Clear Sky Science · ja
PIDと二次計画割当てに基づく懸垂式モノレール車両の安定性制御
なぜ滑らかなモノレールの乗り心地が重要か
懸垂式モノレールは静かで占有面積が小さく、比較的低コストで建設できるため、都市や観光地で導入が増えています。それでも、突風や軌道の小さな凹凸が重なると、乗客は明らかな横揺れや上下のバウンドを感じることがあります。本研究は、車両下部の目に見えないアクチュエータを静かに調整して乗り心地をより安定で安全に感じられるようにするスマートな制御システムで、その動きを抑える方法を探ります。
懸垂式列車が風や軌道でどのように揺れるか
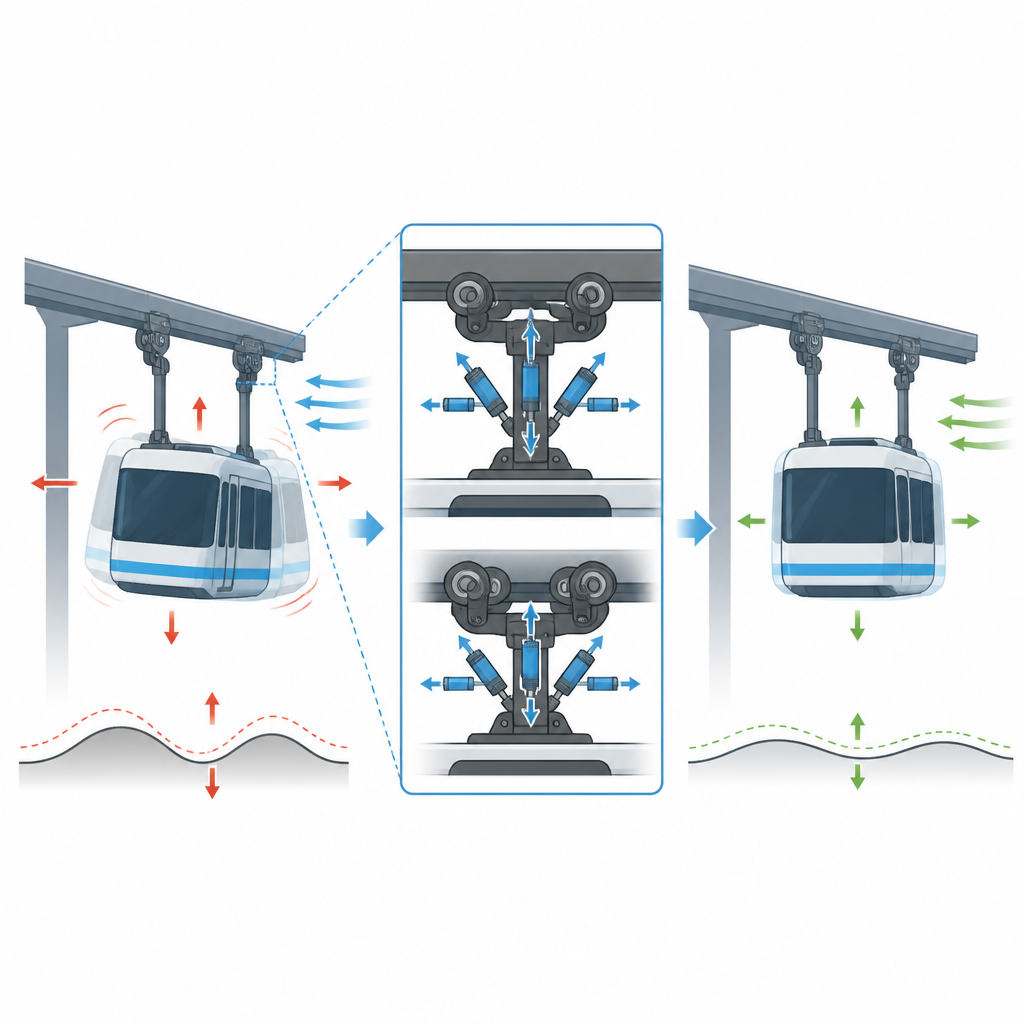
レール上に乗る従来の列車とは異なり、懸垂式モノレール車両は梁からぶら下がっているため、横風や不均一な誘導路に対してより敏感になります。横風は車体を側方に押し、梁の高さ変動やずれは車輪を突き上げます。これらの影響は同時に、かつ横方向と垂直方向の両方で発生し、乗り心地や安全性に影響を与える連成運動を生みます。既往研究は主に系の運動特性、受動ばね・ダンパの調整、半能動デバイスの利用に焦点を当ててきましたが、実機の制限下で横方向と上下方向を同時に扱う能動制御にはあまり注意が払われていませんでした。
実機に即したデジタルツインの構築
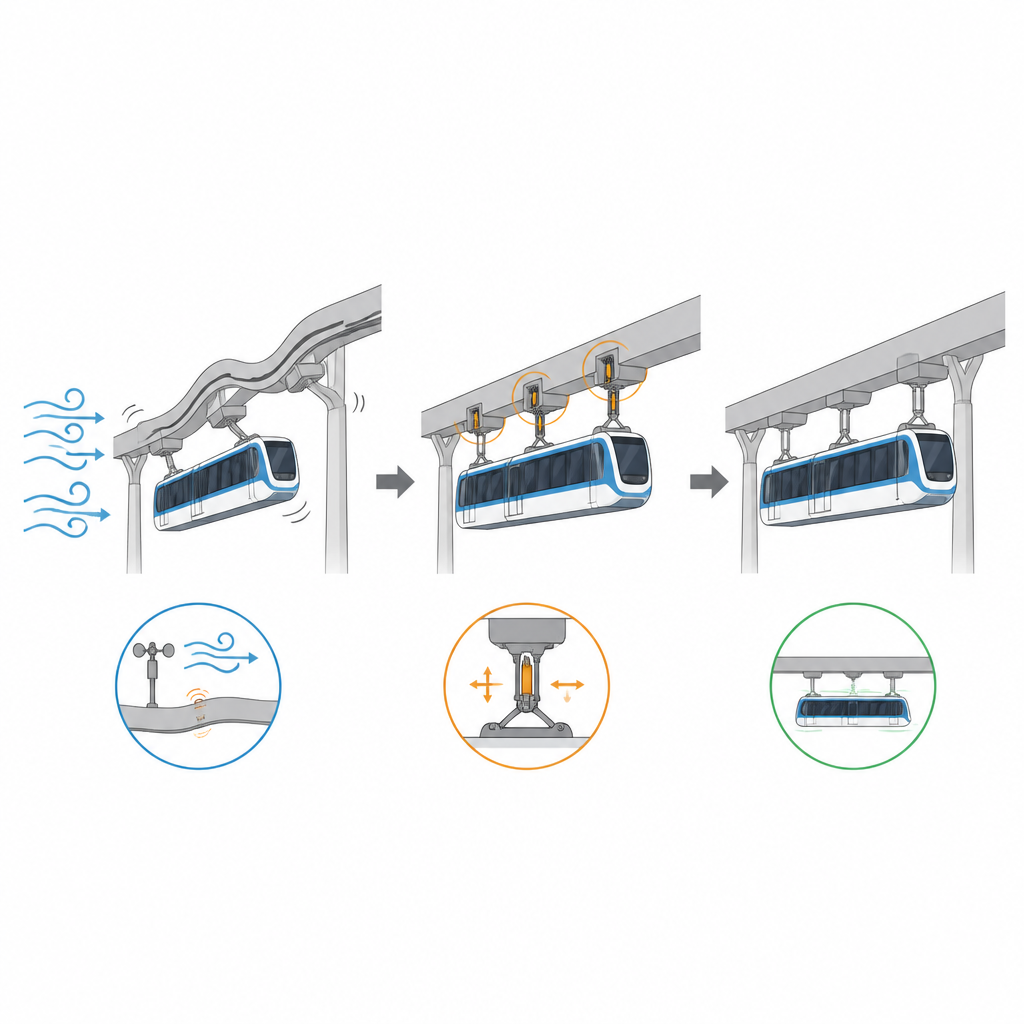
実用的に機能するコントローラを設計するために、著者らはまず車体、台車、車輪、サスペンション部品を含む懸垂式モノレール車両の詳細な計算機モデルを作成しました。次に、稼働中の列車から得た実測データを用いてモデルを精緻化しました。主要パラメータを調整し、シミュレーションの乗り心地指標が実測値と一致するまで繰り返すことで、実際の軌道や風条件下での車両の挙動に近いデータ駆動の「デジタルツイン」を得ました。自然風や軌道の不完全さも統計的にモデル化し、デジタル車両が試験中に現実的な突風や凹凸を経験するようにしています。
どこにアクチュエータが効くかを車両自身に決めさせる
アクチュエータの配置を推測する代わりに、チームは感度解析を用いて、車両の横揺れや上下振動に最も影響する位置と方向を明らかにしました。このランキングに基づき、台車とハンガービーム上の7か所のアクチュエータ位置を選定しました。その後、各アクチュエータを一つずつ励振するシミュレーションを行い、単純なフィッティングで各力が車体の加速度をどのように変えるかを学習しました。これによりアクチュエータ力と車両運動を結びつけるマップが得られ、物理的に現実的な形で制御努力を配分する基盤ができました。
より穏やかな乗り心地のための二層制御アプローチ
本研究の中核は二層の制御フレームワークです。内側層では、単純なフィードバックコントローラが車両の横方向および垂直方向の加速度を監視し、これらをゼロに近づけることを目的とした“仮想”の制御要求を生成します。内側層には二種類があり、遺伝的探索で利得を調整した伝統的なコントローラと、運動の大きさや速度の変化に応じて自身の利得を穏やかに再調整するファジー自己調整型があります。外側層では、二次最適化アルゴリズムがこれらの仮想要求を個々のアクチュエータ力に変換し、各アクチュエータの押引き能力の制約を厳守します。
シミュレーションが示す乗り心地の改善
研究者らは同じ外側割当て層を用いて、3種類の内側コントローラ(古典的な最適コントローラ、固定利得フィードバック、ファジー自己調整フィードバック)を比較しました。同一の強い横風と軌道不整下で、いずれの方式も無制御より振動を低減しました。全体として最も良好だったのはファジー自己調整型で、平均の横加速度と垂直加速度を約5分の1減らし、突発的なピークは約3分の1低下しました。標準的な乗り心地指標も改善し、時間軸上の動きの痙攣的な部分が滑らかになりました。
将来のモノレール旅行にとっての意義
乗客にとって、本研究の主な成果は風が強く軌道が完全でない場合でも、より静かで安定した乗り心地が得られる点です。簡便な加速度測定と複数のアクチュエータ間で作業を賢く分担する方法を組み合わせることで、提案フレームワークは実際的なハードウェア制約内で車両の動きを抑制します。著者らはさらにアクチュエータ配置の最適化、より複雑なハードウェア挙動への対応、実機での検証が必要だと指摘していますが、慎重に設計された能動制御が懸垂式モノレールを日常的な都市交通にとってより快適で魅力的にする可能性を示唆しています。
引用: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
キーワード: 懸垂式モノレール, 乗り心地, 振動制御, PID制御, 二次計画