Clear Sky Science · pt
Estratégias de controle robustas e inteligentes para um braço robótico de 3 GDL: um estudo comparativo
Por que o controle de robôs importa no cotidiano
De fábricas de automóveis a dispositivos médicos, muitas máquinas dependem de braços robóticos que precisam se mover rápido e com precisão, sem trepidações ou falta de alvo. Este estudo analisa três maneiras comuns de comandar um braço robótico de três articulações ao longo de uma trajetória e compara sua eficácia. Entender qual método é mais preciso e confiável ajuda engenheiros a construir robôs mais seguros, suaves e eficientes, capazes de auxiliar melhor as pessoas em tarefas do mundo real.
Três modos de guiar um braço robótico
Os pesquisadores focam em um robô simples, mas representativo: um braço plano de três elos que pode girar cada junta, semelhante ao movimento de ombro, cotovelo e punho humanos em um plano. Eles comparam três famílias de controladores que convertem comandos de posição em torques nas juntas. O primeiro, controle PID, é o veterano da indústria por ser fácil de projetar e ajustar. O segundo, controle por lógica fuzzy, imita o raciocínio humano com regras do tipo se–então, sem exigir um modelo matemático detalhado do robô. O terceiro, controle em modo deslizante, é um esquema mais avançado que molda deliberadamente como os erros decrescem ao longo do tempo e foi projetado para ser resistente a perturbações e forças incertas agindo sobre o braço.
Construindo um gêmeo digital realista do braço
Para tornar a comparação justa, a equipe primeiro constrói uma descrição matemática detalhada de como o braço robótico se move. Esse modelo inclui como as massas dos elos interagem, como a rotação em uma junta afeta as outras, como a gravidade atua em cada elo e como o atrito resiste ao movimento nas juntas. Em seguida, implementam esse modelo em um ambiente de simulação e o verificam contra resultados publicados para o mesmo tipo de manipulador. Ao comandar as juntas do robô a seguirem ondas senoidais suaves e deslocadas e comparar os movimentos resultantes com estudos anteriores, mostram que o braço simulado se comporta quase identicamente em velocidade, amplitude e tempo, dando confiança de que os testes posteriores dos controladores são realistas.
Como os três controladores se comportam em movimento
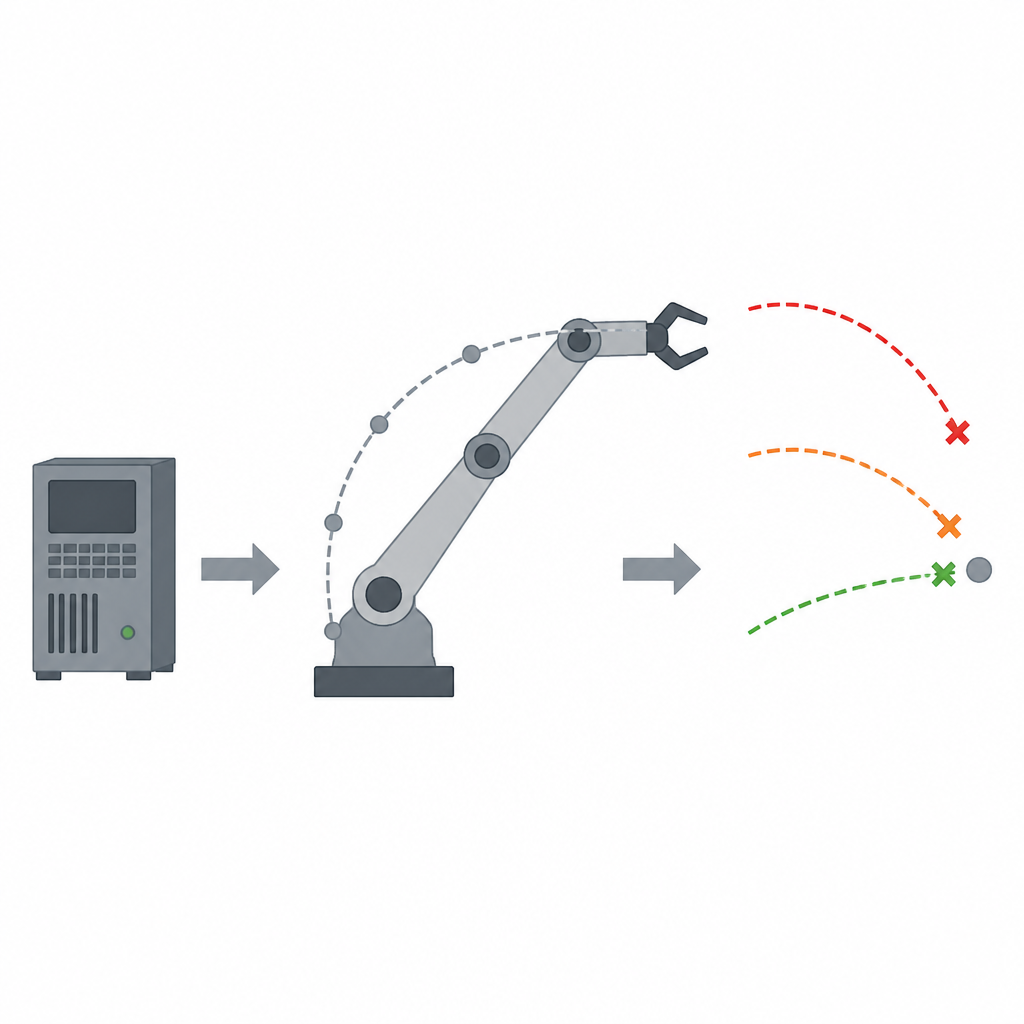
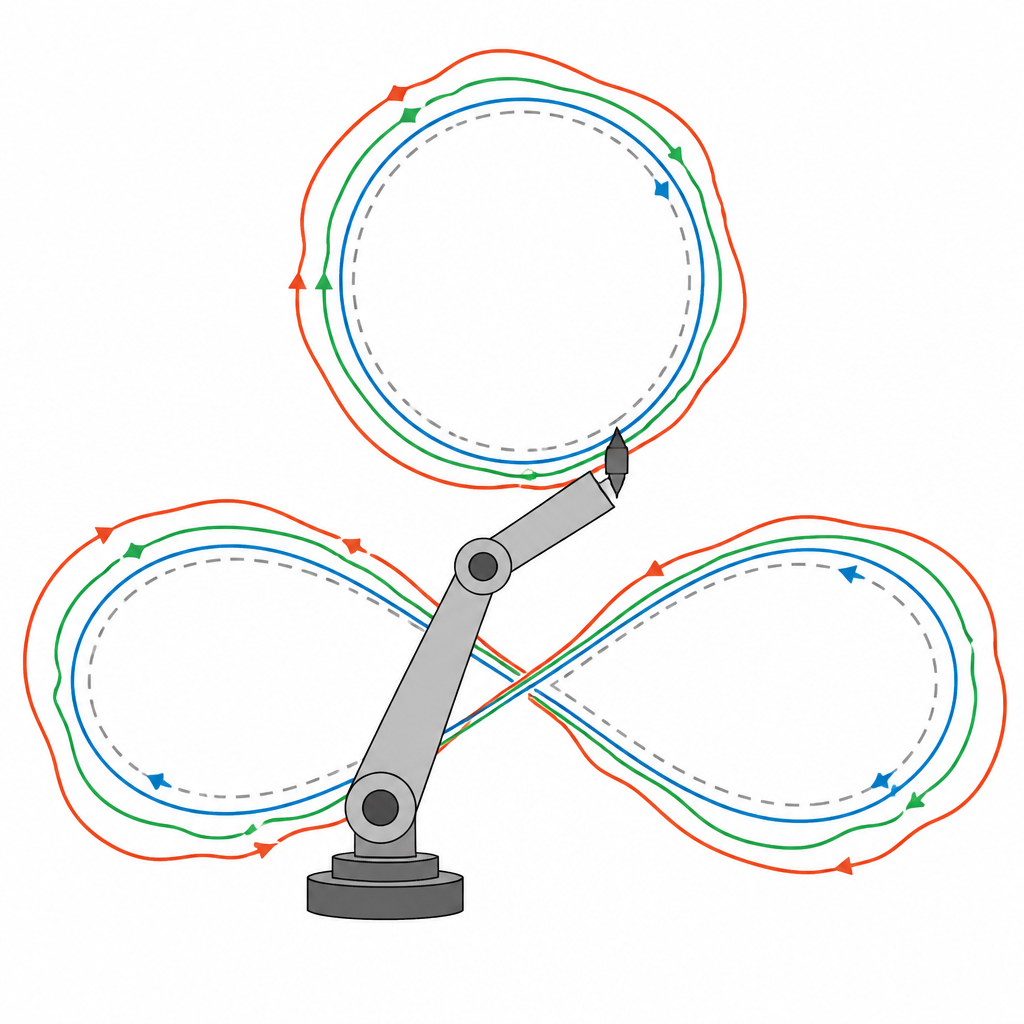
Com o gêmeo digital pronto, todos os três controladores são testados nas mesmas tarefas. Primeiro, cada junta é solicitada a saltar para um novo ângulo e estabilizar. Todos os métodos eventualmente alcançam o alvo, mas o PID tende a ultrapassar o objetivo e demora mais para se acalmar. A lógica fuzzy reduz bastante o overshoot e suaviza a resposta, embora em alguns casos possa ser um pouco mais lenta. O controle em modo deslizante responde mais rápido e para praticamente sem overshoot nas três juntas. Em seguida, a equipe comanda a ponta do braço para traçar formas mais complexas, incluindo uma curva em oito e um círculo, representativas de movimentos industriais exigentes. Novamente, o PID fica para trás e se afasta mais da trajetória, a lógica fuzzy melhora o seguimento e o controle em modo deslizante mantém a ponta mais próxima da rota desejada, tanto em posição quanto em velocidade.
Números que contam toda a história
Para ir além de gráficos visuais, o estudo usa medidas de erro padrão que capturam o quanto, por quanto tempo e com que persistência o braço se desvia do movimento pretendido. Essas medidas mostram uma hierarquia clara. Em média, a lógica fuzzy reduz os erros de posição aproximadamente pela metade em comparação com o PID, e o controle em modo deslizante os reduz em cerca de quatro quintos. O mesmo padrão aparece ao observar quão rapidamente os erros desaparecem ao longo do tempo e quanto eles flutuam. Quando o braço traça a trajetória circular, por exemplo, o pior desvio de posição com PID chega a cerca de um décimo de metro, a lógica fuzzy reduz isso para alguns centímetros e o controle em modo deslizante mantém o desvio em apenas alguns milímetros. Uma análise estatística do erro máximo, erro médio e dispersão ao longo do tempo confirma que o controle em modo deslizante é consistentemente o mais preciso e estável, com a lógica fuzzy em segundo e o PID em último.
O que isso significa para robôs futuros
O estudo conclui que, embora a abordagem familiar do PID ainda possa estabilizar um braço robótico, ela não é a melhor escolha quando as trajetórias são apertadas, as cargas mudam ou o movimento é rápido. A lógica fuzzy oferece um avanço atraente em precisão sem exigir um modelo detalhado, mas depende de ajuste cuidadoso baseado na experiência. O controle em modo deslizante, quando implementado com uma lei de comutação suavizada para evitar chattering excessivo, proporciona o melhor acompanhamento e o tempo de assentamento mais rápido em todos os testes. Para engenheiros que projetam braços robóticos planares em fábricas ou laboratórios de pesquisa, esses achados sugerem que investir em controle não linear robusto pode oferecer movimentos muito mais precisos e confiáveis, especialmente quando o robô deve seguir trajetórias complexas diante de atrito, acoplamento entre juntas e perturbações externas.
Citação: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Palavras-chave: controle de braço robótico, rastreamento de trajetória, controle em modo deslizante, controle por lógica fuzzy, controlador PID