Clear Sky Science · ar
التحكم في استقرار عربات المونوريل المعلقة بناءً على PID وتخصيص برمجة رباعية الحد
لماذا تهم رحلات المونوريل الأكثر سلاسة
تظهر أنظمة المونوريل المعلقة في المزيد من المدن والمناطق ذات المناظر لأنّها هادئة، وموفرة للمساحة، ورخيصة نسبياً في البناء. ومع ذلك، قد يشعر الركاب بتأرجح وارتجاج ملحوظ عندما تتضافر هبات الريح مع المطبات الصغيرة في المسار. تستكشف هذه الدراسة كيفية ترويض تلك الحركة عبر نظام تحكم ذكي يضبط بهدوء المشغلات المخفية أسفل العربة لكي يشعر الركاب برحلة أكثر ثباتاً وأمناً.
كيف تُهَزّ القطارات المعلقة بالرياح والمسار
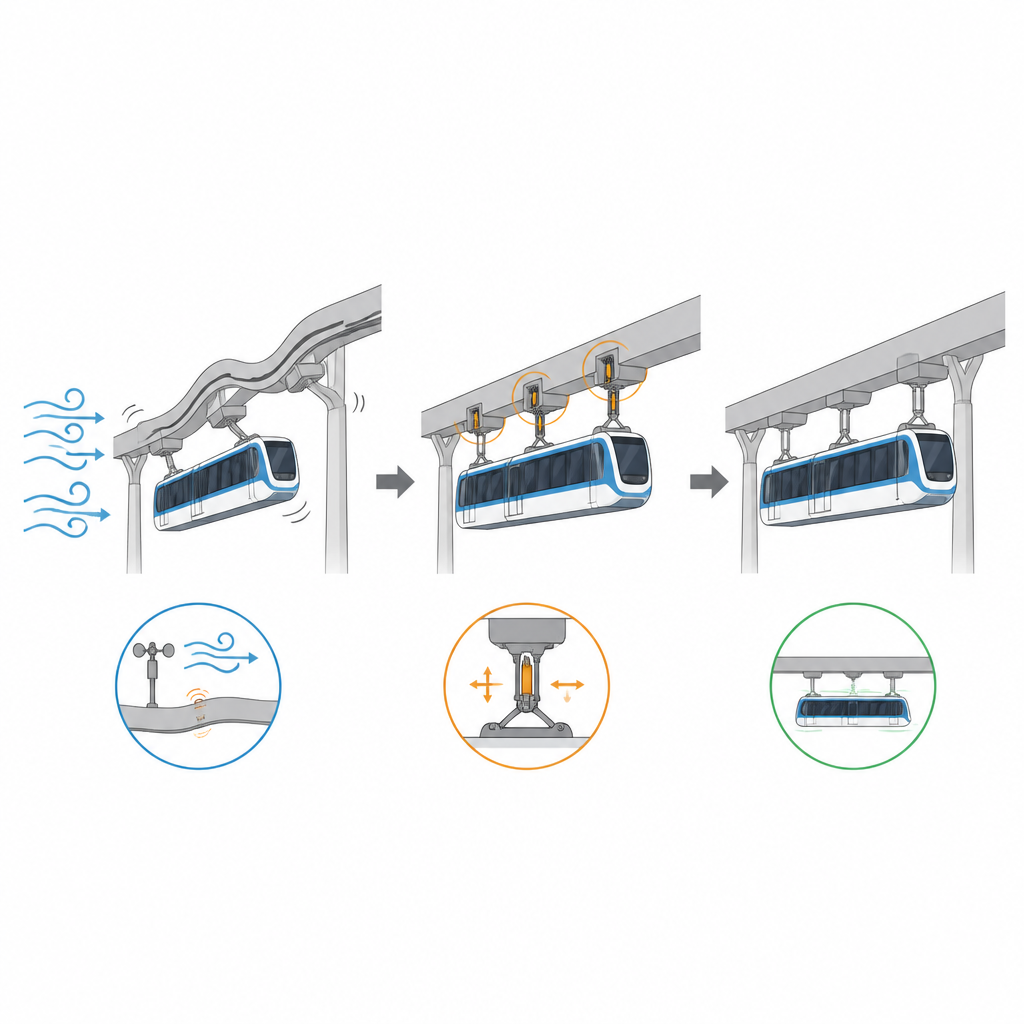
على عكس القطارات التقليدية التي تجلس فوق القضبان، تتدلّى عربات المونوريل من عارضة، ما يجعلها أكثر حساسية للرياح الجانبية وعدم استواء الممر. تدفع الرياح العرضية العربة من الجانب بينما تتسبب تغيّرات الارتفاع الصغيرة وسوء محاذاة العارضة في اهتزاز العجلات. تحدث هذه التأثيرات في الوقت نفسه وفي الاتجاهين الجانبي والرأسي، مما يؤدي إلى حركات مترابطة قد تؤثر على الراحة وحتى الأمان. بحث سابق ركّز في المقام الأول على كيفية حركة النظام، وكيفية ضبط النوابض والمخمدات السلبية، أو استخدام أجهزة شبه نشطة، لكنه اهتم بشكل أقل بالتحكم النشط الذي يتعامل مع الحركات الجانبية والعمودية سويةً تحت قيود الأجهزة الواقعية.
بناء توأم رقمي واقعي للقطار
لتصميم متحكم يعمل عملياً، أنشأ المؤلفون أولاً نموذج كمبيوتري مفصّل لعربة مونوريل معلقة، بما في ذلك جسم العربة، والبوغيات، والعجلات، وأجزاء التعليق. ثم راجعوا هذا النموذج باستخدام قياسات من العالم الحقيقي من قطار عامل. من خلال تعديل المعاملات الرئيسية حتى تتطابق درجات جودة الركوب المحاكاة مع المقاسة، حصلوا على «توأم رقمي» مستند إلى بيانات يتصرف بشكل مماثل للمركبة الحقيقية تحت ظروف المسار والرياح الواقعية. كما نمذَجوا الرياح الطبيعية وعيوب المسار إحصائياً لكي يختبر القطار الرقمي هبات ومطبات واقعية أثناء التجارب.
ترك العربة تقرر أين تكون أهمية المشغلات
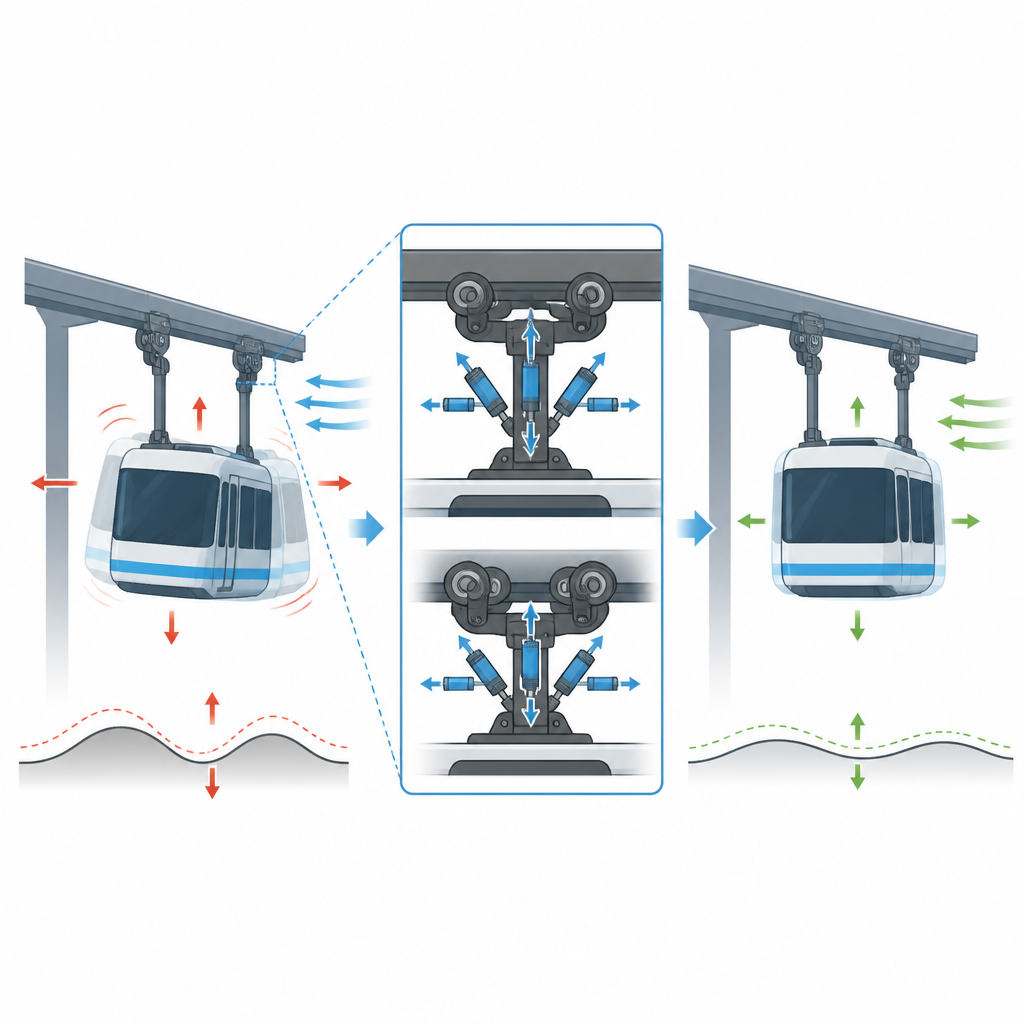
بدلاً من التخمين في أماكن وضع المشغلات، استخدم الفريق دراسة حساسية لرؤية أي الأماكن والاتجاهات تؤثر بقوة أكبر على مقدار اهتزاز العربة جانبياً وعمودياً. بناءً على هذا الترتيب، اختاروا سبع مواضع للمشغلات على البوغيات وعاقد العارضة. ثم أجروا محاكاة حيث يُثار كل مشغل على حدة واستخدموا ملاءمة بسيطة لتعلّم كيف يغير كل قوة تسارعات العربة. أنتج ذلك خريطة تربط قوى المشغلات بحركة العربة، مكوّنة الأساس لتوزيع جهد التحكم بطريقة فيزيائية واقعية.
نهج تحكم ذو طبقتين لرحلة أكثر هدوءاً
جوهر العمل هو إطار تحكم ذو طبقتين. في الطبقة الداخلية، تراقب متحكمات تغذية راجعة بسيطة تسارعات العربة الجانبية والعمودية وتولّد طلبات تحكم «افتراضية» تهدف إلى دفع تلك القيم نحو الصفر. تُستخدم نسختان: متحكم تقليدي تُعد مكاسبه عبر بحث جيني، ونسخة ضبابية ذات ضبط ذاتي تكيّف مكاسبها برفق أثناء تغير مستوى وسرعة الحركة. في الطبقة الخارجية، يترجم خوارزم تحسين رباعي الطلبات الافتراضية هذه إلى قوى فردية للمشغلات، مع الالتزام الصارم بحدود قوة الدفع والسحب المسموح بها لكل مشغل.
ماذا تقول المحاكاة عن راحة الركوب
قارن الباحثون ثلاث متحكمات داخلية، كلها تستخدم نفس طبقة التخصيص الخارجية: متحكم مثالي كلاسيكي، وتغذية راجعة ذات مكسب ثابت، وتغذية راجعة ضبابية ذات ضبط ذاتي. تحت نفس الرياح العرضية القوية وشذوذات المسار، خفّضت الثلاثة جميعها الاهتزاز مقارنة بترك النظام دون تحكم. أدت النسخة الضبابية ذات الضبط الذاتي إلى الأداء الأفضل عموماً، حيث قلّلت من متوسط التسارعات الجانبية والعمودية بحوالي خمسها وخفّضت القمم المفاجئة بنحو الثلث. تحسنت أيضاً مؤشرات جودة الركوب القياسية، وأصبحت مسارات الحركة أنعم وأقل تقطعاً مع الزمن.
ماذا يعني هذا لسفر المونوريل في المستقبل
بالنسبة للراكب، يتحول النتيجة الأساسية للدراسة إلى رحلة أكثر هدوءاً وثباتاً حتى عندما تهب الرياح ويكون المسار أقل من المثالي. من خلال الجمع بين قياسات تسارع بسيطة وطريقة ذكية لتقاسم العمل بين عدة مشغلات، يحافظ الإطار المقترح على حركة المركبة ضمن نطاقات مقبولة مع البقاء داخل حدود الأجهزة الواقعية. يشير المؤلفون إلى الحاجة لمزيد من العمل لصقل تخطيطات المشغلات، ومعالجة تأثيرات الأجهزة الأكثر تعقيداً، والاختبار على قطارات حقيقية، لكن نتائجهم توحي بأن التحكم النشط المصمم بعناية يمكن أن يجعل المونوريل المعلق أكثر راحة وجاذبية للنقل الحضري اليومي.
الاستشهاد: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
الكلمات المفتاحية: مونوريل معلق, راحة الركوب, التحكم في الاهتزاز, تحكم PID, برمجة رباعية الحد