Clear Sky Science · es
Control de estabilidad de vehículos de monorraíl suspendido basado en PID y asignación por programación cuadrática
Por qué importa un viaje de monorraíl más suave
Los monorraíles colgantes aparecen en más ciudades y zonas turísticas porque son silenciosos, compactos y relativamente baratos de construir. Sin embargo, los pasajeros pueden notar balanceos y rebotes cuando las rachas de viento y las pequeñas irregularidades de la vía actúan conjuntamente. Este estudio explora cómo domar ese movimiento mediante un sistema de control inteligente que ajusta discretamente actuadores ocultos bajo el coche para que el viaje se sienta más estable y seguro.
Cómo el viento y la vía sacuden los trenes suspendidos
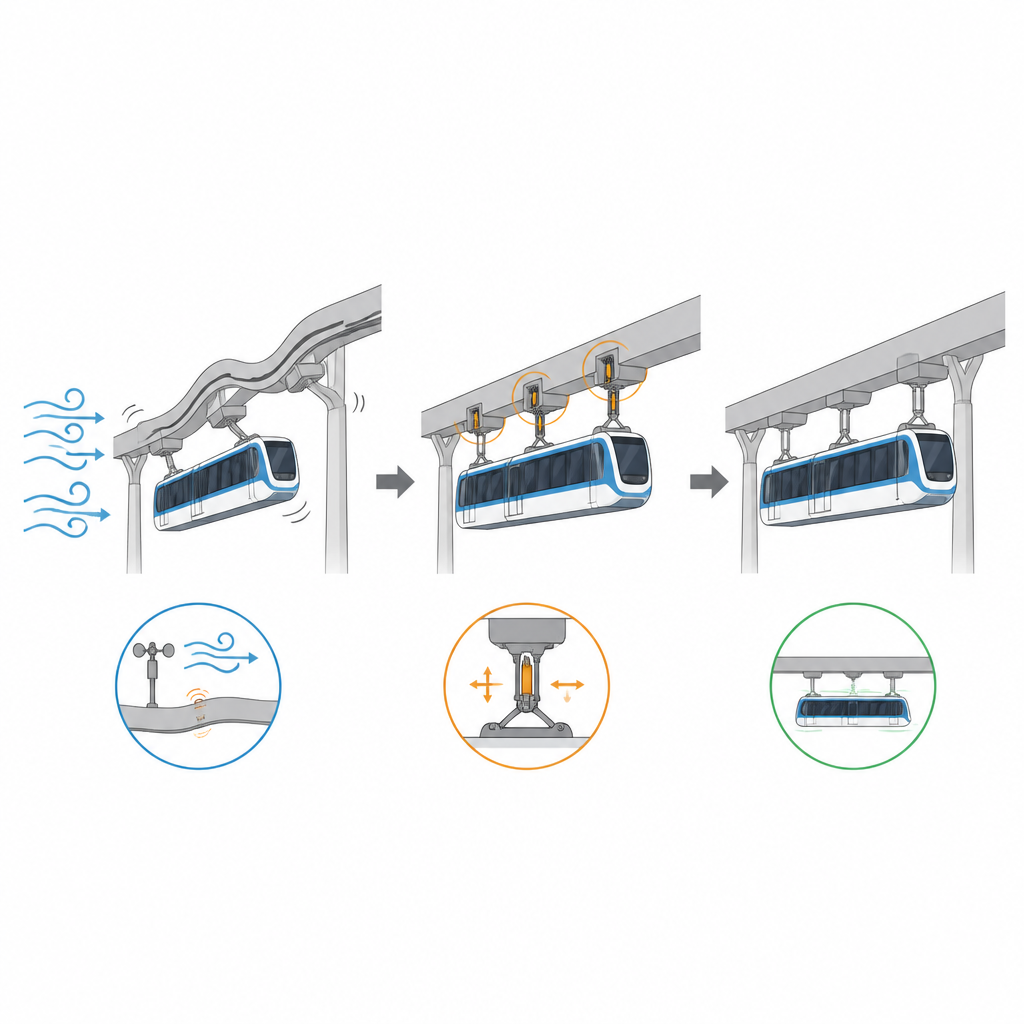
A diferencia de los trenes convencionales que se apoyan sobre raíles, los coches de monorraíl suspendido cuelgan de una viga, lo que los hace más sensibles a los vientos laterales y a guías desiguales. Las ráfagas cruzadas empujan el coche lateralmente mientras que pequeños cambios de altura y desalineaciones en la viga sacuden las ruedas. Estos efectos ocurren simultáneamente y en direcciones lateral y vertical, provocando movimientos acoplados que pueden afectar la comodidad e incluso la seguridad. Investigaciones anteriores se centraron principalmente en cómo se mueve el sistema, cómo ajustar muelles y amortiguadores pasivos, o cómo usar dispositivos semiactivos, pero prestaron menos atención al control activo que maneje conjuntamente los movimientos laterales y verticales bajo límites realistas del hardware.
Construyendo un gemelo digital realista del tren
Para diseñar un controlador que funcione en la práctica, los autores primero crearon un modelo informático detallado de un vehículo de monorraíl suspendido, incluyendo la carrocería, los bogies, las ruedas y los elementos de suspensión. Luego refinaron este modelo usando medidas del mundo real de un tren en operación. Ajustando parámetros clave hasta que los índices de calidad de marcha simulados coincidieran con los medidos, obtuvieron un "gemelo digital" basado en datos que se comporta de forma similar al vehículo real bajo condiciones reales de vía y viento. También modelaron estadísticamente los vientos naturales y las imperfecciones de la vía para que el tren digital experimente ráfagas y baches realistas durante las pruebas.
Dejando que el vehículo decida dónde importan más los actuadores
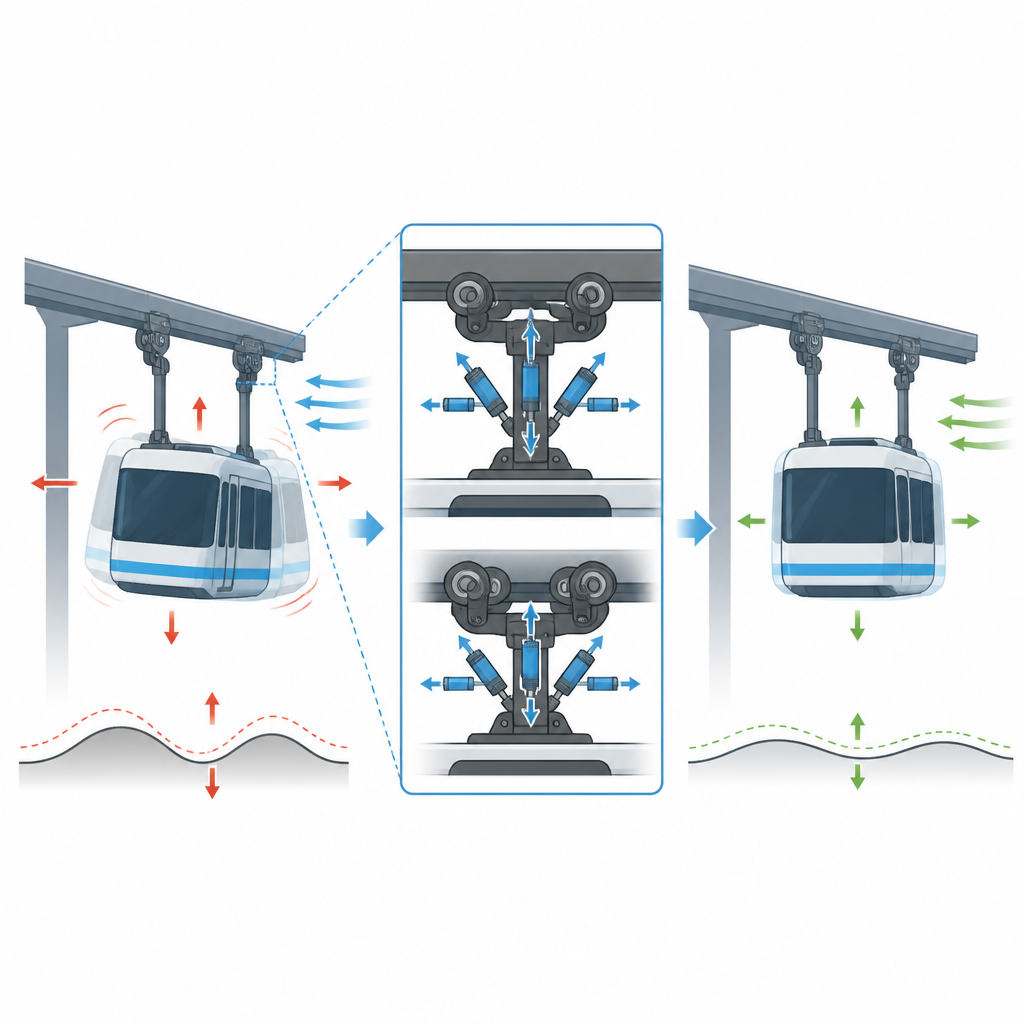
En lugar de adivinar dónde colocar los actuadores, el equipo realizó un estudio de sensibilidad para ver qué ubicaciones y direcciones afectan más fuertemente cuánto se sacude el coche lateral y verticalmente. Basándose en este ranking, eligieron siete posiciones de actuadores en los bogies y las vigas de suspensión. A continuación hicieron simulaciones donde cada actuador se excitó uno por uno y usaron un ajuste simple para aprender cómo cada fuerza cambia las aceleraciones del coche. Esto produjo un mapa que vincula las fuerzas de los actuadores con el movimiento del coche, formando la base para distribuir el esfuerzo de control de una manera físicamente realista.
Un enfoque de control de dos capas para un viaje más tranquilo
El núcleo del trabajo es un marco de control de dos capas. En la capa interna, controladores de retroalimentación simples vigilan las aceleraciones laterales y verticales del coche y generan demandas de control "virtuales" destinadas a llevar esos valores hacia cero. Se usan dos variantes: un controlador tradicional cuyos ganadores se ajustan mediante una búsqueda genética, y una versión difusa de autoajuste que retoca suavemente sus propias ganancias en tiempo real conforme cambian el nivel y la velocidad del movimiento. En la capa externa, un algoritmo de optimización cuadrática traduce estas demandas virtuales en fuerzas individuales de los actuadores, respetando estrictamente los límites de cuánto puede empujar o tirar cada actuador.
Lo que dicen las simulaciones sobre la comodidad de la marcha
Los investigadores compararon tres controladores internos, todos usando la misma capa externa de asignación: un controlador óptimo clásico, la retroalimentación de ganancia fija y la retroalimentación difusa de autoajuste. Bajo las mismas fuertes rachas transversales y las irregularidades de la vía, los tres redujeron la vibración en comparación con dejar el sistema sin controlar. La versión difusa de autoajuste fue la más eficaz en conjunto, reduciendo las aceleraciones medias laterales y verticales en alrededor de una quinta parte y disminuyendo los picos súbitos en aproximadamente un tercio. Los índices estándar de calidad de marcha también mejoraron y las trazas de movimiento se volvieron más suaves y menos entrecortadas con el tiempo.
Qué significa esto para el futuro del viaje en monorraíl
Para un pasajero, el resultado principal del estudio se traduce en un viaje más silencioso y estable incluso cuando sopla el viento y la vía no es perfecta. Al combinar mediciones de aceleración sencillas con una forma inteligente de repartir trabajo entre varios actuadores, el marco propuesto mantiene el movimiento del vehículo bajo control mientras se mantiene dentro de límites de hardware realistas. Los autores señalan que se necesita trabajo adicional para refinar las disposiciones de los actuadores, manejar efectos de hardware más complejos y probar en trenes reales, pero sus resultados sugieren que un control activo diseñado con cuidado podría hacer los monorraíles suspendidos más cómodos y atractivos para el transporte urbano diario.
Cita: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Palabras clave: monorraíl suspendido, comodidad de viaje, control de vibraciones, control PID, programación cuadrática