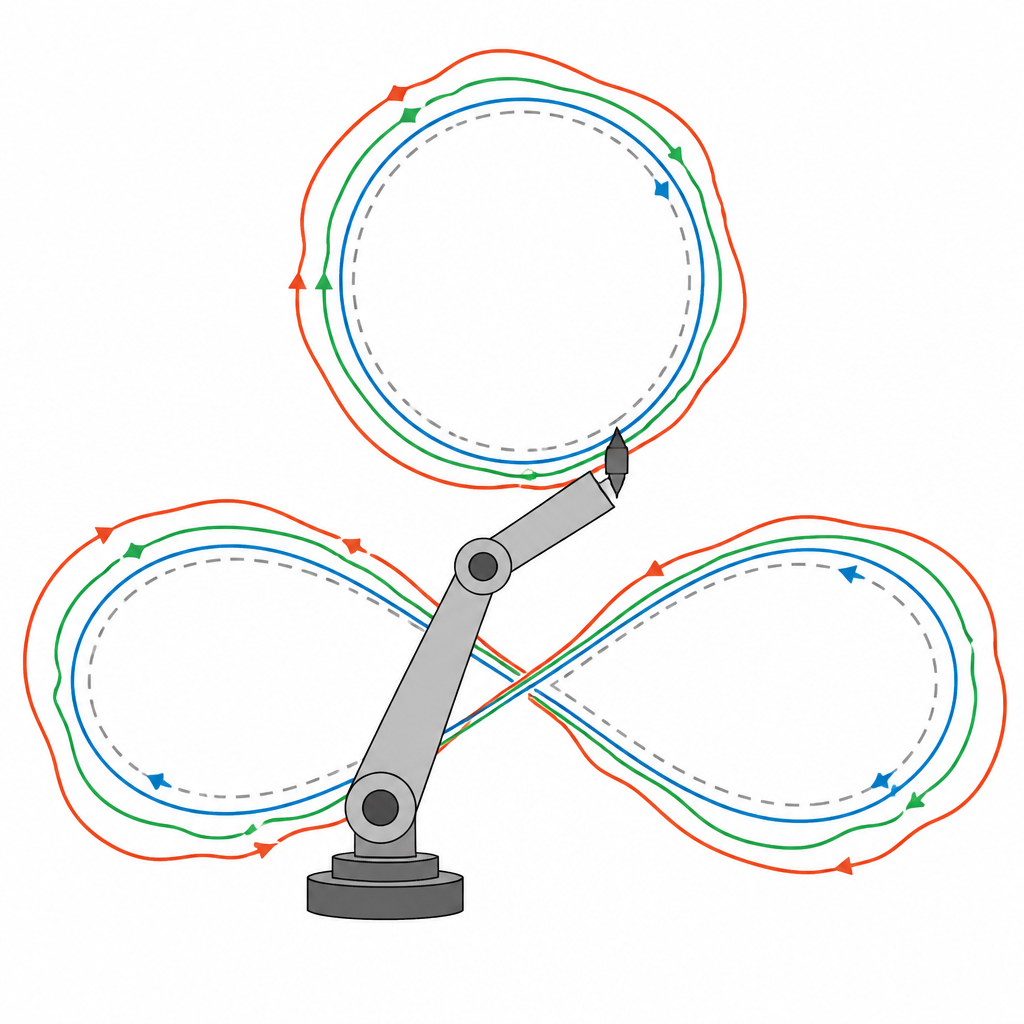
Z cyfrowym bliźniakiem gotowym, wszystkie trzy regulatory przetestowano na tych samych zadaniach. Najpierw każdy staw otrzymał polecenie skoku do nowego kąta i ustabilizowania się. Wszystkie metody ostatecznie osiągają cel, ale sterowanie PID przekracza zadany punkt i potrzebuje najwięcej czasu, by się uspokoić. Logika rozmyta znacznie ogranicza przeregulowanie i wygładza odpowiedź, choć w niektórych przypadkach może być nieco wolniejsza. Sterowanie sliding mode reaguje najszybciej i osiąga spokój z niemal zerowym przeregulowaniem we wszystkich trzech stawach. Następnie zespół polecił końcówce ramienia narysowanie bardziej złożonych kształtów, w tym toru ósemkowego i koła, które reprezentują wymagające ruchy przemysłowe. Ponownie, PID pozostaje opóźniony i najdalej od zadanego toru, logika rozmyta poprawia śledzenie, a sterowanie sliding mode utrzymuje końcówkę najbliżej żądanej ścieżki zarówno pod względem położenia, jak i prędkości.
Liczy się liczba: dane mówią wszystko
Aby wyjść poza wykresy wizualne, badanie wykorzystuje standardowe miary błędu, które uchwycają, jak daleko, jak długo i jak uporczywie ramię odbiega od zamierzonego ruchu. Miary te pokazują wyraźną hierarchię. Średnio logika rozmyta redukuje błędy pozycji mniej więcej o połowę w porównaniu z PID, a sterowanie sliding mode zmniejsza je o około cztery piąte. Podobny wzór pojawia się przy analizie szybkości zaniku błędów i ich fluktuacji. Gdy ramię śledzi tor kołowy, na przykład, największe odchylenie pozycji przy PID sięga około dziesięciu centymetrów, logika rozmyta zmniejsza to do kilku centymetrów, a sterowanie sliding mode utrzymuje odchylenie na poziomie zaledwie kilku milimetrów. Analiza statystyczna maksymalnego błędu, błędu średniego i rozproszenia w czasie potwierdza, że sterowanie sliding mode jest konsekwentnie najdokładniejsze i najstabilniejsze, z logiką rozmytą na drugim miejscu i PID na końcu.
Co to oznacza dla przyszłych robotów
Badanie konkluduje, że choć znane podejście PID nadal może ustabilizować ramię robota, nie jest najlepszym wyborem, gdy tory są ciasne, obciążenia się zmieniają lub ruch jest szybki. Logika rozmyta oferuje atrakcyjne zwiększenie dokładności bez potrzeby szczegółowego modelu, lecz wymaga starannego strojenia opartego na doświadczeniu. Sterowanie sliding mode, jeśli zaimplementowane z gładkim prawem przełączania aby uniknąć nadmiernego drżenia (chatteringu), zapewnia najostrzejsze śledzenie i najszybsze ustalanie we wszystkich testach. Dla inżynierów projektujących płaskie ramiona robotyczne w fabrykach czy laboratoriach badawczych wyniki te sugerują, że inwestycja w odporne sterowanie nieliniowe może przynieść znacznie precyzyjniejsze i bardziej niezawodne ruchy, zwłaszcza gdy robot musi podążać po złożonych trajektoriach w obliczu tarcia, sprzężeń między stawami i zaburzeń zewnętrznych.
Cytowanie: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Słowa kluczowe: sterowanie manipulatorem, śledzenie trajektorii, sterowanie sliding mode, sterowanie logiką rozmytą, regulator PID