Clear Sky Science · he
בקרת יציבות של רכבי מונורייל תלויים על בסיס PID והקצאת תכנות ריבועית
מדוע נסיעת מונורייל חלקה חשובה
מונוריילים תלוים מופיעים ביותר ערים ואזורים נופיים משום שהם שקטים, קומפקטיים והקמתם יחסית זולה. עם זאת, נוסעים עלולים לחוש התהוות והקפצות בולטות כאשר משבי רוח וזעזועים קטנים במסילה פועלים יחד. המחקר הזה בוחן איך לאלף תנועה זו באמצעות מערכת בקרה חכמה שמכווננת בשקט משעולים מוסתרים מתחת לקרון כך שהנסיעה תרגיש יציבה ובטוחה יותר.
איך רכבות תלויות מופרעות על ידי רוח ומסילה
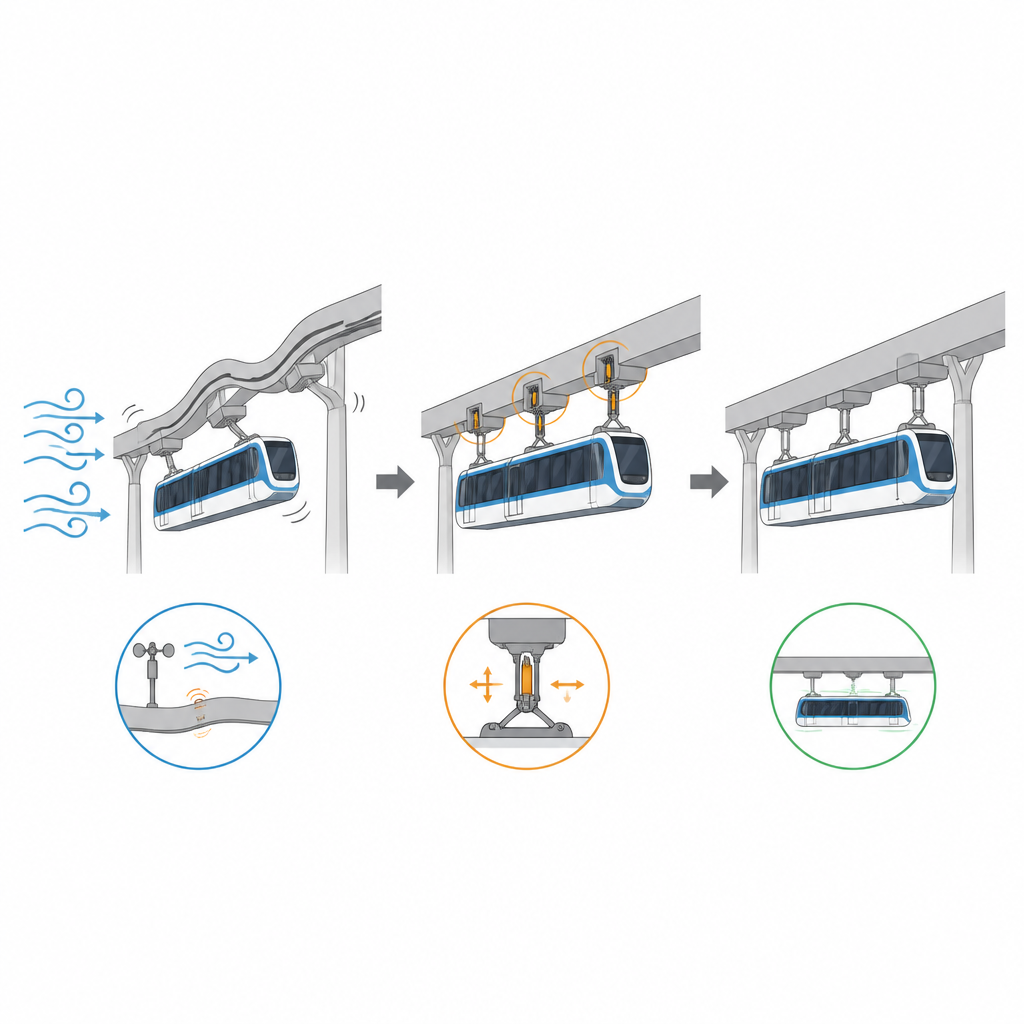
שונה מרכבות קונבנציונליות היושבות מעל פסי רכבת, קרונות מונורייל תלויים נתלים בקורה, מה שמגביר את הרגישות שלהם לרוחות רוחב ולאי־אחידות במדריכים. רוח רוחב דוחפת את הקרון מהצד בעוד שינויים זעירים בגובה וחוסר יישור בקורה מטלטלים את הגלגלים. השפעות אלה מתרחשות בו־זמנית במסלולים רוחביים ואנכיים, ויוצרות תנועות קשורות שיכולות להשפיע על הנוחות ואפילו על הבטיחות. מחקרים קודמים בדקו בעיקר את דינמיקת המערכת, איך לכוונן קפיצים ודמפרים פסיביים, או שימוש במכשירים חצי־אקטיביים, אך נתנו פחות תשומת לב לבקרה אקטיבית המטפלת בתנודות רוחביות ואנכיות יחד תחת מגבלות חומרה ריאליסטיות.
בניית תא דיגיטלי ריאליסטי של הרכב
כדי לעצב בורר שיפעל בפועל, המחברים יצרו תחילה מודל מחשב מפורט של רכב מונורייל תלוּי, כולל גוף הקרון, בוגיז, גלגלים ורכיבי המתלה. לאחר מכן הכוינו את המודל הזה בעזרת מדידות מהעולם האמיתי של רכבת פעילה. על ידי כוונון פרמטרים מרכזיים עד שהתוצאות המדומות תואמות את ציוני איכות הנסיעה הנמדדים, הם השיגו "תא דיגיטלי" מונחה־נתונים המתנהג בדומה לרכב האמיתי תחת תנאי מסילה ורוח מציאותיים. הם גם סימלצו רוחות טבעיות ופגמי מסילה סטטיסטית כדי שהרכבת הדיגיטלית תחווה משבים וזעזועים מציאותיים במהלך הבדיקות.
להשאיר לרכב להחליט היכן המשעולים חשובים ביותר
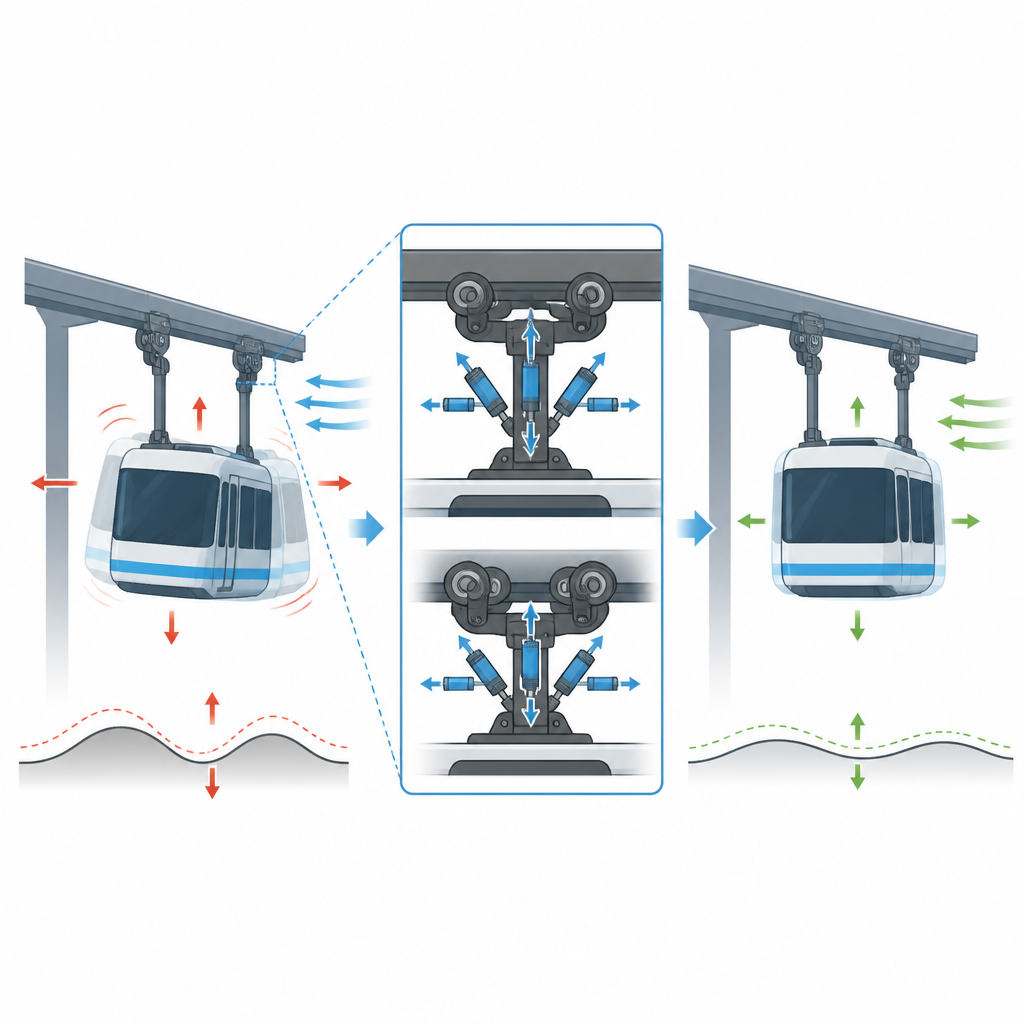
במקום לנחש היכן למקם משעולים, הצוות השתמש במחקר רגישות כדי לבדוק אילו מיקומים וכיוונים משפיעים בחוזקה על מידת הרעידות הרוחביות והאנכיות של הקרון. בהתבסס על דירוג זה בחרו בשבע עמדות משעול על הבוגיז וקורות התלייה. הם הריצו סימולציות בהן כל משעול הופרע בנפרד והשתמשו בהתאמה פשוטה כדי ללמוד כיצד כל כוח משנה את התאוצות של הקרון. זה ייצר מיפוי המקשר כוחות משעול לתנועת הקרון, ומוותיק את הבסיס לחלוקת מאמץ הבקרה באופן פיזיקלי ריאליסטי.
גישה דו-שכבתית לבקרת נסיעה שקטה יותר
הליבה של העבודה היא מסגרת בקרה דו־שכבתית. בשכבה הפנימית, בקרים משוב פשוטים עוקבים אחרי התאוצות הרוחביות והאנכיות של הקרון ומייצרים דרישות בקרה "וירטואליות" שמטרתן לדחוף ערכים אלה לאפס. נעשה שימוש בשתי גלגולים: בקר מסורתי שהרווחים שלו מגיעים מכיוונון באמצעות חיפוש גנטי, וגרסה פאזית המתאימה את הרווחים שלה בעדינות בזמן אמת ככל שרמת וקצב התנועה משתנים. בשכבה החיצונית, אלגוריתם אופטימיזציה ריבועית מתרגם את הדרישות הוירטואליות האלה לכוחות בודדים על המשעולים, תוך כיבוד קפדני של מגבלות על כמה חזק כל משעול יכול לדחוף או למשוך.
מה הסימולציות אומרות על נוחות הנסיעה
החוקרים השוו שלושה בקרים פנימיים, כולם משתמשים באותה שכבת הקצאה חיצונית: בורר אופטימלי קלאסי, משוב ברווח קבוע, והמשוב הפאזי המתאים את עצמו. תחת אותם משבי רוח חזקים ופגמי מסילה, השלושה הפחיתו רעידות בהשוואה להיעדר בקרה. הגרסה הפאזית המתאימה את עצמה נתנה את התוצאה הטובה ביותר באופן כללי, קיצצה את הממוצע של התאוצות הרוחביות והאנכיות בכ־מִחצית חמישית והורידה שיאים פתאומיים בכ־שליש. מדדי איכות נסיעה סטנדרטיים השתפרו גם הם, ועקבות התנועה הפכו חלקות ופחות מקוטעות לאורך הזמן.
מה המשמעות של זה עבור נסיעות מונורייל עתידיות
בעיני הנוסע, התוצאה העיקרית של המחקר מתורגמת לנסיעה שקטה ויציבה יותר גם כשהרוח נושבת והמסילה אינה מושלמת. על ידי שילוב מדידות תאוצה פשוטות עם שיטת חלוקת עומס חכמה בין מספר משעולים, המסגרת המוצעת שומרת על תנועת הרכב תחת שליטה תוך שמירה על מגבלות חומרה ריאליסטיות. המחברים מציינים כי יש צורך בעבודה נוספת לכוונן פריסות המשעולים, להתמודד עם השפעות חומרה מורכבות יותר ולבחון על רכבות אמיתיות, אך התוצאות שלהם מרמזות שבקרה אקטיבית מתוכננת בקפידה עשויה להפוך מונוריילים תלויים לנעימים ומושכים יותר לתחבורה עירונית שיגרתית.
ציטוט: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
מילות מפתח: מונורייל תלוי, נוחות נסיעה, בקרת רעידות, בקרת PID, תכנות ריבועי