Clear Sky Science · zh
基于 PID 与二次规划分配的悬挂单轨车稳定性控制
为何更平稳的单轨乘坐很重要
悬挂单轨因其低噪、占地小且建造成本相对较低,正出现在越来越多的城市与风景区。然而,当阵风与轨道上的小颠簸共同作用时,乘客会明显感到摆动与弹跳。本文研究如何通过一个智能控制系统静默地调整车厢下方的隐藏执行器,从而让乘坐感觉更加平稳与安全。
风与轨道如何扰动悬挂列车
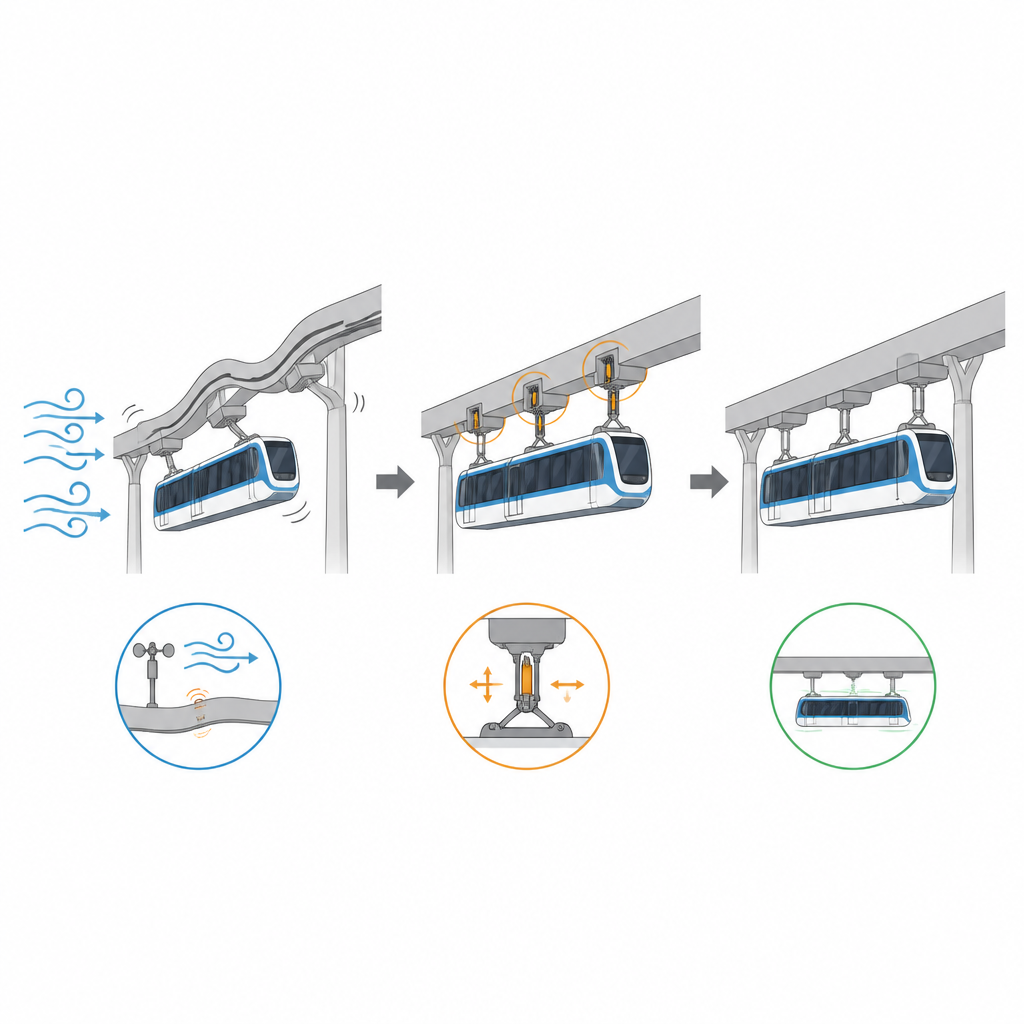
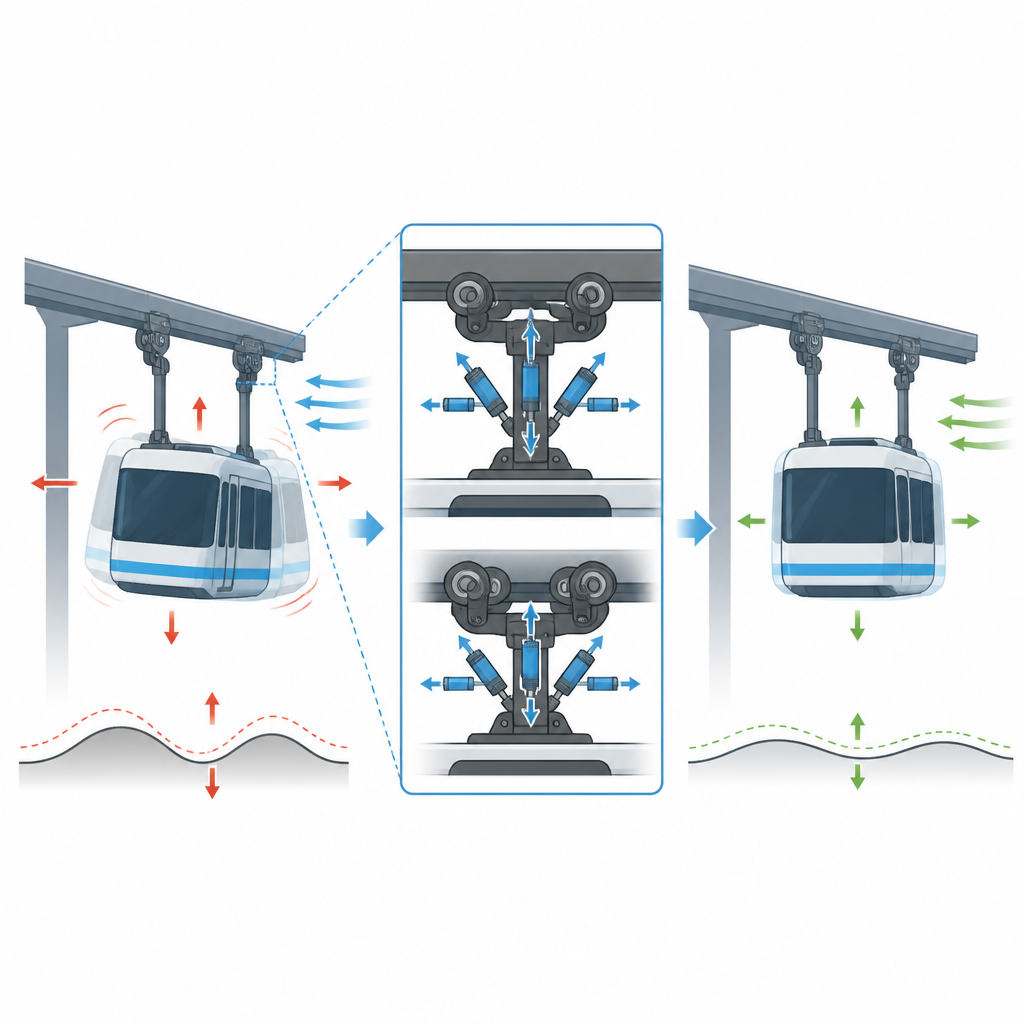
与位于轨道上方的传统列车不同,悬挂单轨车厢悬挂在梁下,这使其对侧向风与导轨不平更加敏感。横风从侧面推动车厢,而梁上的微小高低变化与不对准会扰动车轮。这些影响同时发生,且在侧向与垂直方向上耦合,导致的联动运动会影响舒适性甚至安全性。以往研究主要关注系统的运动特性、被动弹簧与阻尼的调校,或半主动装置的使用,而对在实际硬件受限条件下同时处理侧向与垂直运动的主动控制关注较少。
构建列车的真实数字孪生
为了设计能在实践中起作用的控制器,作者首先建立了一个包括车体、转向架、车轮与悬挂部件的详细悬挂单轨车辆计算机模型。随后他们利用运营列车的实测数据对该模型进行精化。通过调整关键参数直至仿真乘坐质量指标与测量值匹配,得到一个数据驱动的“数字孪生”,在真实轨道与风况下的行为与实际车辆相近。他们还以统计方式对自然风与轨道缺陷建模,使数字列车在测试中经历逼真的阵风与颠簸。
让车辆决定执行器最重要的位置
研究团队没有凭空猜测执行器位置,而是通过灵敏度研究来判断哪些位置与方向对车厢侧向和上下振动影响最大。基于该排序,他们在转向架与悬挂梁上选择了七个执行器位置。随后,他们在仿真中逐一激励每个执行器,并用简单拟合方法学习每个力如何改变车厢加速度。这生成了一张将执行器力映射到车厢运动的图谱,为在物理可实现范围内分配控制努力奠定了基础。
用于更平稳乘坐的两层控制方法
工作的核心是一个两层控制框架。内层由简单的反馈控制器监测车厢的侧向与垂直加速度,并产生旨在将这些值逼近零的“虚拟”控制需求。内层使用两种方案:一种是通过遗传搜索调参的传统控制器,另一种是模糊自整定版本,会根据运动幅度与速率的变化在线温和地重新调整增益。外层则采用二次优化算法,将这些虚拟需求转换为各个执行器的具体力,同时严格遵守每个执行器允许的推拉力限制。
仿真结果对乘坐舒适度的意义
研究者比较了三种内层控制器,外层分配层相同:经典最优控制、固定增益反馈和模糊自整定反馈。在相同的强横风与轨道不规则条件下,三者相比不受控情况都能减少振动。模糊自整定版本总体表现最好,平均将侧向与垂直加速度降低约五分之一,并将突发峰值约降低三分之一。标准乘坐质量指标也得到改善,运动轨迹随时间更平滑、不那么断裂。
这对未来单轨出行意味着什么
对乘客而言,该研究的主要成果意味着即便在有风且轨道不完美时,也能获得更安静、更稳定的乘坐体验。通过将直接的加速度测量与在多个执行器之间智能分配工作的方式结合,所提框架在保持实际硬件限制的同时有效控制车辆运动。作者指出仍需进一步优化执行器布局、处理更复杂的硬件效应并在实际列车上试验,但结果表明,精心设计的主动控制有望使悬挂单轨在日常城市交通中更舒适、更具吸引力。
引用: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
关键词: 悬挂单轨, 乘坐舒适度, 振动控制, PID 控制, 二次规划