Clear Sky Science · ru
Стабилизация подвесных монорельсовых вагонов на основе ПИД и квадратичного программирования распределения усилий
Почему важна более плавная поездка на монорельсе
Подвесные монорельсы появляются в большем числе городов и туристических зон, поскольку они тихие, компактные и относительно недорогие в строительстве. Тем не менее пассажиры могут ощутить заметное раскачивание и подпрыгивания при срывах ветра и мелких неровностях рельса. В этом исследовании рассматривается, как укротить эти движения с помощью интеллектуальной системы управления, которая незаметно регулирует скрытые актуаторы под вагоном, чтобы поездка казалась более устойчивой и безопасной.
Как ветер и путь расшатывают подвесные поезда
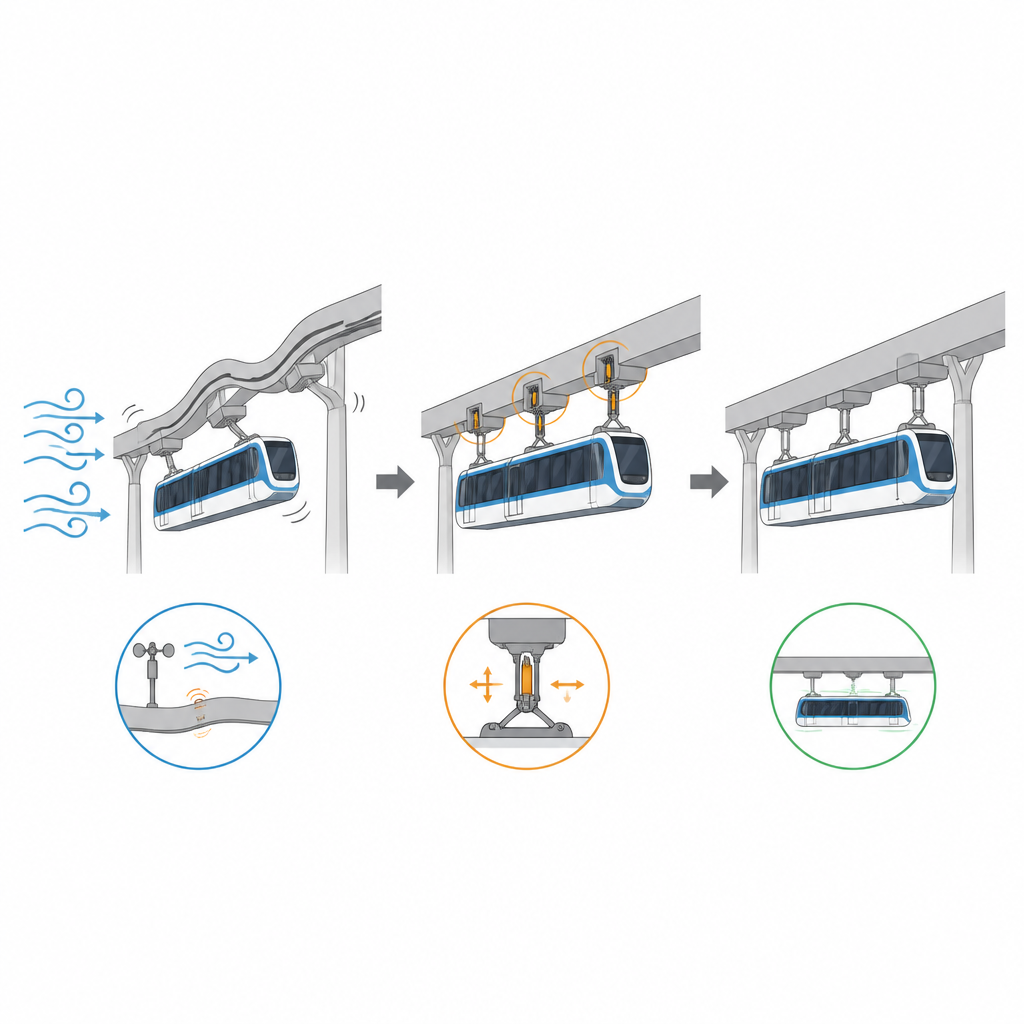
В отличие от обычных поездов, опирающихся на рельсы сверху, вагоны подвесного монорельса висят на балке, что делает их более чувствительными к боковому ветру и неровностям направляющей. Боковой ветер толкает вагон в сторону, а крошечные изменения высоты и несовпадения в балке сотрясают колёса. Эти эффекты происходят одновременно в боковом и вертикальном направлениях, приводя к взаимосвязанным движениям, которые влияют на комфорт и даже на безопасность. Ранние исследования в основном изучали динамику системы, настройку пассивных пружин и демпферов или применение полупассивных устройств, но уделяли меньше внимания активному управлению, которое одновременно справляется с боковыми и вертикальными движениями при реалистичных ограничениях аппаратуры.
Создание реалистичной цифровой копии поезда
Чтобы спроектировать контроллер, работающий на практике, авторы сначала создали детальную компьютерную модель подвесного монорельсового вагона, включающую кузов, тележки, колёса и элементы подвески. Затем они уточнили эту модель, используя реальные измерения с действующего поезда. Подбирая ключевые параметры до тех пор, пока показатели качества поездки в симуляции не совпали с измеренными, они получили основанный на данных «цифровой двойник», который ведёт себя похоже на реальное транспортное средство при реальных условиях пути и ветра. Также они статистически смоделировали естественные порывы ветра и дефекты пути, чтобы цифровой вагон испытывал реалистичные порывы и неровности в ходе испытаний.
Позволить вагону решать, где актуаторы наиболее важны
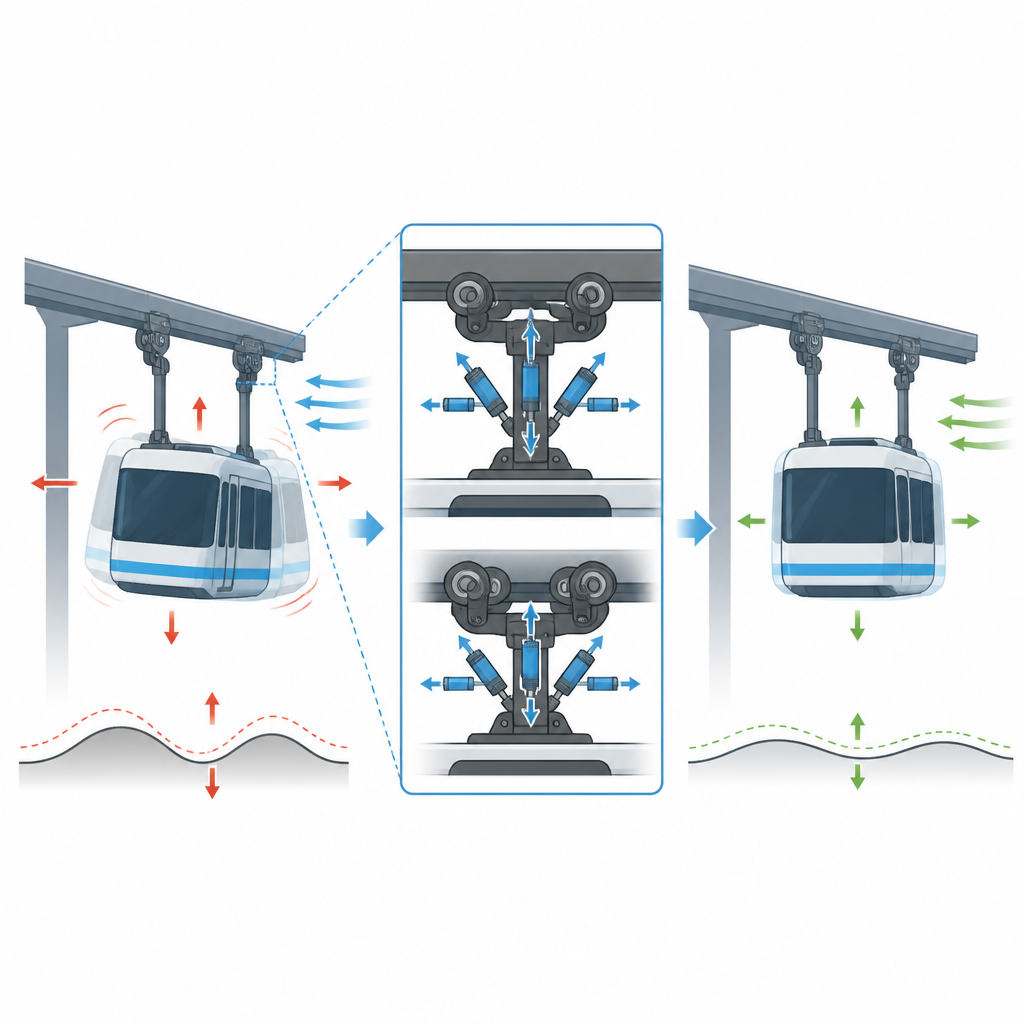
Вместо того чтобы гадать, где размещать актуаторы, команда провела исследование чувствительности, чтобы увидеть, какие места и направления сильнее всего влияют на боковые и вертикальные колебания вагона. На основании этого ранжирования они выбрали семь позиций актуаторов на тележках и подвесных балках. Затем были проведены симуляции, в которых каждый актуатор возбуждали по очереди, и применялась простая аппроксимация, чтобы выяснить, как каждое действие изменяет ускорения вагона. Это дало карту, связывающую силы актуаторов с движением вагона, что стало основой для распределения управляющих усилий в физически реалистичной форме.
Двухуровневый подход к более спокойной поездке
Суть работы — двухуровневая структура управления. На внутреннем уровне простые обратные регуляторы отслеживают боковые и вертикальные ускорения вагона и формируют «виртуальные» управляющие команды, направленные на сведение этих значений к нулю. Применяются два варианта: традиционный регулятор с коэффициентами, подобранными генетическим поиском, и нечеткая самонастраивающаяся версия, мягко перенастраивающая собственные коэффициенты в реальном времени по мере изменения уровня и скорости движения. На внешнем уровне квадратичная оптимизация переводит эти виртуальные команды в индивидуальные силы для актуаторов, строго соблюдая ограничения на то, насколько сильно каждый актуатор может толкать или тянуть.
Что говорят симуляции о комфорте поездки
Исследователи сравнили три внутренних регулятора при одинаковом внешнем слое распределения: классический оптимальный контроллер, фиксированный ПИД и нечеткий самонастраивающийся ПИД. При одинаковых сильных боковых ветрах и неровностях пути все три варианта снизили вибрацию по сравнению с отсутствием управления. Нечеткий самонастраивающийся вариант показал наилучшие результаты в целом, снизив средние боковые и вертикальные ускорения примерно на пятую часть и уменьшив внезапные пики примерно на треть. Также улучшились стандартные индексы качества поездки, а временные графики движения стали более плавными и менее прерывистыми.
Что это значит для будущих поездок на монорельсе
Для пассажира главный вывод исследования означает более тихую и устойчивую поездку даже при ветре и несовершенном пути. Сочетая простые измерения ускорений с интеллектуальным способом распределения работы между несколькими актуаторами, предложенная рамочная система удерживает движение вагона под контролем, оставаясь в рамках реалистичных аппаратных ограничений. Авторы отмечают, что необходима дальнейшая работа по оптимизации расположения актуаторов, учёту более сложных эффектов аппаратуры и испытаниям на реальных поездах, но их результаты указывают на то, что грамотно спроектированное активное управление может сделать подвесные монорельсы более комфортными и привлекательными для повседневного городского транспорта.
Цитирование: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Ключевые слова: подвесной монорельс, комфорт поездки, управление вибрацией, ПИД-регулятор, квадратичное программирование