Clear Sky Science · sv
Stabilitetsstyrning för upphängda monorailfordon baserat på PID och kvadratisk programmeringsallokering
Varför en mjukare monorailfärd är viktig
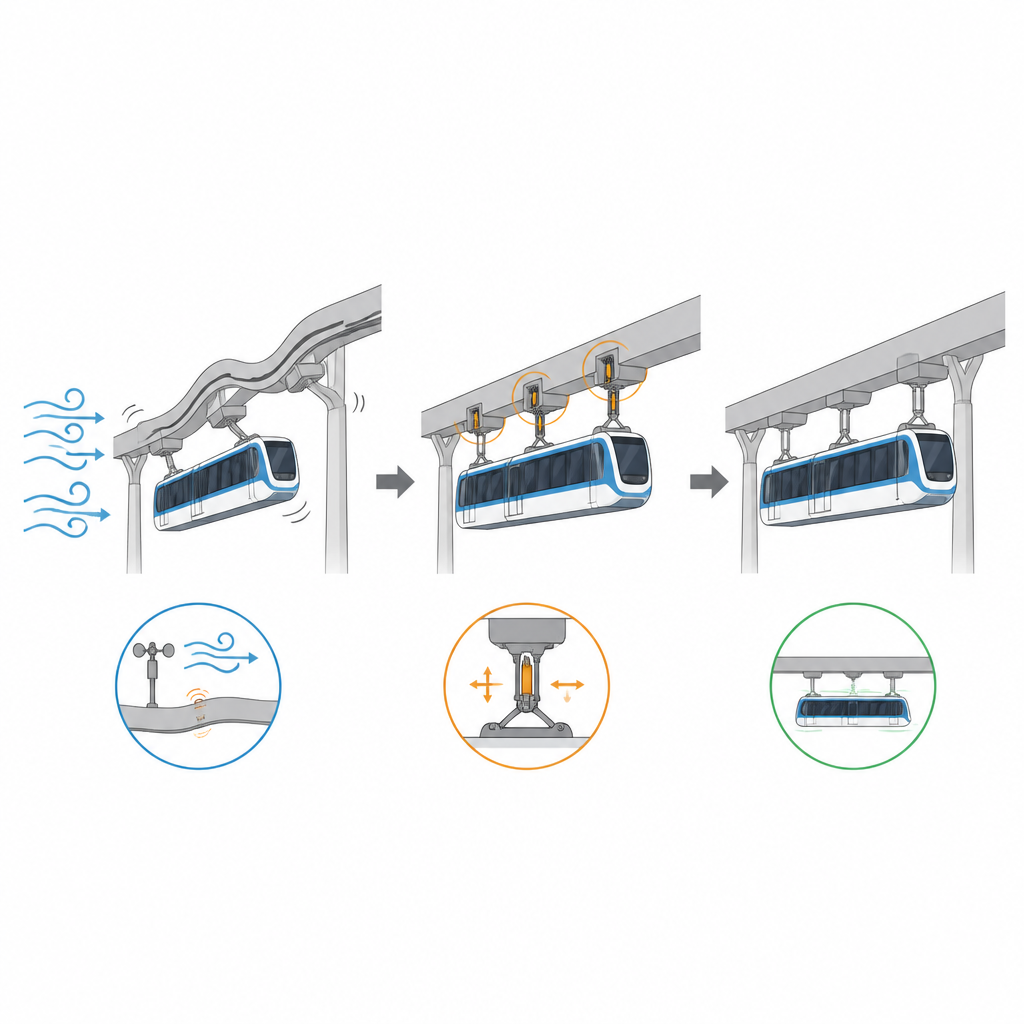
Hängande monorail dyker upp i fler städer och turistmiljöer eftersom de är tysta, kompakta och relativt billiga att bygga. Passagerare kan dock känna tydligt svajande och studsig rörelse när vindbyar och små ojämnheter i spåret samverkar. Denna studie undersöker hur man kan tygla dessa rörelser med ett smart styrsystem som diskret justerar dolda ställdon under vagnen så att resan känns stabilare och säkrare.
Hur upphängda tåg skakas av vind och spår
Till skillnad från konventionella tåg som står ovanpå rälsen hänger monorailvagnar från en balk, vilket gör dem mer känsliga för sidvindar och ojämna ledstänger. Tvärvindar trycker vagnen från sidan medan små höjdskillnader och feltillpassningar i balken skakar hjulen. Dessa effekter sker samtidigt och i både sid- och vertikal riktning, vilket leder till ihopkopplade rörelser som kan påverka komfort och till och med säkerhet. Tidigare forskning har främst studerat systemets rörelse, hur passiva fjädrar och dämpare ska ställas in eller hur semiautomatiska enheter kan användas, men har ägnat mindre uppmärksamhet åt aktiv reglering som hanterar sid- och vertikalrörelser tillsammans under realistiska hårdvarubegränsningar.
Att bygga en realistisk digital tvilling av tåget
För att utforma en regulator som fungerar i praktiken skapade författarna först en detaljerad datormodell av ett upphängt monorailfordon, inklusive kaross, boggier, hjul och fjädringskomponenter. De förfinade sedan modellen med verkliga mätvärden från ett driftande tåg. Genom att justera nyckelparametrar tills simulerade mått på körkomfort matchade de uppmätta, fick de en datadriven "digital tvilling" som beter sig mycket likt det faktiska fordonet under verkliga spår- och vindförhållanden. De modellerade även naturliga vindar och spårimperfektioner statistiskt så att den digitala vagnen utsätts för realistiska byar och gupp under testning.
Låta fordonet avgöra var ställdon har mest betydelse
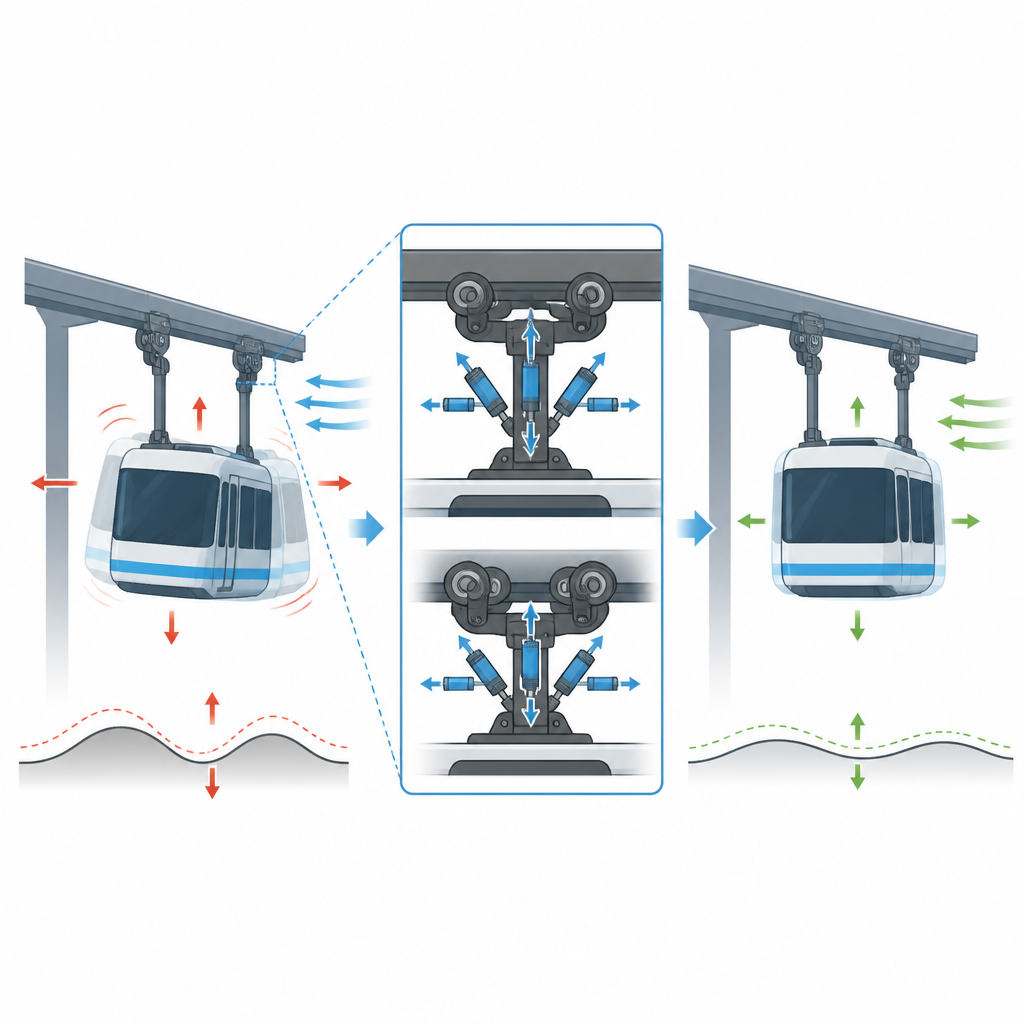
I stället för att gissa var ställdon ska placeras använde teamet en känslighetsstudie för att se vilka lägen och riktningar som mest påverkar hur mycket vagnen skakar i sidled och vertikalt. Baserat på denna rangordning valde de sju ställdonpositioner på boggierna och hängbalkarna. De körde sedan simuleringar där varje ställdon exciterades en i taget och använde enkel anpassning för att lära sig hur varje kraft ändrar vagnens accelerationer. Detta gav en karta som länkar ställdonskrafter till vagnens rörelser och utgör grunden för att fördela styrinsatsen på ett fysiskt realistiskt sätt.
En tvåskiktsmetod för lugnare körning
Kärnan i arbetet är ett tvåskikts styrramverk. I det inre skiktet övervakar enkla återkopplingsregulatorer vagnens sid- och vertikalaccelerationer och genererar "virtuella" styrkrav avsedda att pressa dessa värden mot noll. Två varianter används: en traditionell regulator vars förstärkningsvärden ställs in med en genetisk sökning, och en fuzzy självjusterande version som försiktigt omställer sina egna förstärkningsvärden i realtid när rörelsens nivå och hastighet förändras. I det yttre skiktet översätter en kvadratisk optimeringsalgoritm dessa virtuella krav till individuella ställdonskrafter, samtidigt som den strikt respekterar begränsningar för hur hårt varje ställdon får trycka eller dra.
Vad simuleringarna säger om komforten
Forskarlaget jämförde tre inre regulatorer, alla med samma yttre allokeringslager: en klassisk optimal regulator, återkoppling med fast förstärkning och den fuzzy självjusterande återkopplingen. Under samma starka tvärvindar och spåroregelbundenheter minskade alla tre vibrationerna jämfört med att lämna systemet oreglerat. Den fuzzy självjusterande versionen presterade bäst totalt sett, och minskade de genomsnittliga sid- och vertikalaccelerationerna med cirka en femtedel och sänkte plötsliga toppar med ungefär en tredjedel. Standardiserade mått på körkomfort förbättrades också, och rörelsespåren blev jämnare och mindre hackiga över tid.
Vad detta betyder för framtida monorailresor
För en passagerare översätts studiens huvudresultat till en tystare, mer stabil färd även när vinden blåser och spåret är mindre än perfekt. Genom att kombinera enkla accelerationsmätningar med ett smart sätt att fördela arbetet mellan flera ställdon håller det föreslagna ramverket fordonets rörelser i schack samtidigt som det håller sig inom realistiska hårdvarubegränsningar. Författarna påpekar att ytterligare arbete behövs för att förfina ställdonsplaceringar, hantera mer komplexa hårdvarueffekter och testa på verkliga tåg, men deras resultat tyder på att noggrant utformad aktiv reglering kan göra upphängda monorail mer bekväma och attraktiva för vardaglig stadstrafik.
Citering: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Nyckelord: upphängd monorail, reskomfort, vibrationsreglering, PID-reglering, kvadratisk programmering