Clear Sky Science · pl
Sterowanie stabilnością zawieszonych pojazdów monorail oparte na PID i alokacji przez programowanie kwadratowe
Dlaczego gładsza jazda monorailem ma znaczenie
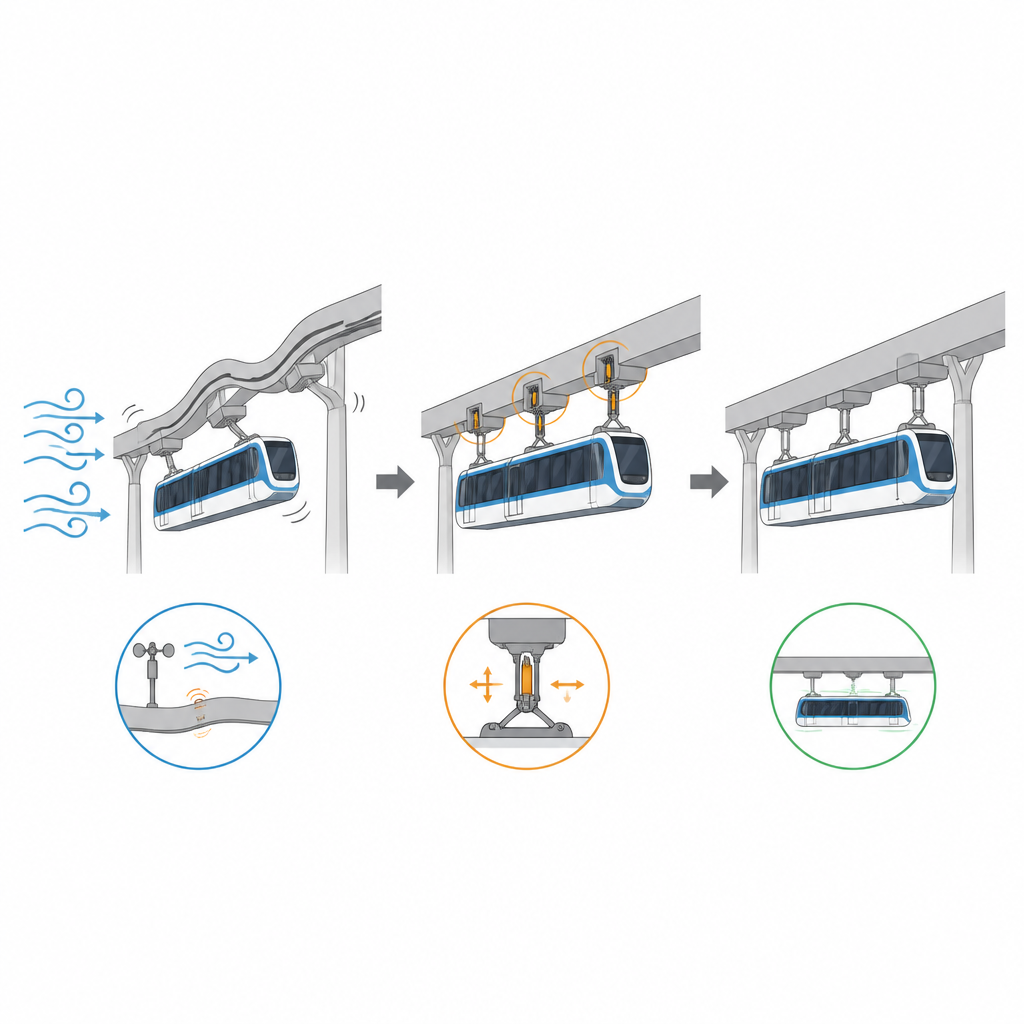
Zawieszone monoraile pojawiają się w coraz większej liczbie miast i obszarów turystycznych, ponieważ są ciche, kompaktowe i stosunkowo tanie w budowie. Jednak pasażerowie mogą odczuwać zauważalne kołysanie i odbicia, gdy porywy wiatru i drobne nierówności toru działają jednocześnie. W pracy tej badacze analizują, jak poskromić te ruchy za pomocą inteligentnego systemu sterowania, który dyskretnie reguluje ukryte siłowniki pod wagonem, tak by przejazd wydawał się bardziej stabilny i bezpieczny.
Jak wiatr i tor wprawiają w drgania zawieszone pociągi
W przeciwieństwie do konwencjonalnych pociągów, które poruszają się po szynach, wagony monorail wiszą na belce, co czyni je bardziej wrażliwymi na boczne wiatry i nierówności prowadnic. Wiatr poprzeczny popycha wagon od boku, podczas gdy drobne zmiany wysokości i niewspółosiowości belki szarpią koła. Efekty te występują jednocześnie w kierunku bocznym i pionowym, prowadząc do sprzężonych ruchów, które mogą wpływać na komfort, a nawet bezpieczeństwo. Wcześniejsze badania koncentrowały się głównie na dynamice układu, dostrajaniu pasywnych sprężyn i tłumików lub stosowaniu urządzeń półaktywnych, przy czym mniej uwagi poświęcono aktywnej kontroli, która jednocześnie radzi sobie z ruchem bocznym i pionowym w realistycznych ograniczeniach sprzętowych.
Budowanie realistycznego cyfrowego bliźniaka pociągu
Aby zaprojektować regulator działający w praktyce, autorzy najpierw stworzyli szczegółowy model komputerowy zawieszonego pojazdu monorail, obejmujący nadwozie, wózki, koła i elementy zawieszenia. Następnie udoskonalili ten model za pomocą pomiarów z rzeczywistego, eksploatowanego pociągu. Poprzez dopasowanie kluczowych parametrów do momentu, gdy symulowane wskaźniki jakości jazdy odpowiadały pomiarom, uzyskali oparty na danych „cyfrowy bliźniak”, który zachowuje się podobnie jak rzeczywisty pojazd w warunkach rzeczywistych toru i wiatru. Zmodelowali także naturalne wiatry i niedoskonałości toru w sposób statystyczny, by cyfrowy pociąg doświadczał realistycznych porywów i nierówności podczas testów.
Pozwolenie pojazdowi zdecydować, gdzie siłowniki mają największe znaczenie
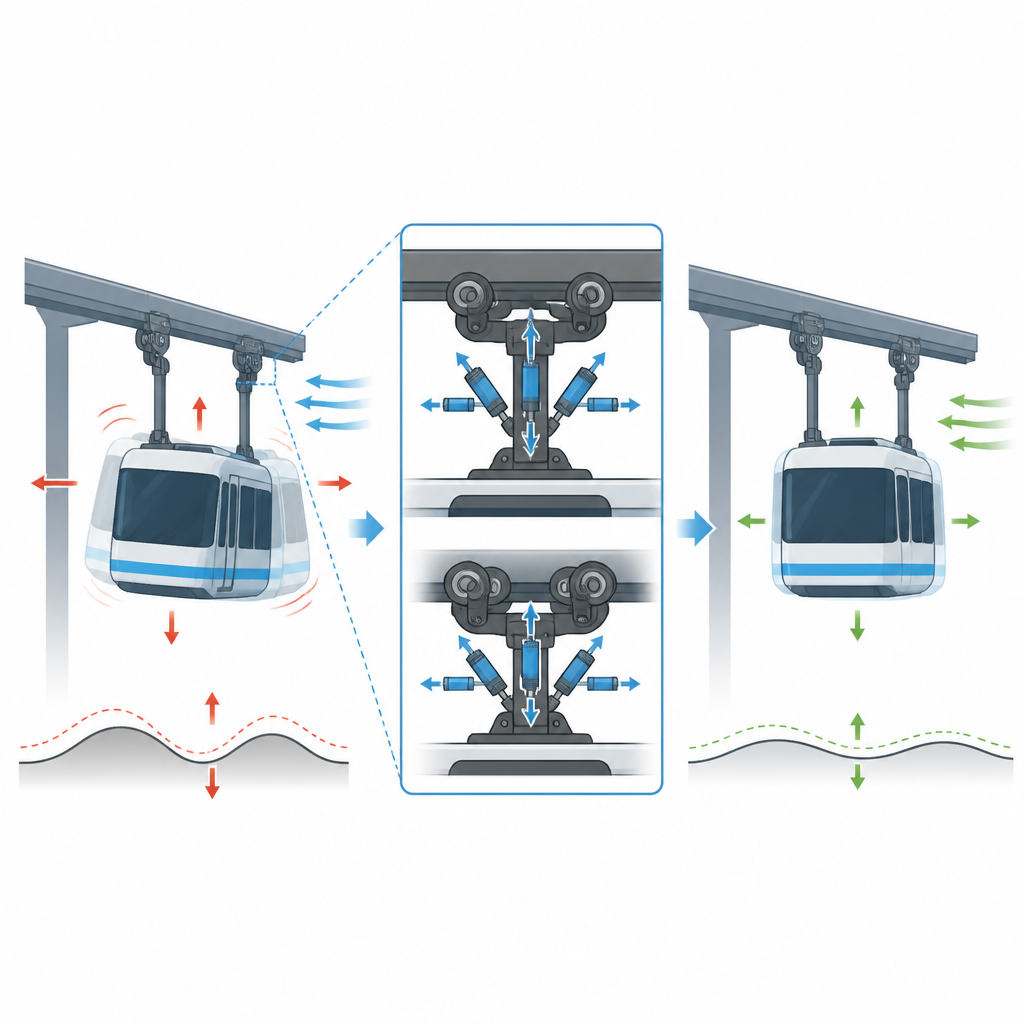
Zamiast zgadywać rozmieszczenie siłowników, zespół zastosował badanie czułości, aby sprawdzić, które lokalizacje i kierunki najsilniej wpływają na boczne i pionowe drgania wagonu. Na podstawie tego rankingu wybrano siedem pozycji siłowników na wózkach i belkach zawieszenia. Przeprowadzono symulacje, w których każdy siłownik pobudzano pojedynczo, a następnie zastosowano proste dopasowanie, by poznać, jak każda siła zmienia przyspieszenia wagonu. Powstała w ten sposób mapa wiążąca siły siłowników z ruchem wagonu, stanowiąca podstawę do rozdzielania wysiłku sterującego w sposób zgodny z fizyką.
Dwuwarstwowe podejście sterujące dla spokojniejszej jazdy
Rdzeń pracy stanowi dwuwarstwowa struktura sterowania. W warstwie wewnętrznej proste regulatory sprzężenia zwrotnego obserwują boczne i pionowe przyspieszenia wagonu i generują „wirtualne” żądania sterujące mające na celu sprowadzenie tych wartości do zera. Wykorzystano dwa warianty: tradycyjny regulator, którego wzmocnienia dostrojono przy użyciu przeszukiwania genetycznego, oraz rozmytą wersję samodostrajającą się, która łagodnie przestroi własne wzmocnienia w locie w miarę zmiany poziomu i szybkości ruchu. W warstwie zewnętrznej algorytm optymalizacji kwadratowej tłumaczy te wirtualne żądania na siły poszczególnych siłowników, jednocześnie ściśle respektując ograniczenia co do maksymalnej siły pchającej lub ciągnącej każdego siłownika.
Co symulacje mówią o komforcie jazdy
Badacze porównali trzy regulatory wewnętrzne, wszystkie korzystające z tej samej zewnętrznej warstwy alokacji: klasyczny regulator optymalny, sprzężenie zwrotne o stałych wzmocnieniach oraz rozmyte sprzężenie zwrotne z samodostrajaniem. Pod tymi samymi silnymi wiatrami poprzecznymi i nierównościami toru wszystkie trzy obniżyły drgania w porównaniu z brakiem sterowania. Wersja rozmyta samodostrajająca się wypadła najlepiej ogólnie, zmniejszając średnie przyspieszenia boczne i pionowe o około jedną piątą oraz redukując nagłe szczyty mniej więcej o jedną trzecią. Poprawiły się także standardowe wskaźniki jakości jazdy, a przebiegi ruchu stały się gładsze i mniej skokowe w czasie.
Co to oznacza dla przyszłych podróży monorailem
Dla pasażera główny wynik badania przekłada się na cichszą, bardziej stabilną jazdę nawet przy silnym wietrze i nieidealnym torze. Poprzez połączenie prostych pomiarów przyspieszeń z inteligentnym sposobem dzielenia pracy między kilkoma siłownikami proponowane rozwiązanie utrzymuje ruch pojazdu w ryzach, pozostając w granicach realistycznych ograniczeń sprzętowych. Autorzy zauważają, że potrzebne są dalsze prace nad udoskonaleniem układów siłowników, obsługą bardziej złożonych efektów sprzętowych oraz testami na rzeczywistych pociągach, lecz ich wyniki sugerują, że starannie zaprojektowana aktywna kontrola może uczynić zawieszone monoraile bardziej komfortowymi i atrakcyjnymi dla codziennego transportu miejskiego.
Cytowanie: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Słowa kluczowe: zawieszony monorail, komfort jazdy, kontrola drgań, sterowanie PID, programowanie kwadratowe