Clear Sky Science · de
Robuste und intelligente Regelstrategien für einen 3-Freiheitsgrad-Roboterarm: eine vergleichende Studie
Warum Roboterregelung im Alltag wichtig ist
Von Autofabriken bis zu medizinischen Geräten verlassen sich viele Maschinen auf Roboterarme, die schnell und präzise ohne Schwanken oder Zielverfehlungen arbeiten müssen. Diese Studie betrachtet drei gängige Verfahren, einem dreigelenkigen Roboterarm Vorgaben für die Bewegung entlang einer Bahn zu geben, und vergleicht deren Leistungsfähigkeit. Zu verstehen, welche Methode genauer und zuverlässiger ist, hilft Ingenieurinnen und Ingenieuren, sichere, ruckfreie und effizientere Roboter zu entwickeln, die reale Aufgaben besser unterstützen.
Drei Wege, einen Roboterarm zu steuern
Die Forschenden konzentrieren sich auf einen einfachen, aber repräsentativen Roboter: einen flachen Arm mit drei Gliedern, dessen Gelenke jeweils geschwenkt werden können, ähnlich Schulter, Ellbogen und Handgelenk, die sich in einer Ebene bewegen. Sie vergleichen drei Familien von Reglern, die Soll-Positionsvorgaben in Gelenkmomente umsetzen. Erstens die PID-Regelung, ein bewährter Industriestandard, weil sie sich leicht entwerfen und abstimmen lässt. Zweitens die Fuzzy-Logic-Regelung, die menschliches, regelbasiertes Denken mit Wenn–Dann-Regeln nachahmt, ohne ein detailliertes mathematisches Modell des Roboters zu benötigen. Drittens die Sliding-Mode-Regelung, ein fortgeschrittener Ansatz, der gezielt steuert, wie Fehler im Zeitverlauf schrumpfen, und dafür ausgelegt ist, robust gegenüber Störungen und Unsicherheiten zu sein, die auf den Arm einwirken.
Aufbau eines realistischen digitalen Zwillings des Arms
Um den Vergleich fair zu gestalten, entwickelt das Team zunächst eine detaillierte mathematische Beschreibung der Armbewegung. Das Modell berücksichtigt, wie sich die Massen der Glieder gegenseitig beeinflussen, wie die Drehung an einem Gelenk die anderen beeinflusst, wie die Schwerkraft an jedem Glied zieht und wie Reibung die Gelenkbewegung hemmt. Dieses Modell wird in einer Simulationsumgebung implementiert und mit veröffentlichten Ergebnissen für denselben Manipulatortyp abgeglichen. Indem die Gelenke mit sanften, phasenverschobenen Sinusvorgaben angesteuert und die resultierenden Bewegungen mit früheren Studien verglichen werden, zeigen sie, dass ihr simuliertes Modell in Geschwindigkeit, Amplitude und Timing praktisch identisch reagiert — ein Vertrauenserweis, dass die späteren Reglertests realitätsnah sind.
Wie sich die drei Regler in Bewegung verhalten
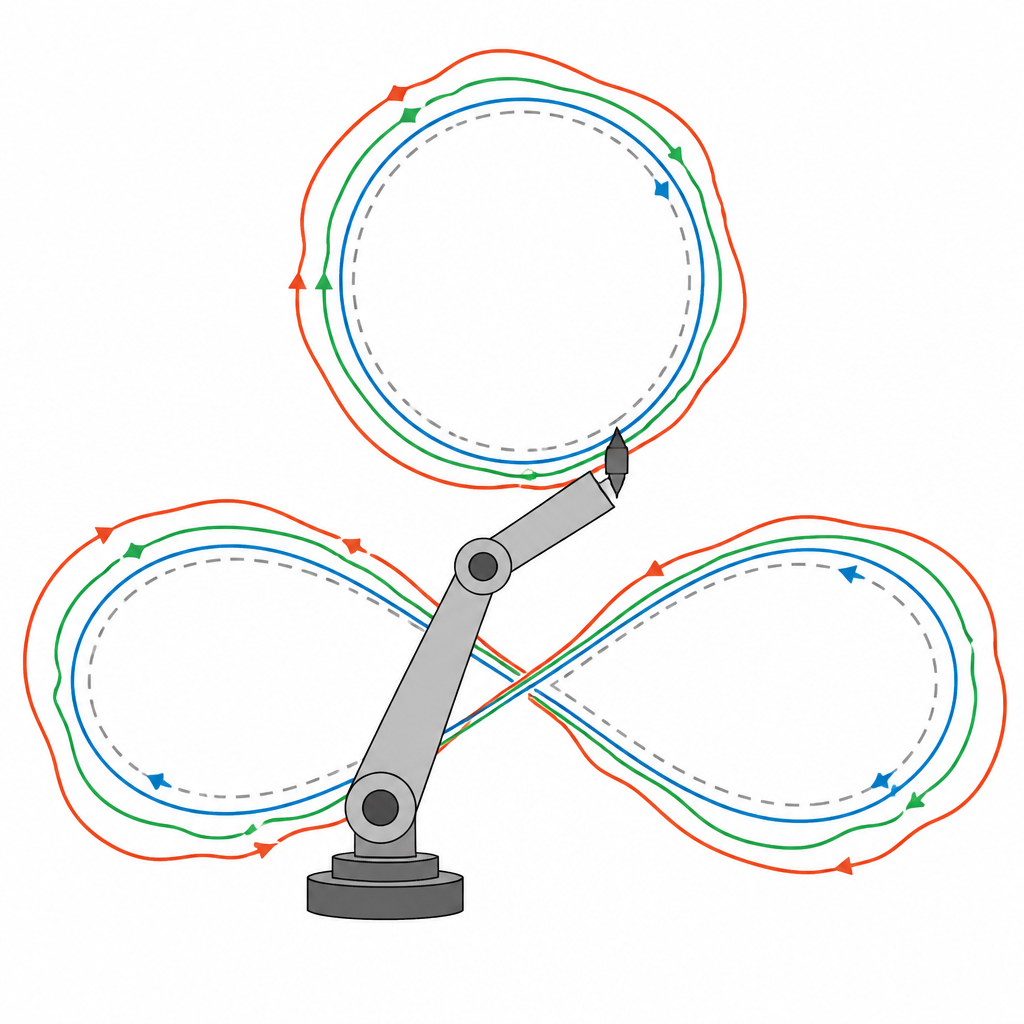
Mithilfe des digitalen Zwillings werden alle drei Regler an denselben Aufgaben getestet. Zuerst soll jedes Gelenk auf einen neuen Winkel springen und dort zur Ruhe kommen. Alle Methoden erreichen schließlich das Ziel, doch die PID-Regelung überschießt und braucht am längsten, um abzuklingen. Fuzzy-Logic reduziert das Überschwingen deutlich und glättet das Ansprechverhalten, kann aber in manchen Fällen etwas langsamer sein. Die Sliding-Mode-Regelung reagiert am schnellsten und kommt bei allen drei Gelenken mit nahezu keinem Überschwingen zur Ruhe. Danach lässt das Team die Spitze des Arms komplexere Bahnen nachfahren, einschließlich einer Achterkurve und eines Kreises, die anspruchsvolle industrielle Bewegungen repräsentieren. Auch hier hinkt PID hinterher und weicht am stärksten von der Bahn ab, Fuzzy-Logic verbessert die Bahnverfolgung, und die Sliding-Mode-Regelung hält die Spitze in beiden Größen — Position und Geschwindigkeit — am dichtesten an der gewünschten Route.
Zahlen, die die ganze Geschichte erzählen
Um über visuelle Plots hinaus zu kommen, verwendet die Studie gängige Fehlermaße, die erfassen, wie weit, wie lange und wie beständig der Arm von seiner vorgesehenen Bewegung abweicht. Diese Kennwerte zeigen eine klare Rangfolge: Im Mittel halbiert Fuzzy-Logic die Positionsfehler gegenüber PID, und Sliding-Mode reduziert sie um etwa vier Fünftel. Dasselbe Muster zeigt sich beim Abklingen der Fehler über die Zeit und bei ihrer Schwankungsbreite. Beim Nachfahren der Kreisbahn erreicht der schlimmste Positionsfehler bei PID beispielsweise rund ein Zehntel Meter, Fuzzy-Logic verringert das auf wenige Zentimeter, und die Sliding-Mode-Regelung begrenzt die Abweichung auf nur wenige Millimeter. Ein statistischer Blick auf Maximalfehler, Mittelwert und Streuung über die Zeit bestätigt, dass Sliding-Mode-Regelung durchgehend am genauesten und stabilsten ist, Fuzzy-Logic einen mittleren Platz einnimmt und PID am schlechtesten abschneidet.
Was das für zukünftige Roboter bedeutet
Die Studie kommt zu dem Schluss, dass die vertraute PID-Methode zwar einen Roboterarm stabilisieren kann, aber keine optimale Wahl ist, wenn Bahnen eng sind, Lasten schwanken oder Bewegungen schnell ablaufen. Fuzzy-Logic bietet einen attraktiven Genauigkeitssprung ohne detailliertes Modell, ist jedoch auf sorgfältige, erfahrungsbasierte Abstimmung angewiesen. Die Sliding-Mode-Regelung, umgesetzt mit einer geglätteten Schaltvorschrift, um übermäßiges „Chattering“ zu vermeiden, liefert die schärfste Nachführung und das schnellste Abklingen in allen Tests. Für Ingenieurinnen und Ingenieure, die planare Roboterarme in Fabriken oder Forschungslaboren entwerfen, legen diese Ergebnisse nahe, dass sich die Investition in robuste nichtlineare Regelung auszahlt — insbesondere wenn der Roboter komplizierte Trajektorien trotz Reibung, Gelenkkopplung und äußeren Störungen präzise und verlässlich folgen muss.
Zitation: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
Schlüsselwörter: Steuerung von Roboterarmen, Trajektorienverfolgung, Sliding-Mode-Regelung, Fuzzy-Logic-Regelung, PID-Regler