Clear Sky Science · en
Stability control of suspended monorail vehicles based on PID and quadratic programming allocation
Why a smoother monorail ride matters
Hanging monorails are appearing in more cities and scenic areas because they are quiet, compact, and relatively cheap to build. Yet passengers can feel noticeable swaying and bouncing when wind gusts and small bumps in the track act together. This study explores how to tame that motion using a smart control system that quietly adjusts hidden actuators under the car so that the ride feels steadier and safer.
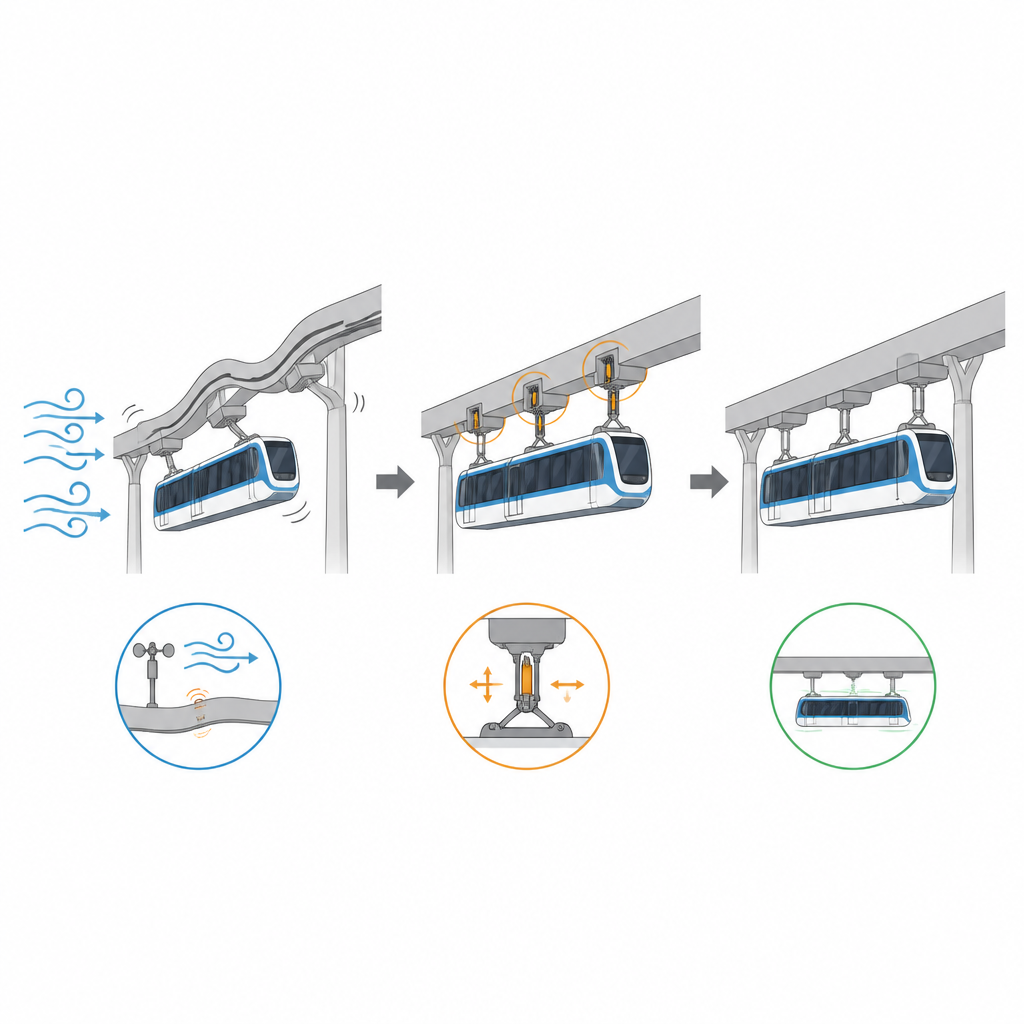
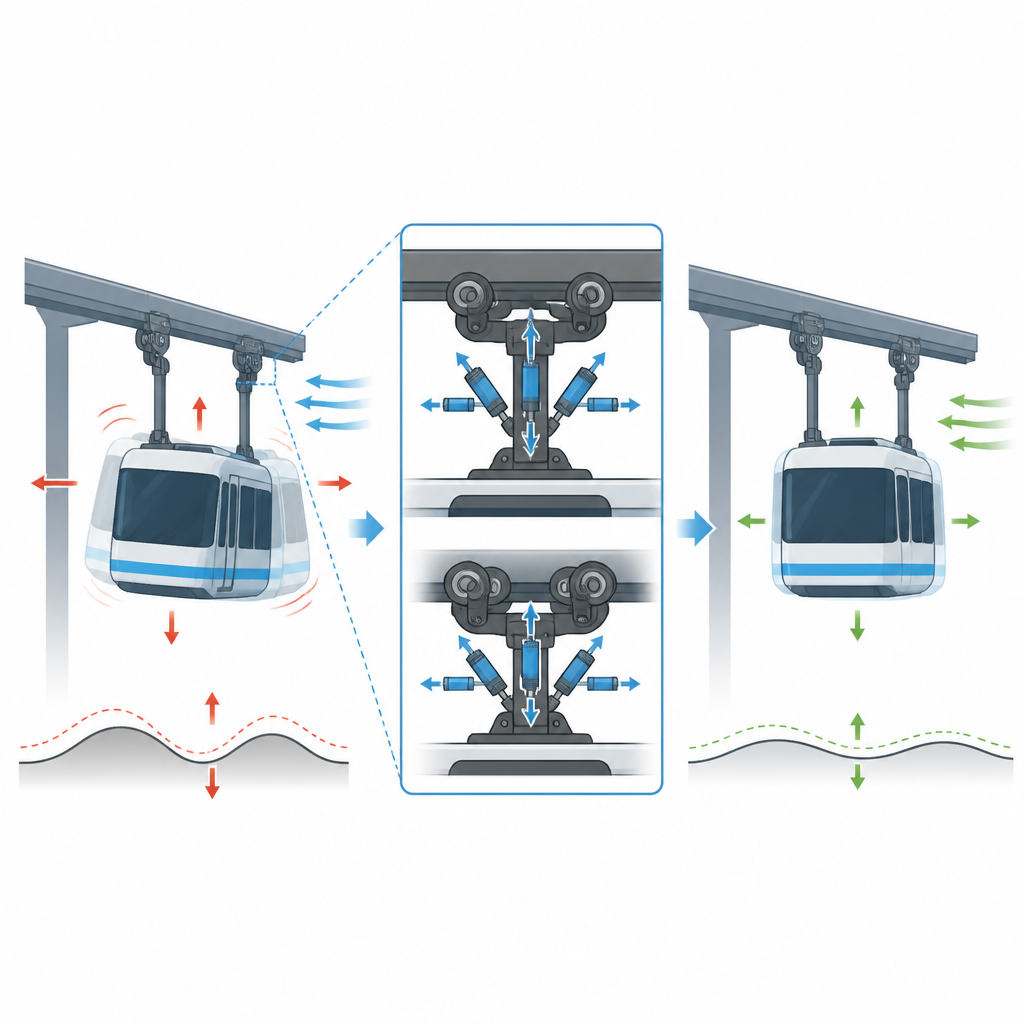
How suspended trains are shaken by wind and track
Unlike conventional trains that sit on top of rails, suspended monorail cars hang from a beam, which makes them more sensitive to side winds and uneven guideways. Crosswinds push the car from the side while tiny height changes and misalignments in the beam jostle the wheels. These effects happen at the same time and in both sideways and vertical directions, leading to coupled motions that can affect comfort and even safety. Earlier research mainly looked at how the system moves, how to tune passive springs and dampers, or how to use semi-active devices, but paid less attention to active control that handles sideways and vertical motions together under realistic limits on the hardware.
Building a realistic digital twin of the train
To design a controller that will work in practice, the authors first created a detailed computer model of a suspended monorail vehicle, including carbody, bogies, wheels, and suspension parts. They then refined this model using real-world measurements from an operating train. By adjusting key parameters until the simulated ride-quality scores matched the measured ones, they obtained a data-driven "digital twin" that behaves much like the actual vehicle under real track and wind conditions. They also modeled natural winds and track imperfections statistically so that the digital train experiences realistic gusts and bumps during testing.
Letting the vehicle decide where actuators matter most
Rather than guessing where to place actuators, the team used a sensitivity study to see which locations and directions most strongly affect how much the car shakes sideways and up and down. Based on this ranking, they chose seven actuator positions on the bogies and hanger beams. They then ran simulations where each actuator was excited one at a time and used simple fitting to learn how each force changes the car’s accelerations. This produced a map that links actuator forces to the car’s motion, forming the foundation for distributing control effort in a physically realistic way.
A two-layer control approach for a calmer ride
The heart of the work is a two-layer control framework. In the inner layer, simple feedback controllers watch the car’s sideways and vertical accelerations and generate “virtual” control demands intended to push those values toward zero. Two flavors are used: a traditional controller whose gains are tuned by a genetic search, and a fuzzy self-tuning version that gently retunes its own gains on the fly as the level and speed of motion change. In the outer layer, a quadratic optimization algorithm translates these virtual demands into individual actuator forces, while strictly respecting limits on how hard each actuator is allowed to push or pull.
What the simulations say about ride comfort
The researchers compared three inner controllers, all using the same outer allocation layer: a classical optimal controller, the fixed-gain feedback, and the fuzzy self-tuning feedback. Under the same strong crosswinds and track irregularities, all three reduced vibration compared with leaving the system uncontrolled. The fuzzy self-tuning version performed best overall, cutting the average sideways and vertical accelerations by about one-fifth and lowering sudden peaks by roughly one-third. Standard ride-quality indices also improved, and the motion traces became smoother and less choppy over time.
What this means for future monorail travel
To a passenger, the study’s main result translates into a quieter, more stable ride even when the wind blows and the track is less than perfect. By combining straightforward acceleration measurements with a smart way of sharing work among several actuators, the proposed framework keeps vehicle motion in check while staying within realistic hardware limits. The authors note that further work is needed to refine actuator layouts, handle more complex hardware effects, and test on real trains, but their results suggest that carefully designed active control could make suspended monorails more comfortable and attractive for everyday urban transport.
Citation: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Keywords: suspended monorail, ride comfort, vibration control, PID control, quadratic programming