Clear Sky Science · nl
Stabiliteitsregeling van zwevende monorailvoertuigen gebaseerd op PID en allocatie via kwadratisch programmeren
Waarom een soepelere monorailrit belangrijk is
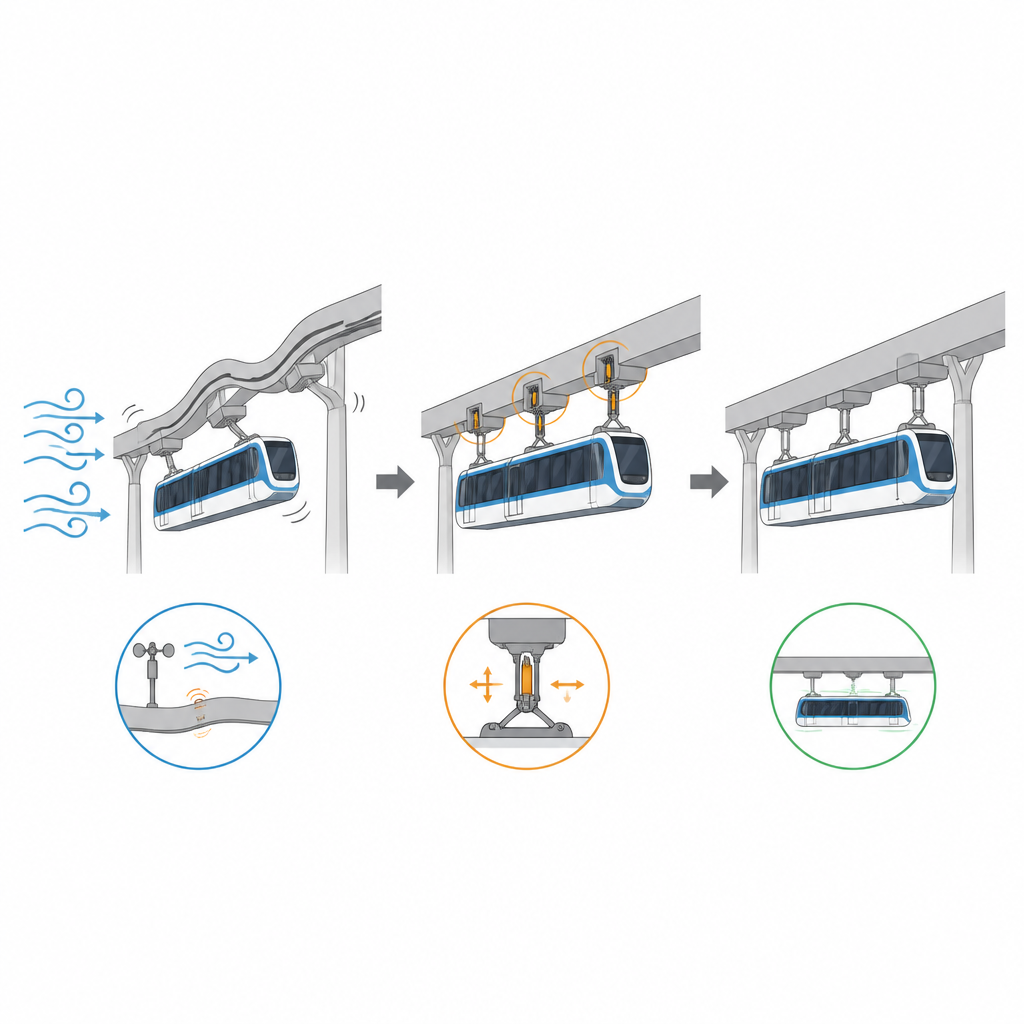
Hangende monorails verschijnen in steeds meer steden en toeristische gebieden omdat ze stil, compact en relatief goedkoop te bouwen zijn. Reizigers kunnen echter merkbaar slingeren en stuiteren voelen wanneer windvlagen en kleine spoorhobbels samen optreden. Deze studie onderzoekt hoe je die beweging kunt temmen met een slim regelsysteem dat stil verborgen actuatoren onder de wagen aanstuurt, zodat de rit stabieler en veiliger aanvoelt.
Hoe zwevende treinen door wind en spoor geschud worden
In tegenstelling tot conventionele treinen die boven op rails rijden, hangen monorailwagens aan een ligger, waardoor ze gevoeliger zijn voor zijwind en oneffenheden in de geleiderail. Dwarswind duwt de wagen van opzij terwijl kleine hoogteveranderingen en misalignments in de ligger de wielen opschudden. Deze effecten treden gelijktijdig op en in zowel zijdelingse als verticale richtingen, wat leidt tot gekoppelde bewegingen die zowel comfort als veiligheid kunnen beïnvloeden. Eerdere onderzoeken keken vooral naar hoe het systeem beweegt, hoe passieve veren en dempers af te stemmen zijn of hoe semi-actieve apparaten toe te passen, maar besteedden minder aandacht aan actieve regeling die zijdelingse en verticale bewegingen samen afhandelt binnen realistische hardwarebeperkingen.
Het bouwen van een realistische digitale tweeling van de trein
Om een regelaar te ontwerpen die in de praktijk werkt, maakten de auteurs eerst een gedetailleerd computermodel van een hangende monorailwagen, inclusief carrosserie, draaistellen, wielen en ophangingsonderdelen. Ze verfijnden dit model vervolgens met behulp van metingen uit de praktijk van een rijdende trein. Door sleutelparameters aan te passen totdat de gesimuleerde ritkwaliteitscores overeenkwamen met de gemeten waarden, verkregen ze een datagestuurde "digitale tweeling" die zich onder reële spoor- en windcondities vergelijkbaar gedraagt met het echte voertuig. Ze modelleerden ook natuurlijke winden en spooronregelmatigheden statistisch zodat de digitale trein tijdens testscenario’s realistische windvlagen en hobbels ervaart.
Het voertuig laten beslissen waar actuatoren het meest van belang zijn
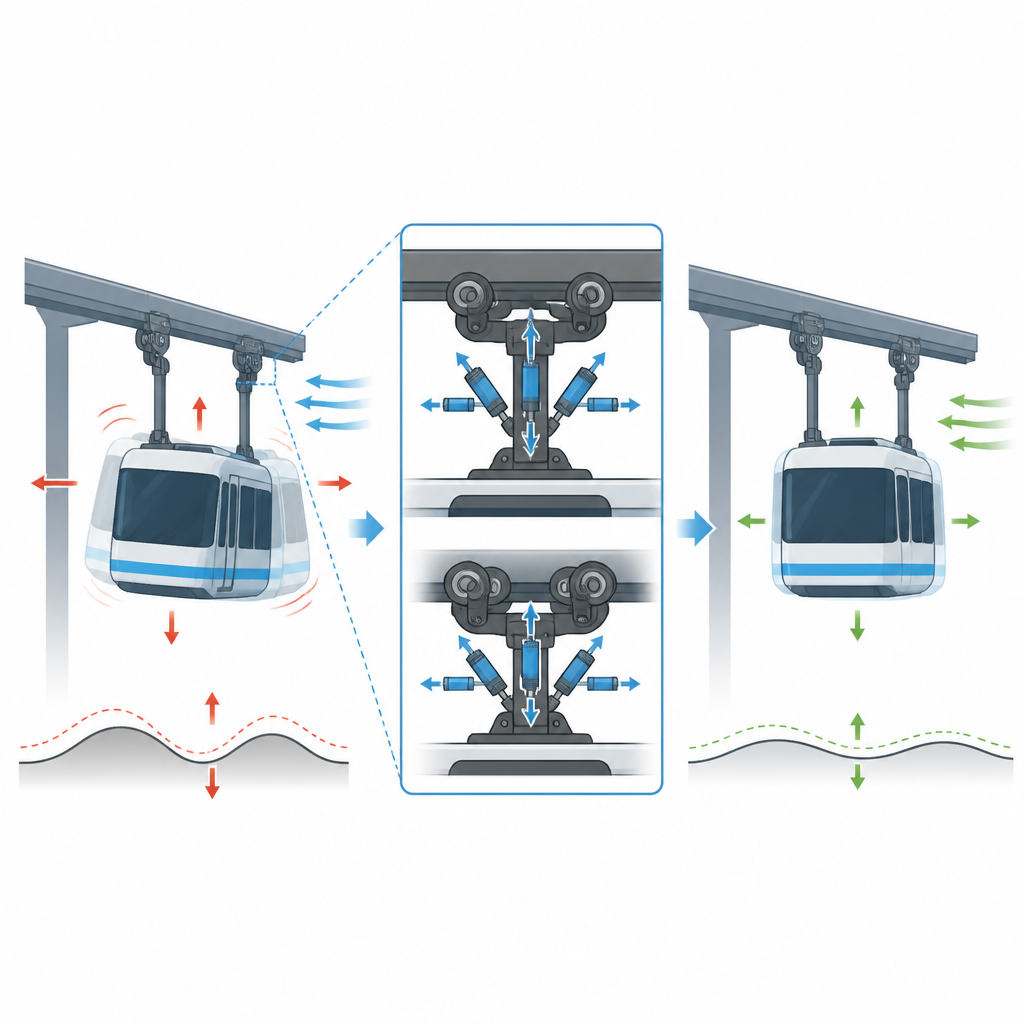
In plaats van te gokken waar actuatoren geplaatst moeten worden, gebruikte het team een sensitiviteitsstudie om te zien welke locaties en richtingen het sterkst beïnvloeden hoeveel de wagen zijwaarts en op-en-neer schudt. Op basis van deze rangschikking kozen ze zeven actuatorposities op de draaistellen en hangbalken. Vervolgens draaiden ze simulaties waarbij elke actuator één voor één werd aangesproken en gebruikten eenvoudige fitting om te leren hoe iedere kracht de acceleraties van de wagen verandert. Dit leverde een kaart op die actuatoren krachten koppelt aan de beweging van de wagen, en vormt de basis voor het fysiek realistisch verdelen van de regelinspanning.
Een tweelaagse regelaanpak voor een rustigere rit
De kern van het werk is een tweelaags regelkader. In de binnenste laag bewaken eenvoudige feedbackregelaars de zijdelingse en verticale acceleraties van de wagen en genereren ze "virtuele" regelvorderingen bedoeld om die waarden naar nul te duwen. Twee varianten worden gebruikt: een traditionele regelaar waarvan de versterkingen zijn afgestemd met een genetische zoektocht, en een fuzzy zelfaanpassende versie die zijn eigen versterkingen zachtjes bijstelt terwijl het niveau en de snelheid van de beweging veranderen. In de buitenste laag vertaalt een kwadratische optimalisatie-algoritme deze virtuele vorderingen naar individuele actuator-krachten, terwijl het strikt binnen de grenzen blijft van hoe hard elke actuator mag duwen of trekken.
Wat de simulaties zeggen over rijcomfort
De onderzoekers vergeleken drie binnenregelaars, die allemaal dezelfde buitenste allocatielaag gebruikten: een klassieke optimale regelaar, de vaste-versterking feedback en de fuzzy zelfaanpassende feedback. Onder dezelfde sterke dwarswinden en spooronregelmatigheden verminderden alle drie de trillingen vergeleken met geen regeling. De fuzzy zelfaanpassende versie presteerde overall het best, door de gemiddelde zijdelingse en verticale acceleraties met ongeveer een vijfde te verminderen en pieken ongeveer met een derde te verlagen. Standaard ritkwaliteitsindices verbeterden ook, en de bewegingssporen werden vloeiender en minder schokkerig in de tijd.
Wat dit betekent voor toekomstige monorailreizen
Voor een passagier vertaalt het belangrijkste resultaat van de studie zich naar een stillere, stabielere rit, zelfs wanneer de wind waait en het spoor niet perfect is. Door eenvoudige acceleratiemeting te combineren met een slimme manier om het werk over meerdere actuatoren te verdelen, houdt het voorgestelde kader de voertuigbeweging onder controle terwijl het binnen realistische hardwarebeperkingen blijft. De auteurs merken op dat vervolgwerk nodig is om actuatorlay-outs te verfijnen, complexere hardwareeffecten te behandelen en testen op echte treinen uit te voeren, maar hun resultaten suggereren dat zorgvuldig ontworpen actieve regeling hangende monorails comfortabeler en aantrekkelijker kan maken voor alledaags stedelijk vervoer.
Bronvermelding: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Trefwoorden: hangende monorail, rijcomfort, trillingregeling, PID-regeling, kwadratisch programmeren