Clear Sky Science · ru
Надёжные и интеллектуальные стратегии управления 3-DOF робо-рукой: сравнительное исследование
Почему управление роботами важно в повседневной жизни
От автомобильных заводов до медицинских приборов — многие машины опираются на робо-руки, которые должны двигаться быстро и точно, не допуская дрожания и пропусков целей. В этом исследовании рассматриваются три распространённых способа задания движения трёхсуставной робо-руке и сравнивается их эффективность. Понимание того, какой метод точнее и надёжнее, помогает инженерам создавать более безопасных, плавных и эффективных роботов, способных лучше помогать людям в реальных задачах.
Три подхода к управлению робо-рукой
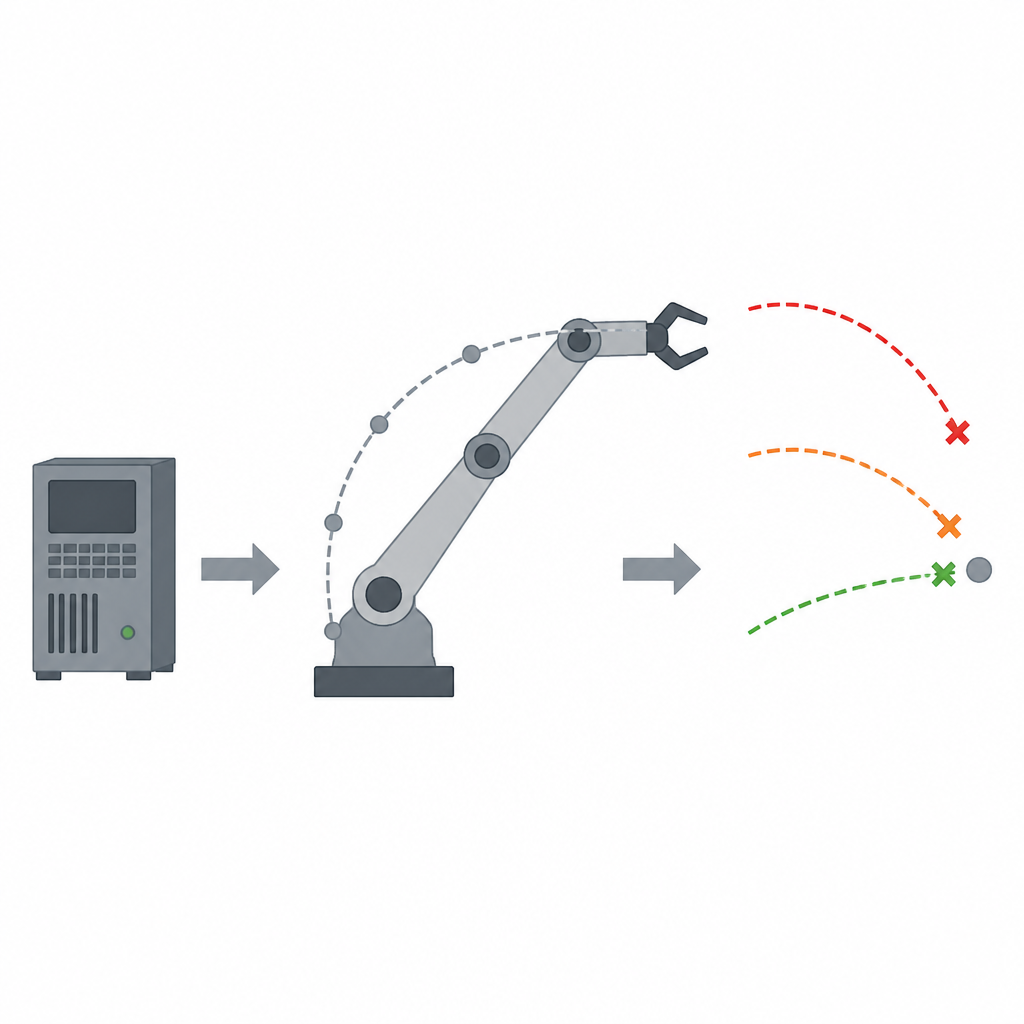
Исследователи сосредоточены на простом, но репрезентативном роботе: плоская трёхзвенная рука, которая может вращать каждый шарнир, подобно плечу, локтю и запястью человека в одной плоскости. Сравниваются три семейства регуляторов, превращающих команды по положению в крутящие моменты на суставах. Первый — PID-регулятор — давно служит промышленным стандартом, поскольку его просто проектировать и настраивать. Второй — управление нечёткой логикой — имитирует человеческое рассуждение с помощью правил «если — то», не требуя точной математической модели робота. Третий — управление скользящим режимом — более продвинутая схема, которая целенаправленно формирует скорость уменьшения ошибок во времени и спроектирована быть устойчивой к возмущениям и неопределённым силам, действующим на руку.
Построение реалистичного цифрового двойника руки
Чтобы сравнение было честным, команда сначала строит детальное математическое описание движения робо-руки. В модель включены взаимодействия масс звеньев, влияние вращения одного сустава на остальные, действие гравитации на каждое звено и сопротивление трения в суставах. Далее модель реализуют в среде симуляции и сверяют с опубликованными результатами для того же типа манипулятора. Командуя суставам следовать плавным смещённым синусоидальным сигналам и сравнивая полученные движения с предыдущими работами, они показывают, что их смоделированная рука ведёт себя почти идентично по скорости, амплитуде и времени, что даёт уверенность в реалистичности последующих тестов регуляторов.
Как три регулятора ведут себя в движении
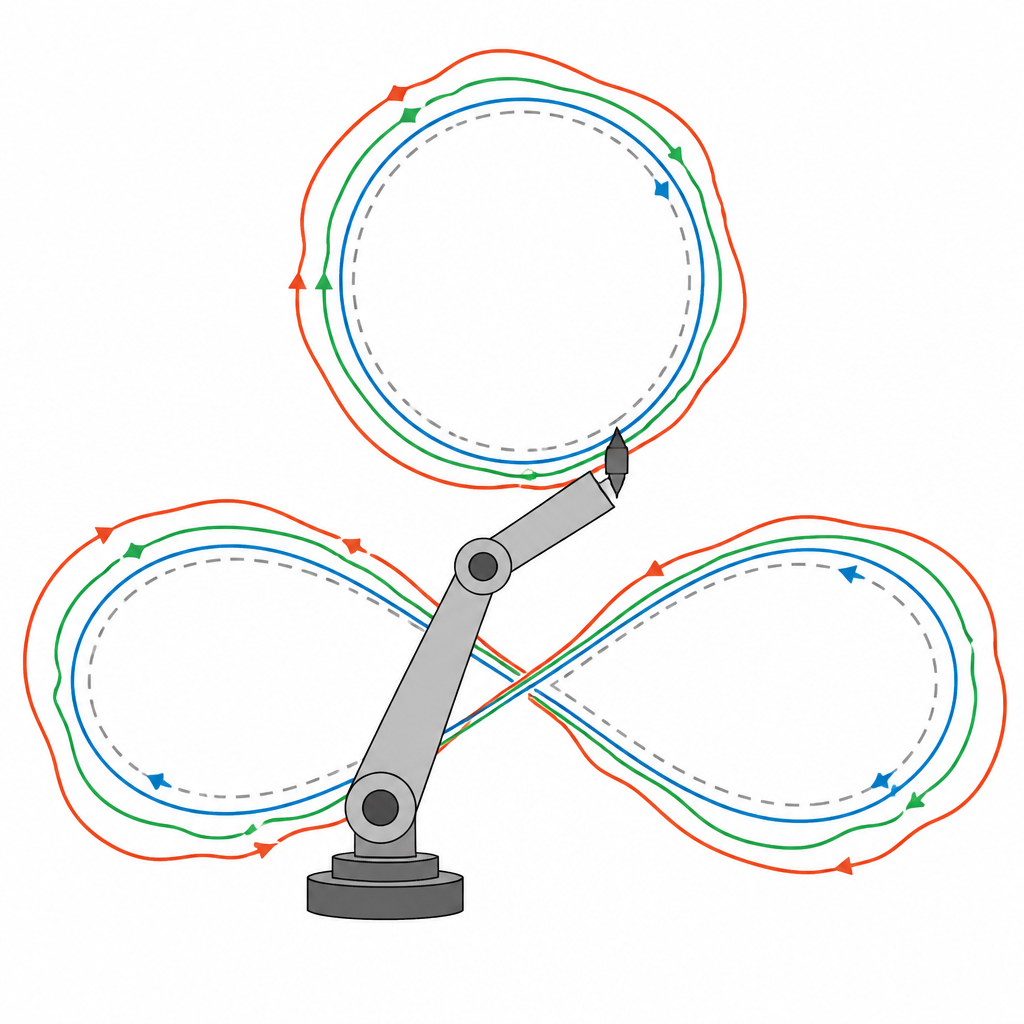
Имея цифровой двойник, все три регулятора тестируются на одинаковых задачах. Сначала каждому суставу приказывают резко перейти на новый угол и затухнуть. Все методы в конечном итоге достигают цели, но PID-регулятор даёт перерасход и требует больше времени для успокоения. Нечёткая логика значительно уменьшает перерасход и сглаживает отклик, хотя в некоторых случаях может работать чуть медленнее. Управление скользящим режимом реагирует быстрее всех и останавливается с практически нулевым перерасходом по всем трём суставам. Затем командуют кончик руки описывать более сложные формы, включая восьмёрку и круг, которые представляют требовательные промышленные движения. Снова PID отстаёт и больше уходит от заданной траектории, нечёткая логика улучшает следование, а скользящий режим удерживает кончик ближе всего к желаемому маршруту как по положению, так и по скорости.
Числа, которые рассказывают полную картину
Чтобы выйти за рамки визуальных графиков, исследование использует стандартные метрики ошибок, отражающие насколько далеко, как долго и насколько устойчиво рука отклоняется от заданного движения. Эти показатели выявляют ясную иерархию. В среднем нечёткая логика сокращает ошибки положения примерно вдвое по сравнению с PID, а управление скользящим режимом уменьшает их примерно на четыре пятых. Та же закономерность наблюдается при анализе скорости затухания ошибок и их колебаний. Например, при трассировке круговой траектории наихудшее отклонение позиции для PID достигает порядка десятой доли метра, нечёткая логика уменьшает это до нескольких сантиметров, а скользящий режим удерживает отклонение на уровне лишь нескольких миллиметров. Статистический анализ максимальной ошибки, средней ошибки и разброса со временем подтверждает, что скользящий режим стабильно самый точный и устойчивый, нечёткая логика занимает промежуточное место, а PID — последнее.
Что это значит для будущих роботов
Исследование делает вывод, что хотя привычный подход PID всё ещё может стабилизировать робо-руку, он не лучший выбор, когда траектории узкие, нагрузки меняются или движение быстрое. Нечёткая логика предлагает привлекательное улучшение точности без необходимости детальной модели, но требует аккуратной настройки на основе опыта. Управление скользящим режимом, при реализации со сглаживающим законом переключения для избежания чрезмерного «дрожания», обеспечивает самое чёткое слежение и самое быстрое затухание ошибок во всех тестах. Для инженеров, проектирующих плоские робо-руки для заводов или лабораторий, эти выводы указывают, что вложения в робастные нелинейные методы управления могут дать значительно более точное и надёжное движение, особенно когда робот должен следовать сложным траекториям в условиях трения, взаимного влияния суставов и внешних возмущений.
Цитирование: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Ключевые слова: управление робо-рукой, сопровождение траектории, скользящий режим управления, управление нечёткой логикой, регулятор PID