Clear Sky Science · it
Controllo della stabilità dei veicoli monorotaia sospesi basato su PID e allocazione tramite programmazione quadratica
Perché un viaggio in monorotaia più fluido è importante
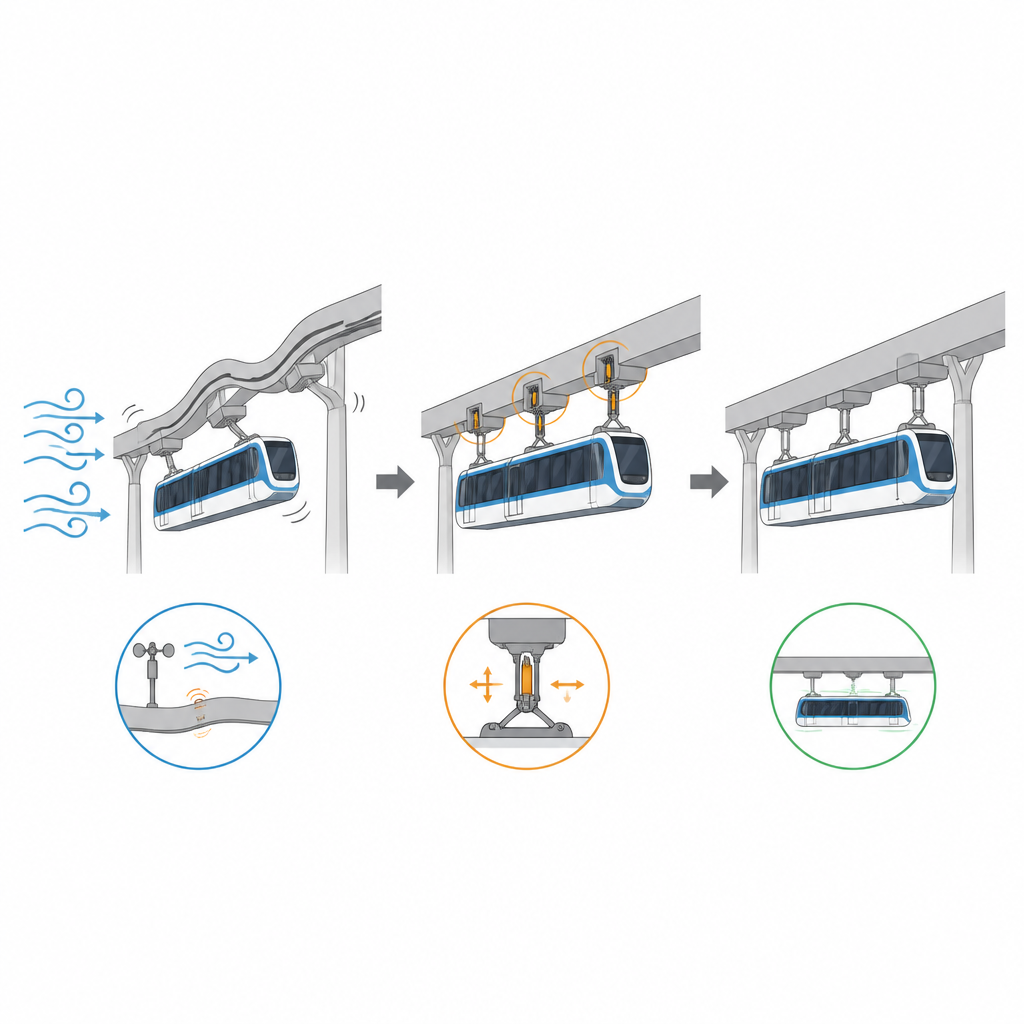
Le monorotaie sospese stanno comparendo in più città e aree panoramiche perché sono silenziose, compatte e relativamente economiche da costruire. Tuttavia i passeggeri possono percepire marcate oscillazioni e rimbalzi quando raffiche di vento e piccole irregolarità della rotaia agiscono insieme. Questo studio esplora come domare tali movimenti mediante un sistema di controllo intelligente che regola silenziosamente attuatori nascosti sotto il vagone in modo che la corsa risulti più stabile e sicura.
Come i treni sospesi vengono scossi da vento e rotaia
A differenza dei treni convenzionali che poggiano sulle rotaie, i vagoni delle monorotaie sospese pendono da una trave, il che li rende più sensibili ai venti laterali e alle guide irregolari. I venti trasversali spingono il vagone di lato mentre piccole variazioni di altezza e disallineamenti della trave scotennano le ruote. Questi effetti avvengono simultaneamente e in direzioni sia laterali sia verticali, portando a moti accoppiati che possono influire sul comfort e persino sulla sicurezza. Ricerche precedenti si sono concentrate principalmente sul come si muove il sistema, su come tarare molle e ammortizzatori passivi o sull'uso di dispositivi semi-attivi, dedicando meno attenzione al controllo attivo che gestisce contemporaneamente i moti laterali e verticali entro limiti realistici dell'hardware.
Costruire un gemello digitale realistico del treno
Per progettare un controller che funzioni nella pratica, gli autori hanno prima creato un modello computerizzato dettagliato di un veicolo monorotaia sospeso, includendo la carrozzeria, i carrelli, le ruote e le parti della sospensione. Hanno poi perfezionato questo modello usando misure reali provenienti da un treno in funzione. Regolando i parametri chiave fino a quando i punteggi di qualità di marcia simulati non corrispondevano a quelli misurati, hanno ottenuto un "gemello digitale" guidato dai dati che si comporta molto simile al veicolo reale in condizioni reali di rotaia e vento. Hanno inoltre modellato statisticamente i venti naturali e le imperfezioni della rotaia affinché il treno digitale sperimenti raffiche e asperità realistiche durante i test.
Lasciare che il veicolo decida dove gli attuatori contano di più
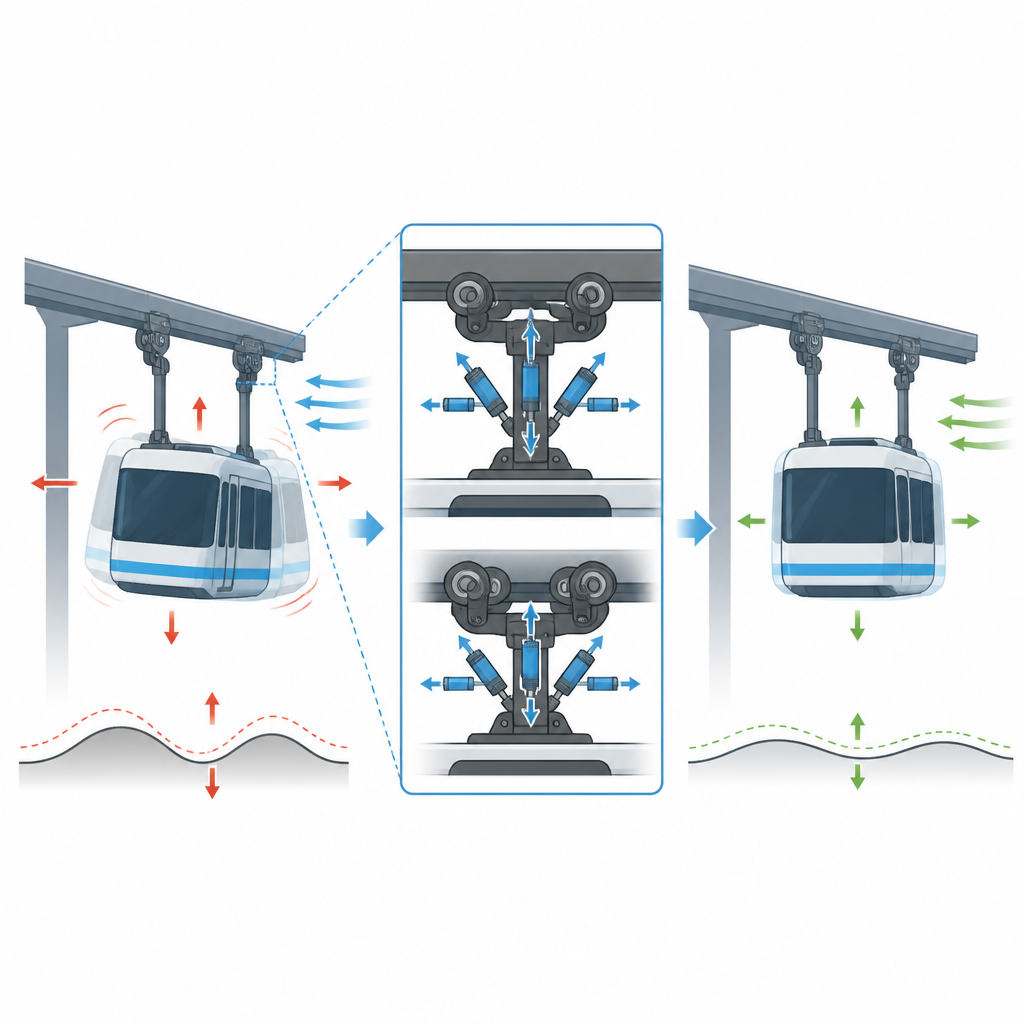
Piuttosto che ipotizzare dove posizionare gli attuatori, il team ha eseguito uno studio di sensibilità per vedere quali posizioni e direzioni incidono più fortemente su quanto il vagone oscilli lateralmente e verticalmente. Sulla base di questa classifica hanno scelto sette posizioni per gli attuatori sui carrelli e sulle travi di sospensione. Hanno quindi eseguito simulazioni in cui ogni attuatore veniva eccitato uno alla volta e hanno usato un semplice fitting per apprendere come ogni forza modifica le accelerazioni del vagone. Ciò ha prodotto una mappa che collega le forze degli attuatori al moto del vagone, formando la base per distribuire lo sforzo di controllo in modo fisicamente realistico.
Un approccio di controllo a due livelli per una corsa più calma
Il cuore del lavoro è un quadro di controllo a due livelli. Nel livello interno, semplici controllori di retroazione osservano le accelerazioni laterali e verticali del vagone e generano richieste di controllo "virtuali" intese a riportare quei valori verso zero. Si usano due varianti: un controllore tradizionale i cui guadagni vengono tarati tramite una ricerca genetica, e una versione fuzzy auto-tarabile che ritaratura dolcemente i propri guadagni in tempo reale mentre cambiano livello e velocità del moto. Nel livello esterno, un algoritmo di ottimizzazione quadratica traduce queste richieste virtuali in forze individuali per gli attuatori, rispettando rigorosamente i limiti su quanto ogni attuatore è autorizzato a spingere o tirare.
Cosa dicono le simulazioni sul comfort di marcia
I ricercatori hanno confrontato tre controllori interni, tutti usando lo stesso strato esterno di allocazione: un controllore ottimale classico, la retroazione a guadagno fisso e la retroazione fuzzy auto-tarabile. Sotto gli stessi forti venti trasversali e le irregolarità della rotaia, tutti e tre hanno ridotto le vibrazioni rispetto al sistema non controllato. La versione fuzzy auto-tarabile ha ottenuto le migliori prestazioni complessive, riducendo le accelerazioni medie laterali e verticali di circa un quinto e abbassando i picchi improvvisi di circa un terzo. Anche gli indici standard di qualità di marcia sono migliorati e le tracce del moto sono risultate più regolari e meno frammentate nel tempo.
Cosa significa questo per i futuri viaggi in monorotaia
Per un passeggero, il risultato principale dello studio si traduce in una corsa più silenziosa e più stabile anche quando soffia il vento e la rotaia non è perfetta. Combinando misure di accelerazione semplici con un modo intelligente di condividere il lavoro tra più attuatori, il quadro proposto mantiene sotto controllo il moto del veicolo rimanendo entro limiti hardware realistici. Gli autori osservano che sono necessari ulteriori lavori per perfezionare il layout degli attuatori, gestire effetti hardware più complessi e testare su treni reali, ma i risultati suggeriscono che un controllo attivo accuratamente progettato potrebbe rendere le monorotaie sospese più confortevoli e attraenti per il trasporto urbano quotidiano.
Citazione: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Parole chiave: monorotaia sospesa, comfort di marcia, controllo delle vibrazioni, controllo PID, programmazione quadratica