Clear Sky Science · de
Stabilitätsregelung hängender Einschienenbahn-Fahrzeuge basierend auf PID- und quadratischer Programmzuweisung
Warum eine ruhigere Einschienenbahn-Fahrt wichtig ist
Hängende Einschienenbahnen erscheinen in immer mehr Städten und in touristischen Gebieten, weil sie leise, kompakt und relativ günstig zu bauen sind. Passagiere können jedoch spürbares Schwanken und Hüpfen wahrnehmen, wenn Böen und kleine Unebenheiten im Träger zusammenwirken. Diese Studie untersucht, wie sich diese Bewegungen zähmen lassen, indem ein intelligentes Regelungssystem leise versteckte Aktuatoren unter dem Wagen anpasst, sodass die Fahrt stabiler und sicherer wirkt.
Wie Wind und Gleis den hängenden Zug erschüttern
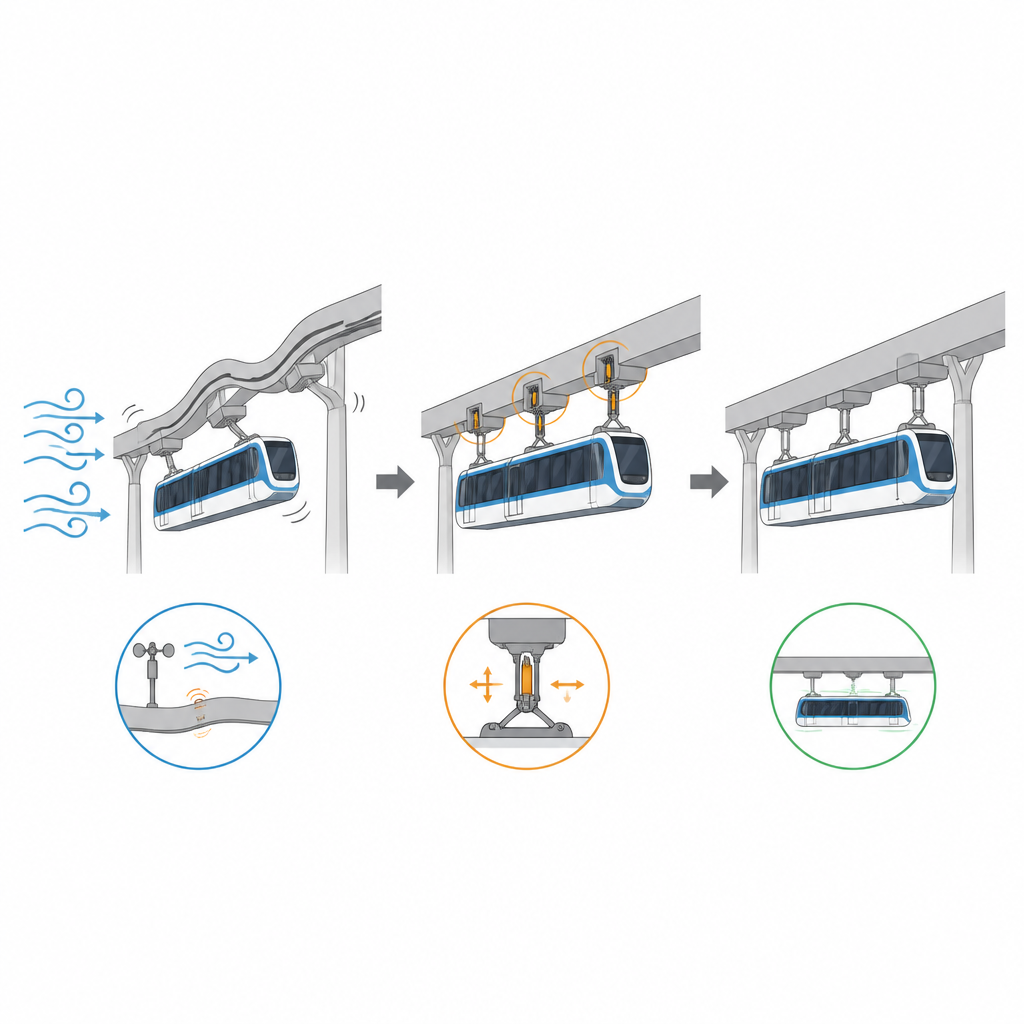
Im Gegensatz zu konventionellen Zügen, die auf Schienen laufen, hängen Einschienenbahnwagen unter einem Träger, was sie anfälliger für Seitenwinde und unebene Führungen macht. Seitenwinde drücken den Wagen seitlich, während winzige Höhenänderungen und Ausrichtungsfehler im Träger die Räder aufscheuchen. Diese Effekte treten gleichzeitig und in seitlicher wie vertikaler Richtung auf, was zu gekoppelten Bewegungen führt, die Komfort und sogar Sicherheit beeinträchtigen können. Frühere Forschung betrachtete vornehmlich das Systemverhalten, die Abstimmung passiver Federn und Dämpfer oder den Einsatz semi-aktiver Bauteile, widmete der aktiven Regelung, die seitliche und vertikale Bewegungen zusammen unter realistischen Hardwarebeschränkungen steuert, jedoch weniger Aufmerksamkeit.
Aufbau eines realistischen digitalen Zwillings des Zuges
Um einen Regler zu entwerfen, der in der Praxis funktioniert, erstellten die Autoren zuerst ein detailliertes Computermodell eines hängenden Einschienenbahnfahrzeugs, einschließlich Wagenkasten, Drehgestelle, Räder und Federungselemente. Dieses Modell verfeinerten sie anschließend mit Messdaten aus einem im Betrieb befindlichen Zug. Durch Anpassung maßgeblicher Parameter, bis die simulierten Fahrqualitätswerte mit den gemessenen übereinstimmten, erhielten sie einen datengetriebenen „digitalen Zwilling“, der sich unter realen Gleis- und Windbedingungen dem tatsächlichen Fahrzeugverhalten stark annähert. Außerdem modellierten sie natürliche Winde und Gleisunebenheiten statistisch, sodass der digitale Zug während der Tests realistische Böen und Stöße erfährt.
Das Fahrzeug entscheiden lassen, wo Aktuatoren am wichtigsten sind
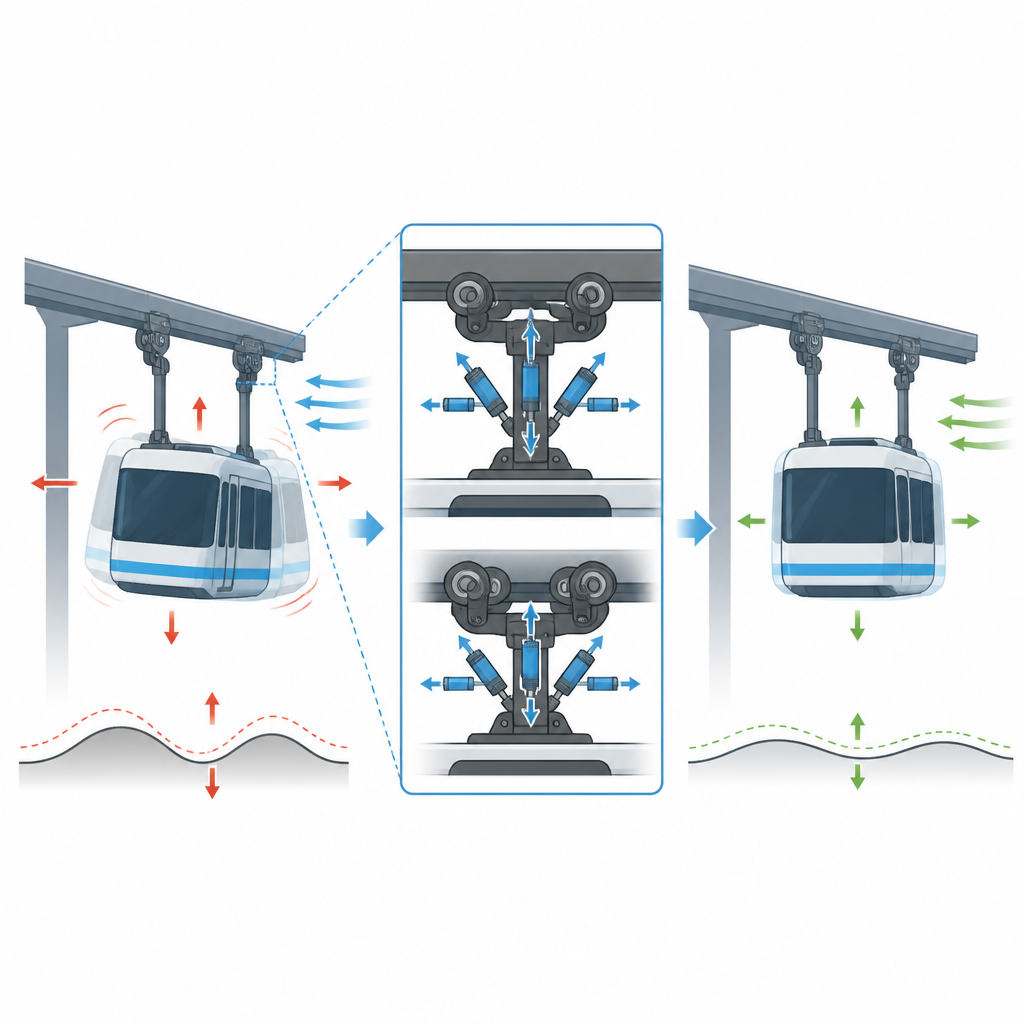
Anstatt zu raten, wo Aktuatoren zu platzieren sind, nutzte das Team eine Sensitivitätsstudie, um zu ermitteln, welche Positionen und Richtungen den größten Einfluss auf seitliche und vertikale Schwingungen des Wagens haben. Auf Basis dieser Rangfolge wählten sie sieben Aktuatorpositionen an Drehgestellen und Hängerträgern aus. Anschließend führten sie Simulationen durch, bei denen jeder Aktuator nacheinander erregt wurde, und verwendeten einfache Anpassungen, um zu lernen, wie jede Kraft die Beschleunigungen des Wagens verändert. So entstand eine Abbildung, die Aktuatorkräfte mit Wagenbewegungen verknüpft und die Grundlage für eine physikalisch realistische Verteilung der Regelungsanstrengung bildet.
Ein zweischichtiger Regelungsansatz für eine ruhigere Fahrt
Kern der Arbeit ist ein zweischichtiges Regelungsframework. In der inneren Schicht überwachen einfache Rückführungsregler die seitlichen und vertikalen Beschleunigungen des Wagens und erzeugen „virtuelle“ Regelforderungen, die darauf abzielen, diese Werte gegen Null zu drücken. Es kommen zwei Varianten zum Einsatz: ein traditioneller Regler, dessen Verstärkungen mittels genetischer Suche abgestimmt wurden, und eine fuzzy-basierte Selbstabstimmungsvariante, die ihre Verstärkungen sanft in Echtzeit an das Level und die Geschwindigkeit der Bewegungen anpasst. In der äußeren Schicht übersetzt ein quadratischer Optimierungsalgorithmus diese virtuellen Forderungen in einzelne Aktuatorkräfte, wobei er strikt die Grenzen respektiert, wie stark jeder Aktuator drücken oder ziehen darf.
Was die Simulationen über den Fahrkomfort aussagen
Die Forscher verglichen drei innere Regler, die alle dieselbe äußere Zuteilungsschicht nutzen: einen klassischen optimalen Regler, die festverstärkte Rückkopplung und die fuzzy-basierte selbstabstimmbare Rückkopplung. Unter denselben starken Seitenwinden und Gleisunregelmäßigkeiten reduzierten alle drei die Schwingungen im Vergleich zum ungeregelten System. Insgesamt lieferte die fuzzy-selbstabstimmende Variante die beste Leistung und verringerte die mittleren seitlichen und vertikalen Beschleunigungen um etwa ein Fünftel und senkte plötzliche Spitzen um ungefähr ein Drittel. Standardisierte Fahrqualitätsindizes verbesserten sich ebenfalls, und die Bewegungsaufzeichnungen wurden im Zeitverlauf glatter und weniger abgehackt.
Was das für die zukünftige Einschienenbahn-Reise bedeutet
Für eine Fahrgastperspektive übersetzt sich das Hauptergebnis der Studie in eine ruhigere, stabilere Fahrt, selbst wenn der Wind weht und das Gleis nicht perfekt ist. Durch die Kombination einfacher Beschleunigungsmessungen mit einer intelligenten Verteilung der Arbeit auf mehrere Aktuatoren hält das vorgeschlagene Framework die Fahrzeugbewegungen im Zaum und bleibt zugleich innerhalb realistischer Hardwaregrenzen. Die Autoren weisen darauf hin, dass weitere Arbeiten nötig sind, um Aktuatoranordnungen zu verfeinern, komplexere Hardwareeffekte zu behandeln und Tests an realen Zügen durchzuführen, aber ihre Ergebnisse deuten darauf hin, dass sorgfältig gestaltete aktive Regelung hängende Einschienenbahnen komfortabler und attraktiver für den städtischen Alltagsverkehr machen könnte.
Zitation: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Schlüsselwörter: hängende Einschienenbahn, Fahrkomfort, Schwingungsregelung, PID-Regelung, quadratische Programmierung