Clear Sky Science · fr
Stratégies de commande robustes et intelligentes pour un bras robotique à 3 DDL : une étude comparative
Pourquoi la commande robotique importe au quotidien
Des usines automobiles aux dispositifs médicaux, de nombreuses machines s’appuient sur des bras robotisés qui doivent se déplacer rapidement et précisément sans trembler ni manquer leur cible. Cette étude examine trois façons courantes d’indiquer à un bras robotique à trois articulations comment suivre une trajectoire et compare leur efficacité. Comprendre quelle méthode est la plus précise et fiable aide les ingénieurs à concevoir des robots plus sûrs, plus fluides et plus efficaces, capables d’assister efficacement dans des tâches réelles.
Trois façons de piloter un bras robotique
Les chercheurs se concentrent sur un robot simple mais représentatif : un bras plan à trois maillons qui peut faire osciller chaque articulation, un peu comme une épaule, un coude et un poignet humains se déplaçant dans un plan. Ils comparent trois familles de régulateurs qui transforment des consignes de position en couples aux articulations. Le premier, le contrôle PID, est le cheval de bataille de l’industrie car il est facile à concevoir et à régler. Le second, le contrôle par logique floue, imite le raisonnement humain avec des règles si–alors, sans nécessiter un modèle mathématique détaillé du robot. Le troisième, le contrôle par mode glissant, est un schéma plus avancé qui façonne délibérément la décroissance des erreurs dans le temps et est conçu pour être robuste face aux perturbations et aux forces incertaines agissant sur le bras.
Construire un jumeau numérique réaliste du bras
Pour que la comparaison soit équitable, l’équipe commence par établir une description mathématique détaillée du mouvement du bras robotique. Ce modèle inclut l’interaction des masses des maillons, l’influence de la rotation d’une articulation sur les autres, l’effet de la gravité sur chaque maillon et la résistance au mouvement due aux frottements aux articulations. Ils implémentent ensuite ce modèle dans un environnement de simulation et le valident par rapport à des résultats publiés pour le même type de manipulateur. En ordonnant aux articulations de suivre des ondes sinusoïdales lissées et décalées et en comparant les mouvements obtenus avec les études antérieures, ils montrent que le bras simulé se comporte presque identiquement en vitesse, amplitude et timing, ce qui donne confiance dans le réalisme des tests ultérieurs des régulateurs.
Comment se comportent les trois régulateurs en mouvement
Avec le jumeau numérique en place, les trois régulateurs sont testés sur les mêmes tâches. D’abord, chaque articulation reçoit l’ordre de sauter vers un nouvel angle puis de s’y stabiliser. Toutes les méthodes atteignent finalement la consigne, mais le PID dépasse l’objectif et met le plus de temps à s’apaiser. La logique floue réduit fortement le dépassement et lisse la réponse, bien qu’elle puisse être légèrement plus lente dans certains cas. Le contrôle par mode glissant réagit le plus rapidement et se stabilise avec quasiment aucun dépassement sur les trois articulations. Ensuite, l’équipe commande à l’extrémité du bras de tracer des formes plus complexes, notamment une courbe en huit et un cercle, représentatives de mouvements industriels exigeants. Là encore, le PID accuse du retard et s’écarte le plus de la trajectoire, la logique floue améliore le suivi, et le contrôle par mode glissant maintient l’extrémité le plus proche de la trajectoire désirée tant en position qu’en vitesse.
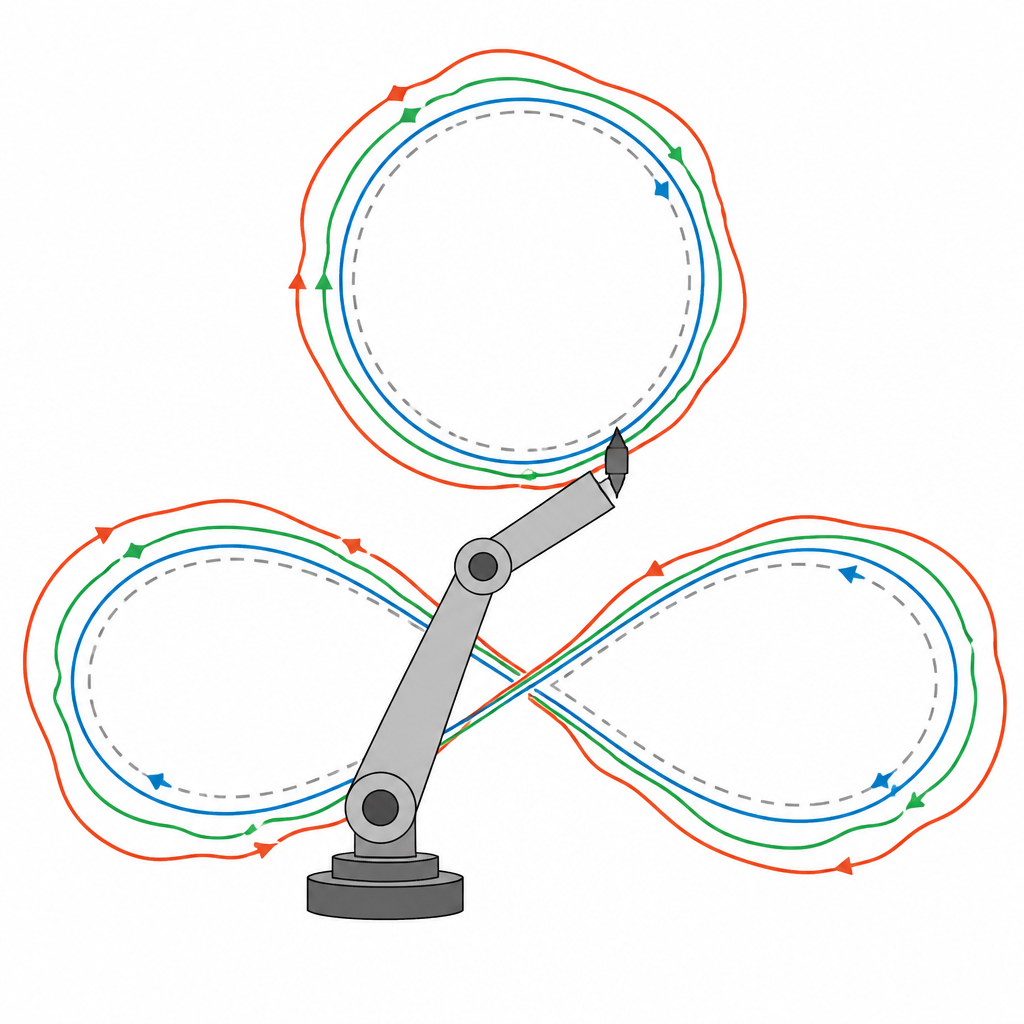
Les chiffres qui racontent toute l’histoire
Pour aller au-delà des courbes visuelles, l’étude utilise des mesures d’erreur standard qui capturent à quelle distance, pendant combien de temps et de façon persistante le bras dérive de son mouvement prévu. Ces mesures montrent une hiérarchie claire. En moyenne, la logique floue divise par deux environ les erreurs de position par rapport au PID, et le contrôle par mode glissant les réduit d’environ quatre cinquièmes. Le même schéma apparaît lorsqu’on examine la vitesse d’atténuation des erreurs et leur fluctuation. Par exemple, lors du tracé de la trajectoire circulaire, l’erreur de position maximale pour le PID atteint environ un dixième de mètre, la logique floue la ramène à quelques centimètres, et le contrôle par mode glissant limite l’écart à seulement quelques millimètres. Un examen statistique de l’erreur maximale, de l’erreur moyenne et de la dispersion dans le temps confirme que le contrôle par mode glissant est systématiquement le plus précis et stable, la logique floue occupant une position intermédiaire et le PID arrivant en dernier.
Ce que cela signifie pour les robots de demain
L’étude conclut que, si l’approche PID familière peut encore stabiliser un bras robotique, elle n’est pas le meilleur choix lorsque les trajectoires sont serrées, les charges varient ou les mouvements sont rapides. La logique floue offre un intéressant gain de précision sans exiger un modèle détaillé, mais elle dépend d’un réglage soigneux et empirique. Le contrôle par mode glissant, lorsqu’il est mis en œuvre avec une loi de commutation lissée pour éviter un phénomène de chatter excessif, fournit le suivi le plus précis et l’aplatissement le plus rapide sur l’ensemble des tests. Pour les ingénieurs concevant des bras planaires en usine ou en laboratoire, ces résultats suggèrent qu’investir dans un contrôle non linéaire robuste peut produire des mouvements beaucoup plus précis et fiables, en particulier lorsque le robot doit suivre des trajectoires complexes en présence de frottements, d’interactions entre articulations et de perturbations externes.
Citation: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Mots-clés: commande de bras robotique, suivi de trajectoire, contrôle par mode glissant, contrôle par logique floue, régulateur PID