Clear Sky Science · tr
PID ve kuadratik programlama dağılımına dayalı asılı monoray araçlarının stabilite kontrolü
Neden daha pürüzsüz bir monoray yolculuğu önemli
Asılı monoraylar sessiz, kompakt ve nispeten düşük maliyetli oldukları için giderek daha fazla şehirde ve turistik bölgede görülüyor. Yine de rüzgarın ani esintileri ve raydaki küçük tümsekler birlikte etki ettiğinde yolcular belirgin sallanma ve zıplama hissedebilir. Bu çalışma, vagon altındaki gizli aktüatörleri sessizce ayarlayan akıllı bir kontrol sistemiyle o hareketleri nasıl yatıştırabileceğimizi araştırıyor; amaç yolculuğun daha dengeli ve daha güvenli hissettirilmesi.
Asılı trenler rüzgar ve ray tarafından nasıl sarsılır
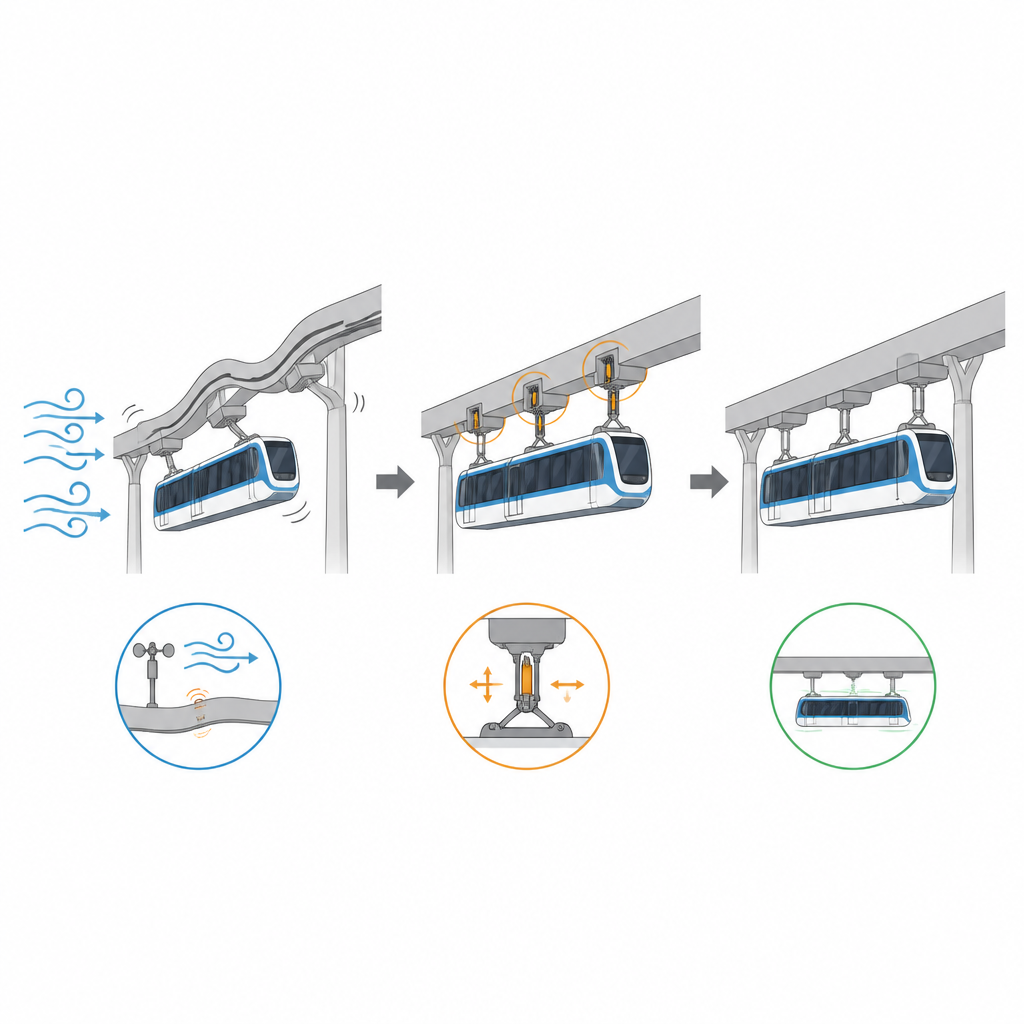
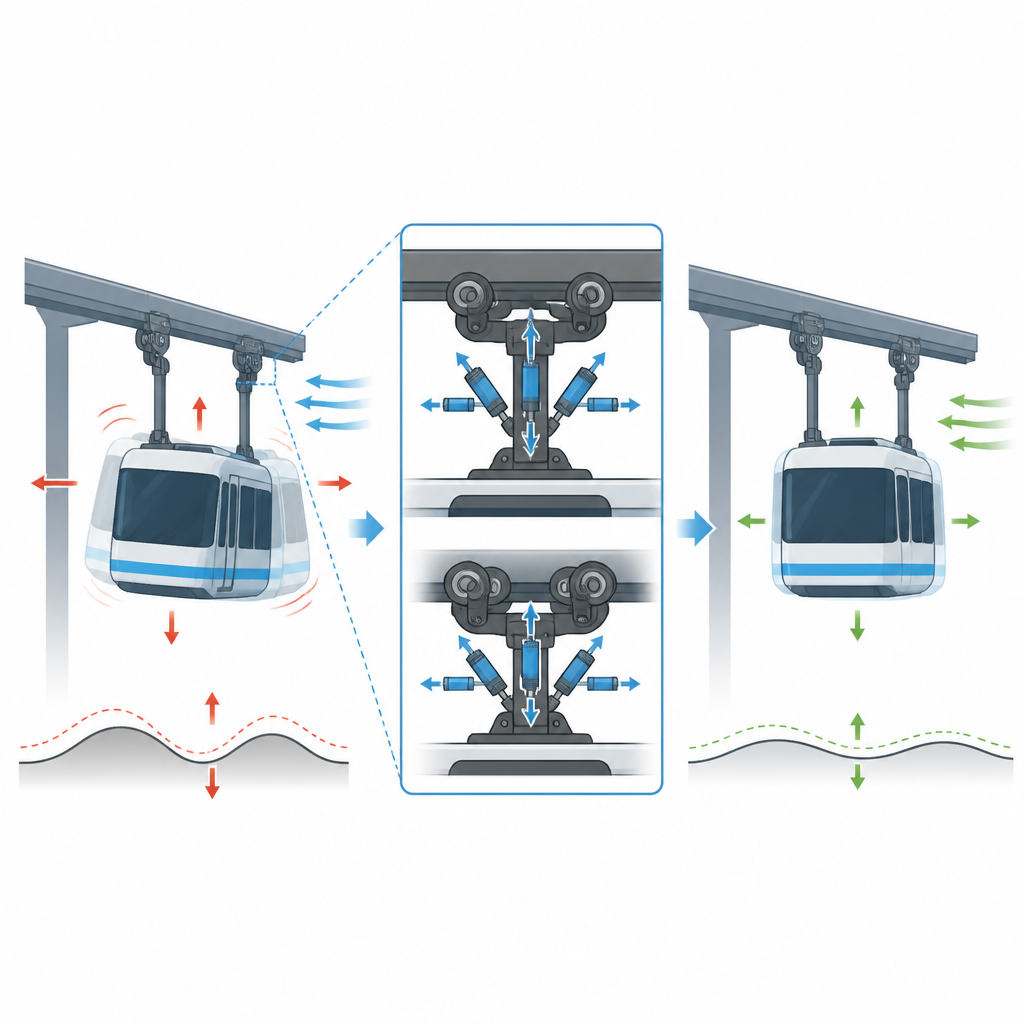
Rayların üzerinde hareket eden geleneksel trenlerin aksine, asılı monoray vagonları bir kirişten sarktığı için yan rüzgarlara ve düzensiz rehberlik yollarına karşı daha hassastır. Yan rüzgarlar vagonu yandan iterken, kirişteki küçük yükseklik değişimleri ve hizalanma hataları tekerlekleri sarsar. Bu etkiler eş zamanlı olarak ve hem yan hem de düşey doğrultularda meydana gelir; bunun sonucunda konforu ve hatta güvenliği etkileyebilecek bağlı hareketler ortaya çıkar. Önceki çalışmalar ağırlıklı olarak sistemin nasıl hareket ettiğine, pasif yay ve sönümleyicilerin nasıl ayarlanacağına veya yarı-aktif cihazların kullanımına odaklandı; oysa yan ve düşey hareketleri birlikte, donanımın gerçekçi sınırları altında ele alan aktif kontrole daha az ilgi gösterildi.
Trenin gerçekçi bir dijital ikizini oluşturmak
Pratikte işe yarayacak bir kontrolör tasarlamak için yazarlar önce carbody, bogie, tekerlekler ve süspansiyon parçaları dahil olmak üzere asılı bir monoray aracının ayrıntılı bir bilgisayar modelini oluşturdular. Ardından bu modeli çalışan bir trenin gerçek ölçümleriyle iyileştirdiler. Simüle edilmiş yolculuk kalite puanları ölçülenlerle eşleşene kadar anahtar parametreleri ayarlayarak, gerçek ray ve rüzgar koşulları altında gerçek araca çok benzeyen davranış gösteren veri odaklı bir "dijital ikiz" elde ettiler. Ayrıca dijital trenin testler sırasında gerçekçi rüzgar esintileri ve tümseklerle karşılaşmasını sağlamak için doğal rüzgarları ve ray kusurlarını istatistiksel olarak modellediler.
Vagonun aktüatörlerin nerede daha etkili olduğunu belirlemesine izin vermek
Aktüatörleri nereye yerleştireceğini tahmin etmek yerine, ekip bir duyarlılık çalışması kullanarak hangi konumların ve doğrultuların vagonun yansal ve düşey sallantısını en güçlü şekilde etkilediğini inceledi. Bu sıralamaya dayanarak bogieler ve asma kirişler üzerinde yedi aktüatör pozisyonu seçtiler. Ardından her bir aktüatörün teker teker uyarıldığı simülasyonlar çalıştırdılar ve her bir kuvvetin vagonun ivmelenmelerini nasıl değiştirdiğini öğrenmek için basit uyarlama yöntemleri kullandılar. Bu, aktüatör kuvvetlerini vagon hareketine bağlayan bir harita üretti ve kontrol çabasının fiziksel olarak gerçekçi bir şekilde dağıtılması için temel oluşturdu.
Daha sakin bir yolculuk için iki katmanlı kontrol yaklaşımı
Çalışmanın özü iki katmanlı bir kontrol çerçevesidir. İç katmanda, basit geribildirim kontrolörleri vagonun yansal ve düşey ivmelerini izler ve bu değerleri sıfıra çekmeyi amaçlayan "sanal" kontrol talepleri üretir. İki çeşit kullanıldı: kazanımları genetik arama ile ayarlanan geleneksel bir kontrolör ve hareketin düzeyi ve hızı değiştikçe kendi kazançlarını nazikçe yeniden ayarlayan bulanık öz-ayar yapan bir versiyon. Dış katmanda ise kuadratik optimizasyon algoritması bu sanal talepleri her bir aktüatör kuvvetine çevirir ve aynı zamanda her aktüatörün itme veya çekme kapasitesi üzerindeki katı sınırları gözetir.
Simülasyonlar yolcu konforu hakkında ne söylüyor
Araştırmacılar, hepsi aynı dış dağıtım katmanını kullanan üç iç kontrolörü karşılaştırdı: klasik optimal kontrolör, sabit kazançlı geribildirim ve bulanık öz-ayar geribildirim. Aynı güçlü yan rüzgarlar ve ray düzensizlikleri altında, kontrolsüz bırakılmaya kıyasla üçü de titreşimi azalttı. Genel olarak en iyi performansı bulanık öz-ayar versiyon gösterdi; ortalama yansal ve düşey ivmeleri yaklaşık beşte bir oranında azalttı ve ani zirveleri yaklaşık üçte bir oranında düşürdü. Standart yolculuk kalite indeksleri de iyileşti ve hareket izleri zaman içinde daha pürüzsüz ve daha az kesintili hale geldi.
Geleceğin monoray yolculuğu için bunun anlamı
Bir yolcu için çalışmanın temel sonucu, rüzgâr estiğinde ve ray kusurlu olduğunda bile daha sessiz, daha stabil bir yolculuğa dönüşür. Basit ivme ölçümleri ile birkaç aktüatör arasında işi akıllıca paylaşan bir yöntemi birleştirerek önerilen çerçeve, araç hareketini gerçekçi donanım sınırları içinde kontrol altında tutar. Yazarlar aktüatör yerleşimlerinin daha da incelenmesi, daha karmaşık donanım etkilerinin ele alınması ve gerçek trenlerde testlerin yapılması gerektiğini not ediyor; ancak sonuçları, dikkatle tasarlanmış aktif kontrolün asılı monorayları günlük kentsel ulaşım için daha konforlu ve çekici kılabileceğini gösteriyor.
Atıf: Jiang, Y., Wang, D., Chen, R. et al. Stability control of suspended monorail vehicles based on PID and quadratic programming allocation. Sci Rep 16, 16566 (2026). https://doi.org/10.1038/s41598-026-52944-3
Anahtar kelimeler: asılı monoray, yolcu konforu, titreşim kontrolü, PID kontrolü, kuadratik programlama