Clear Sky Science · fr
Contrôle de stabilité des véhicules monorail suspendus basé sur PID et allocation par programmation quadratique
Pourquoi un trajet de monorail plus doux importe
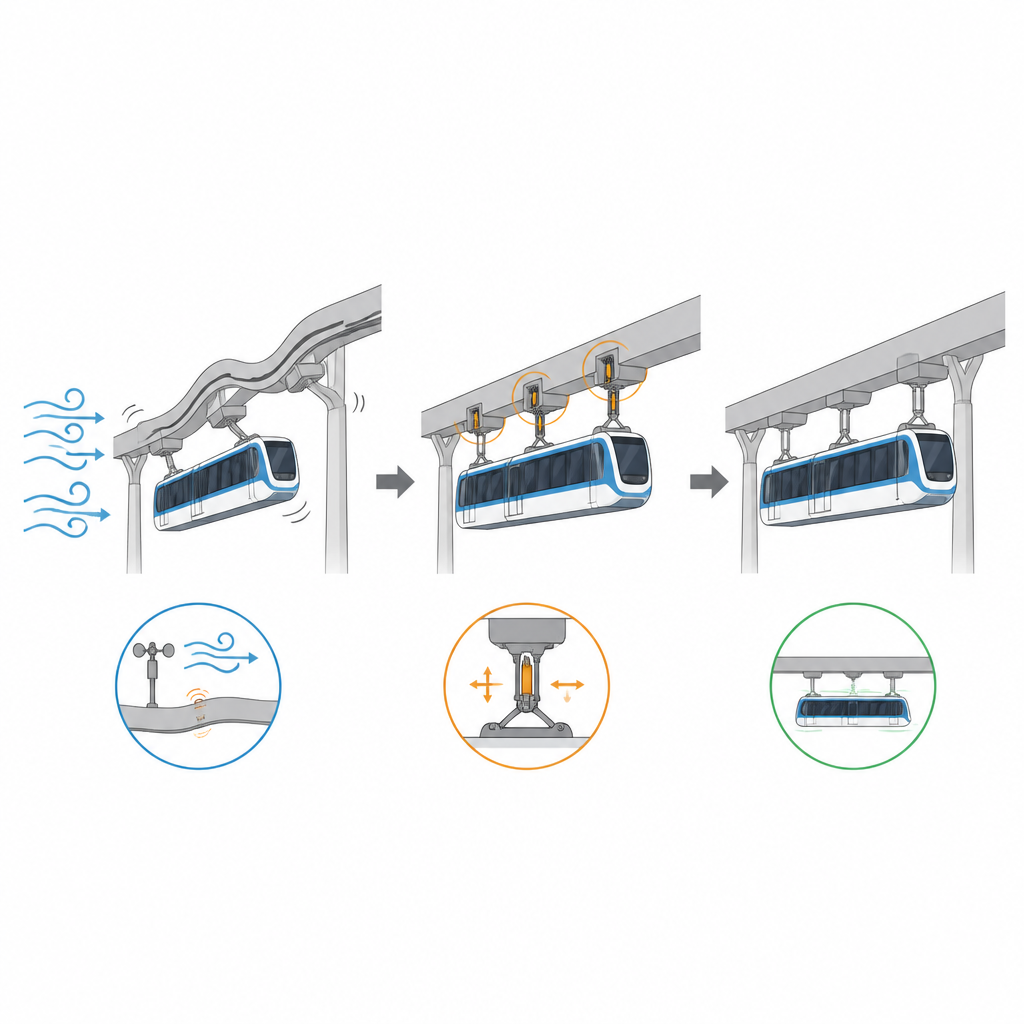
Les monorails suspendus apparaissent dans de plus en plus de villes et d'espaces touristiques parce qu'ils sont discrets, compacts et relativement peu coûteux à construire. Pourtant, les passagers peuvent ressentir des oscillations et des rebonds sensibles lorsque des rafales de vent et de petites imperfections de la voie agissent simultanément. Cette étude explore comment maîtriser ces mouvements à l'aide d'un système de commande intelligent qui ajuste discrètement des actionneurs cachés sous la voiture afin que le trajet paraisse plus stable et plus sûr.
Comment le vent et la voie secouent les trains suspendus
À la différence des trains conventionnels qui roulent au-dessus des rails, les voitures de monorail suspendues pendent d'une poutre, ce qui les rend plus sensibles aux vents latéraux et aux irrégularités du guide. Les vents transversaux poussent la voiture sur le côté tandis que de petites variations de hauteur et des désalignements de la poutre secouent les roues. Ces effets se produisent en même temps et dans les directions latérale et verticale, entraînant des mouvements couplés qui peuvent nuire au confort et même à la sécurité. Les recherches antérieures se sont principalement intéressées à la dynamique du système, au réglage de ressorts et d'amortisseurs passifs, ou à l'utilisation de dispositifs semi-actifs, mais ont accordé moins d'attention au contrôle actif qui gère conjointement les mouvements latéraux et verticaux dans des limites matérielles réalistes.
Construire un jumeau numérique réaliste du train
Pour concevoir un contrôleur opérationnel, les auteurs ont d'abord créé un modèle numérique détaillé d'un véhicule monorail suspendu, incluant la caisse, les bogies, les roues et les éléments de suspension. Ils ont ensuite affiné ce modèle à l'aide de mesures réelles provenant d'un train en service. En ajustant des paramètres clés jusqu'à ce que les indices de qualité de roulement simulés correspondent aux valeurs mesurées, ils ont obtenu un « jumeau numérique » basé sur les données qui se comporte de manière très proche du véhicule réel sous des conditions de voie et de vent réelles. Ils ont également modélisé statistiquement les vents naturels et les imperfections de la voie afin que le train numérique subisse des rafales et des bosses réalistes lors des tests.
Laisser le véhicule décider où les actionneurs sont les plus utiles
Plutôt que de deviner où placer les actionneurs, l'équipe a réalisé une étude de sensibilité pour déterminer quels emplacements et quelles directions influencent le plus les oscillations latérales et verticales de la voiture. Sur la base de ce classement, ils ont retenu sept positions d'actionneurs sur les bogies et les poutres de suspension. Ils ont ensuite réalisé des simulations en excitant chaque actionneur l'un après l'autre et ont utilisé un ajustement simple pour apprendre comment chaque force modifie les accélérations de la voiture. Cela a produit une cartographie reliant les forces des actionneurs au mouvement de la voiture, formant la base pour répartir l'effort de commande d'une manière physiquement réaliste.
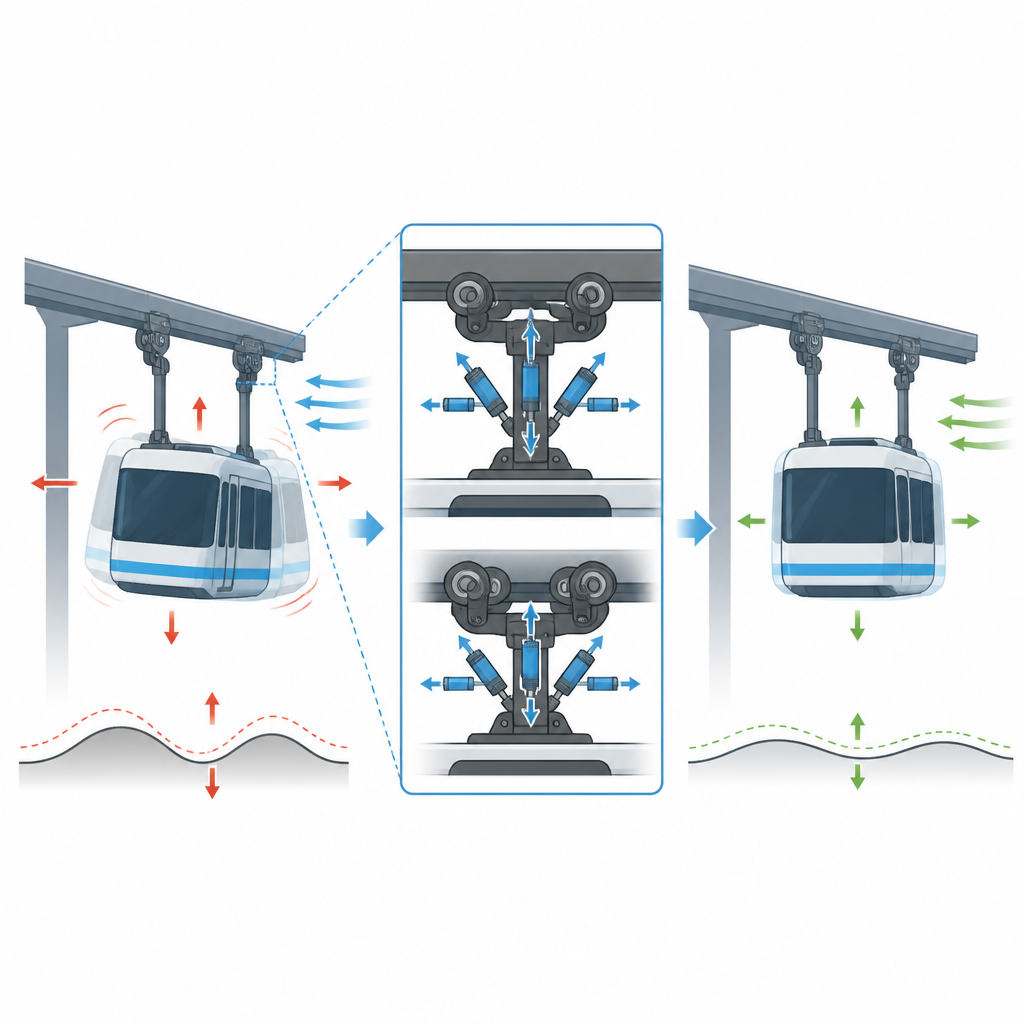
Une approche de commande en deux couches pour un trajet plus calme
Le cœur du travail est un cadre de commande en deux couches. Dans la couche interne, des régulateurs par rétroaction simples surveillent les accélérations latérales et verticales de la voiture et génèrent des demandes de commande « virtuelles » destinées à ramener ces valeurs vers zéro. Deux variantes sont utilisées : un régulateur traditionnel dont les gains sont réglés par une recherche génétique, et une version floue auto-ajustable qui retune doucement ses propres gains en temps réel selon le niveau et la vitesse des mouvements. Dans la couche externe, un algorithme d'optimisation quadratique traduit ces demandes virtuelles en forces individuelles d'actionneurs, tout en respectant strictement les limites sur l'intensité de poussée ou de traction autorisée pour chaque actionneur.
Ce que disent les simulations sur le confort de roulement
Les chercheurs ont comparé trois régulateurs internes, tous utilisant la même couche d'allocation externe : un régulateur optimal classique, la rétroaction à gain fixe, et la rétroaction floue auto-ajustable. Sous les mêmes vents transversaux forts et irrégularités de voie, les trois ont réduit les vibrations par rapport à l'absence de contrôle. La version floue auto-ajustable a donné les meilleurs résultats au global, réduisant en moyenne les accélérations latérales et verticales d'environ un cinquième et abaissant les pics soudains d'environ un tiers. Les indices standards de qualité de roulement se sont également améliorés, et les traces de mouvement sont devenues plus lisses et moins saccadées dans le temps.
Ce que cela implique pour les futurs trajets en monorail
Pour un passager, le résultat principal de l'étude se traduit par un trajet plus calme et plus stable, même lorsque le vent souffle et que la voie est imparfaite. En combinant des mesures d'accélération simples avec une méthode intelligente de partage du travail entre plusieurs actionneurs, le cadre proposé maintient le mouvement du véhicule sous contrôle tout en restant dans des limites matérielles réalistes. Les auteurs notent que des travaux complémentaires sont nécessaires pour affiner les emplacements des actionneurs, gérer des effets matériels plus complexes et tester sur des trains réels, mais leurs résultats suggèrent qu'un contrôle actif soigneusement conçu pourrait rendre les monorails suspendus plus confortables et attractifs pour le transport urbain quotidien.
Citation: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Mots-clés: monorail suspendu, confort de trajet, contrôle des vibrations, commande PID, programmation quadratique