Clear Sky Science · ja
3自由度ロボットアームの堅牢かつ知的な制御戦略:比較研究
なぜロボット制御が日常に重要なのか
自動車工場から医療機器まで、多くの機械はロボットアームに依存しており、揺れや目標逸脱なく迅速かつ精密に動く必要があります。本研究は、三関節のロボットアームに動作指令を与える代表的な3つの方法を検討し、それらの性能を比較します。どの手法がより正確で信頼できるかを理解することで、現実の作業で人を支援する、より安全で滑らか、かつ効率的なロボットの設計に役立ちます。
ロボットアームを操る3つの方法
研究者たちは、平面内で肩・肘・手首のように各関節を動かせる、単純だが代表的な平板3リンクアームに着目しています。位置指令を関節トルクに変換する3種類のコントローラ群を比較しました。第一はPID制御で、設計と調整が簡単なため産業界で長年使われています。第二はファジィ論理制御で、詳細な数理モデルを必要とせず、if–then規則で人の推論を模倣します。第三はスライディングモード制御で、誤差が時間とともにどのように収束するかを意図的に設計し、外乱や不確かさに対して強い耐性を持つ高度な方式です。
アームの現実的なデジタルツインを構築
比較を公平にするため、まずチームはロボットアームの詳細な運動の数学的記述を作成します。このモデルには、リンクの質量の相互作用、ある関節の回転が他に与える影響、各リンクに作用する重力、関節での摩擦による抵抗が含まれます。次にこのモデルをシミュレーション環境に実装し、同種マニピュレータの既報の結果と照合します。関節に平滑でオフセットを持つサイン波を追従させ、その結果の動きを先行研究と比較することで、シミュレーションしたアームが速度・振幅・タイミングの面でほぼ一致することを示し、その後のコントローラ評価が現実的であることを確かめています。
3つのコントローラの動作挙動
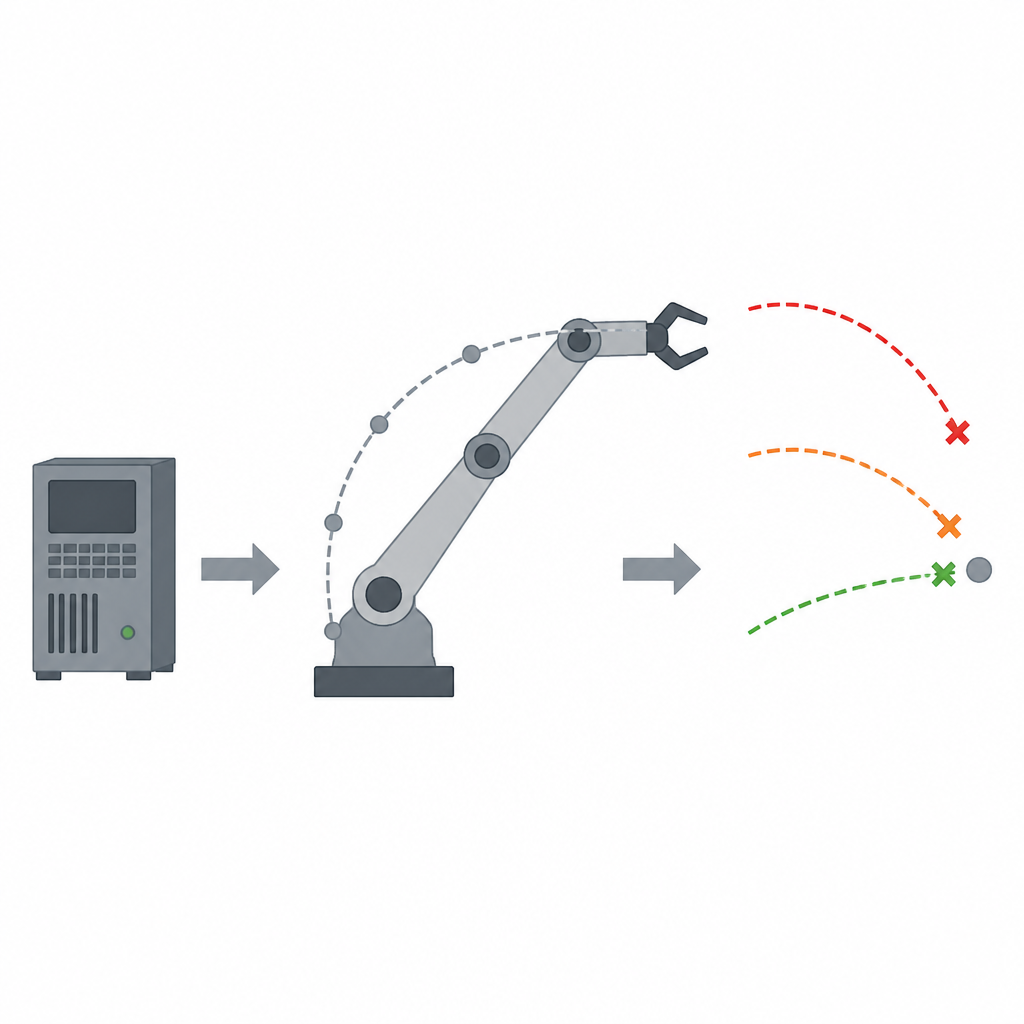
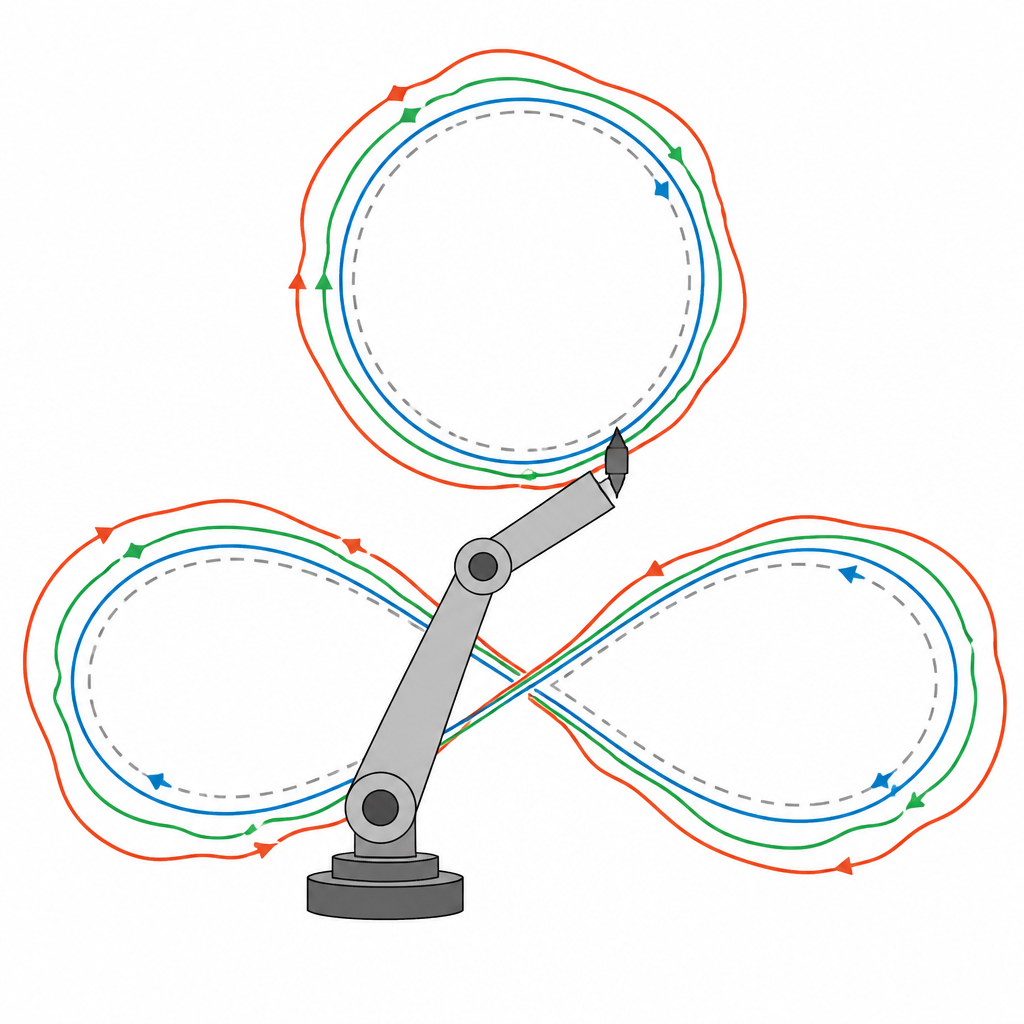
デジタルツインが整った後、同一タスクで3つのコントローラを試験します。まず各関節に新しい角度へジャンプして定常に落ち着くよう指令します。すべての手法が最終的に目標に到達しますが、PID制御は目標をオーバーシュートし、収束に最も時間がかかります。ファジィ論理はオーバーシュートを大幅に抑え応答を滑らかにしますが、場合によってはやや遅くなることがあります。スライディングモード制御は最速で応答し、3関節すべてでほとんどオーバーシュートなく静止します。次にアーム先端に対してフィギュアエイトや円形など、要求の高い工業的動作を模した複雑な軌道追従を指令します。ここでもPIDは遅れや最も大きな経路逸脱を示し、ファジィ論理は追従性を改善し、スライディングモード制御は位置・速度の両面で目標経路に最も近く保ちます。
数値が物語る全体像
視覚的プロットを超えて評価するために、研究はアームが意図した動きからどれだけ、どのくらい長く、どれだけ持続的にずれるかを捉える標準的な誤差指標を用います。これらの指標は明確な序列を示します。平均的に見て、ファジィ論理はPIDと比べ位置誤差をほぼ半分にし、スライディングモード制御は約4分の1程度にまで削減します。同様の傾向は誤差の消失速度や揺らぎの大きさでも現れます。例えば円軌道を追従させた場合、PIDの最悪の位置誤差は約0.1メートルに達するのに対し、ファジィ論理では数センチメートルに縮小し、スライディングモード制御では数ミリメートルに抑えられます。最大誤差、平均誤差、時間にわたるばらつきの統計評価は、スライディングモード制御が一貫して最も正確かつ安定であり、ファジィ論理が中間、PIDが最後であることを裏付けます。
将来のロボットにとっての意味
研究の結論は、慣れ親しんだPID方式でもロボットアームを安定化できるが、経路が厳しい場合、負荷が変化する場合、あるいは高速動作が要求される場合には最良の選択ではない、というものです。ファジィ論理は詳細なモデルなしで精度を向上させる魅力的な選択肢ですが、経験に基づく丁寧なチューニングが必要です。スライディングモード制御は、過度のチャタリングを避けるために滑らかな切替則と組み合わせると、すべての試験で最も鋭い追従性と最速の整定を提供します。工場や研究室で平面ロボットアームを設計する技術者にとって、堅牢な非線形制御に投資することは、摩擦・関節間結合・外乱に直面して複雑な軌道をたどらせる際に、はるかに精密で信頼性の高い動作をもたらすという示唆を与えます。
引用: Esmail, E.E., El-Khatib, M.F. & Agwa, M.A. Robust and intelligent control strategies for a 3-DOF robotic arm: a comparative study. Sci Rep 16, 16024 (2026). https://doi.org/10.1038/s41598-026-53593-2
キーワード: ロボットアーム制御, 軌道追従, スライディングモード制御, ファジィ論理制御, PIDコントローラ