Clear Sky Science · pt
Controle de estabilidade de veículos monotrilho suspensos baseado em PID e alocação por programação quadrática
Por que uma viagem de monotrilho mais suave importa
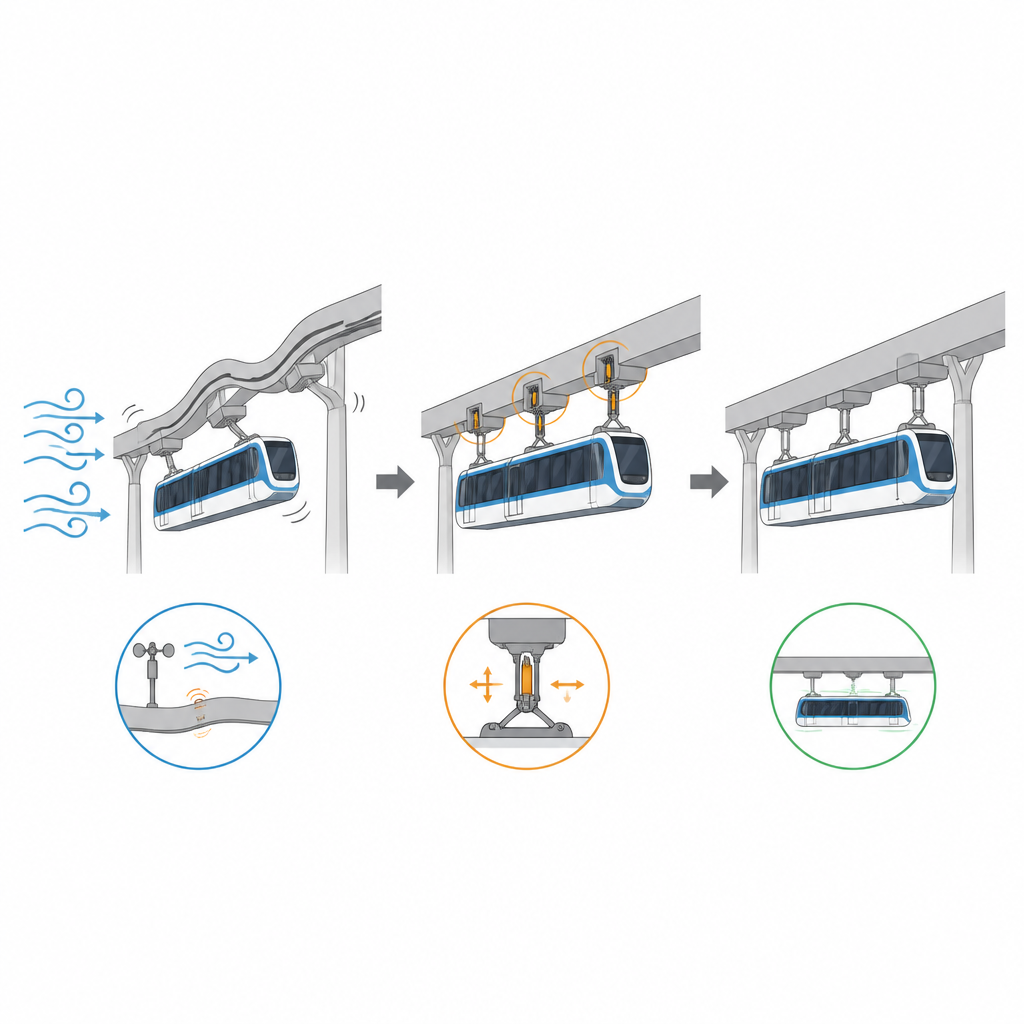
Monotrilhos suspensos estão surgindo em mais cidades e áreas cênicas porque são silenciosos, compactos e relativamente baratos de construir. Ainda assim, os passageiros podem sentir balanços e solavancos notáveis quando rajadas de vento e pequenas irregularidades na via atuam em conjunto. Este estudo explora como domar esse movimento usando um sistema de controle inteligente que ajusta discretamente atuadores ocultos sob o carro para que a viagem pareça mais estável e segura.
Como trens suspensos são sacudidos pelo vento e pelo trilho
Diferentemente dos trens convencionais que correm sobre trilhos, os vagões de monotrilho suspenso ficam pendurados em uma viga, o que os torna mais sensíveis a ventos laterais e desníveis no guia. Ventos cruzados empurram o carro lateralmente enquanto pequenas variações de altura e desalinhamentos na viga fazem as rodas chacoalharem. Esses efeitos ocorrem simultaneamente e nas direções lateral e vertical, levando a movimentos acoplados que podem afetar o conforto e até a segurança. Pesquisas anteriores enfocaram principalmente a dinâmica do sistema, a sintonia de molas e amortecedores passivos ou o uso de dispositivos semiativos, mas deram menos atenção ao controle ativo que lide com os movimentos laterais e verticais juntos, considerando limites realistas do hardware.
Construindo um gêmeo digital realista do trem
Para projetar um controlador que funcione na prática, os autores primeiro criaram um modelo computacional detalhado de um veículo de monotrilho suspenso, incluindo carroceria, bogies, rodas e componentes da suspensão. Em seguida, refinaram esse modelo usando medidas do mundo real de um trem em operação. Ajustando parâmetros-chave até que as pontuações simuladas de qualidade de viagem corresponderam às medidas, obtiveram um "gêmeo digital" orientado por dados que se comporta de forma muito semelhante ao veículo real sob condições reais de trilho e vento. Eles também modelaram estatisticamente ventos naturais e imperfeições na via para que o trem digital experimente rajadas e solavancos realistas durante os testes.
Deixando o veículo decidir onde os atuadores importam mais
Em vez de adivinhar onde colocar atuadores, a equipe usou um estudo de sensibilidade para ver quais locais e direções afetam mais fortemente o quanto o carro balança lateralmente e verticalmente. Com base nesse ranking, escolheram sete posições de atuadores nos bogies e nas vigas de suspensão. Em seguida, executaram simulações onde cada atuador era excitado individualmente e usaram um ajuste simples para aprender como cada força altera as acelerações do carro. Isso produziu um mapa que liga forças dos atuadores ao movimento do carro, formando a base para distribuir o esforço de controle de maneira fisicamente realista.
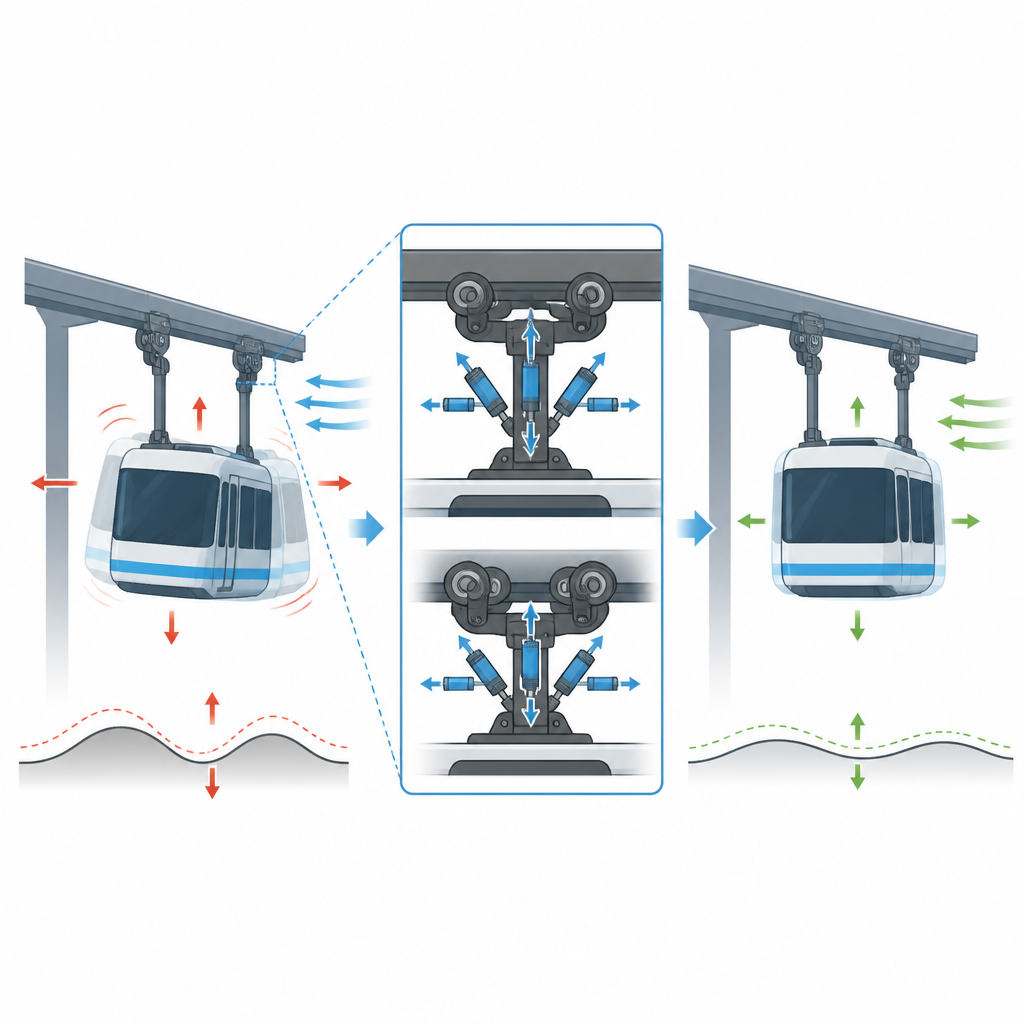
Uma abordagem de controle em duas camadas para uma viagem mais calma
O cerne do trabalho é uma estrutura de controle em duas camadas. Na camada interna, controladores de realimentação simples monitoram as acelerações laterais e verticais do carro e geram demandas de controle "virtuais" destinadas a empurrar esses valores em direção a zero. São usadas duas variantes: um controlador tradicional cujos ganhos são ajustados por uma busca genética, e uma versão fuzzy autotunável que retoma suavemente seus próprios ganhos em tempo real conforme o nível e a velocidade do movimento mudam. Na camada externa, um algoritmo de otimização quadrática traduz essas demandas virtuais em forças individuais dos atuadores, respeitando estritamente limites sobre o quanto cada atuador pode empurrar ou puxar.
O que as simulações dizem sobre o conforto da viagem
Os pesquisadores compararam três controladores internos, todos usando a mesma camada externa de alocação: um controlador ótimo clássico, o feedback de ganho fixo e o feedback fuzzy autotunável. Sob os mesmos ventos cruzados fortes e irregularidades da via, os três reduziram a vibração em comparação com deixar o sistema sem controle. A versão fuzzy autotunável teve o melhor desempenho no geral, reduzindo as acelerações laterais e verticais médias em cerca de um quinto e diminuindo picos súbitos em aproximadamente um terço. Índices padrão de qualidade de viagem também melhoraram, e as trajetórias de movimento tornaram-se mais suaves e menos entrecortadas ao longo do tempo.
O que isso significa para futuras viagens de monotrilho
Para um passageiro, o principal resultado do estudo se traduz em uma viagem mais silenciosa e estável mesmo quando o vento sopra e o trilho está longe da perfeição. Ao combinar medições de aceleração diretas com uma forma inteligente de compartilhar o trabalho entre vários atuadores, a estrutura proposta mantém o movimento do veículo sob controle enquanto permanece dentro de limites realistas de hardware. Os autores observam que mais trabalho é necessário para refinar layouts de atuadores, lidar com efeitos de hardware mais complexos e testar em trens reais, mas os resultados sugerem que um controle ativo cuidadosamente projetado pode tornar os monotrilhos suspensos mais confortáveis e atraentes para o transporte urbano cotidiano.
Citação: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Palavras-chave: monotrilho suspenso, conforto da viagem, controle de vibração, controle PID, programação quadrática