Clear Sky Science · zh
针对6自由度机器人的优化逆运动学解法
如稳健之手般运动的机器人
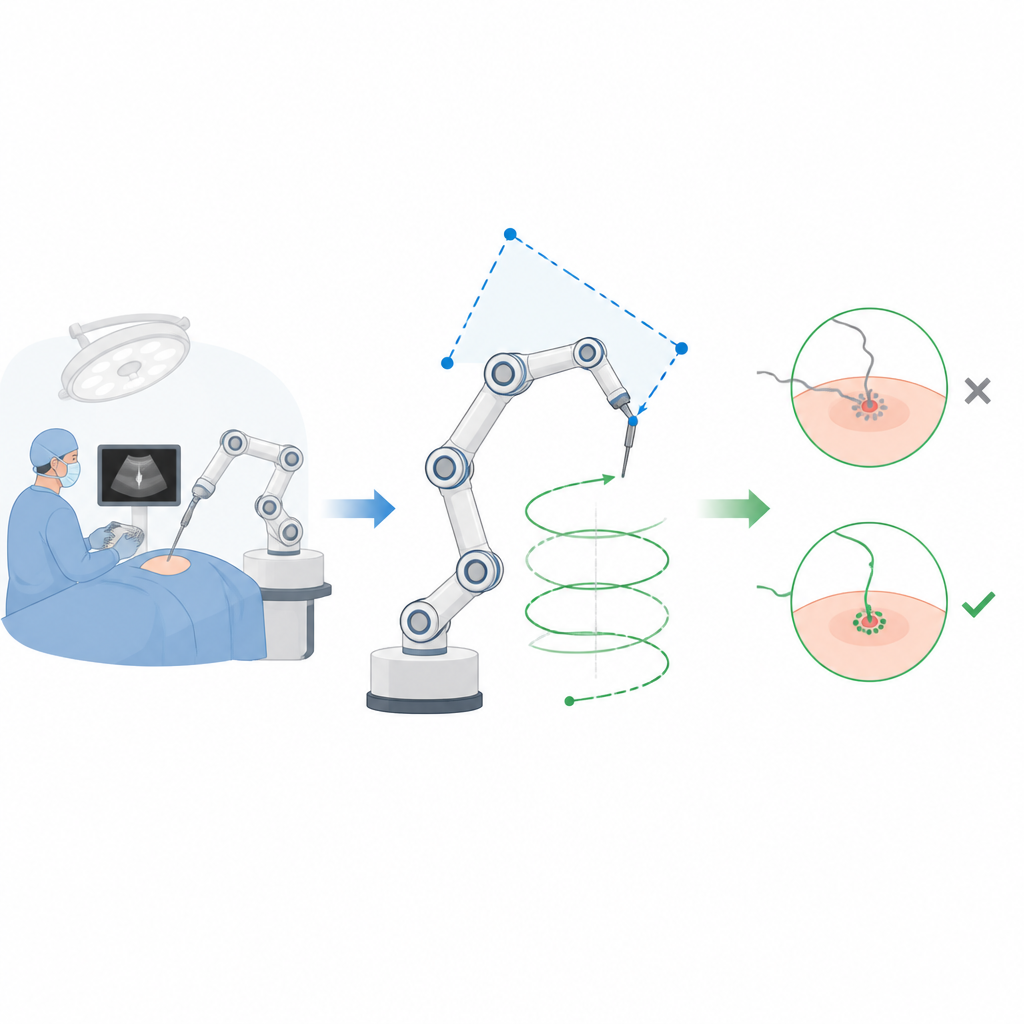
当外科医生使用机器人臂缝合细嫩组织时,每一毫米的千分之一都很重要。机器人必须沿着规划路径快速且平滑地移动,即使其关节处于不利姿态也不例外。本文探讨了不同的计算方法如何精确地告诉一台六关节工业机械臂应如何调整各关节角度,以便其末端沿着期望的空间线尽可能准确且可靠地运动。
机器人如何决定向哪个方向弯曲
机器人臂有点像人的手臂,一个常见问题称为逆运动学:给定你希望机器人末端到达的位置,每个关节应取什么角度?对于结构简单的机器人,工程师可以写出精确公式。但用于外科或制造的现代机械臂往往结构复杂且关节受限严格。在这些情况下,工程师转而使用数值搜索方法,尝试不同的关节组合,直到找到一个既将末端放置在接近目标的位置,又保持在安全范围内的解。
为什么传统捷径并不总是足够
传统的数值求解器速度很快,但它们有点像只看前方几米的司机。被称为序列二次规划(SQP)的方法能在数学地形上迅速向下滑动以找到一个附近的解。当初始猜测已经接近好解时,这种方法效果很好,但如果起点不幸或机器人接近某些小关节变化会引起末端大幅运动的构型,它可能陷入局部劣解。其他方法,例如蚁群优化或分支定界,会更广泛地搜索有前景的区域,但计算时间可能更长。
将搜索策略整合到同一框架
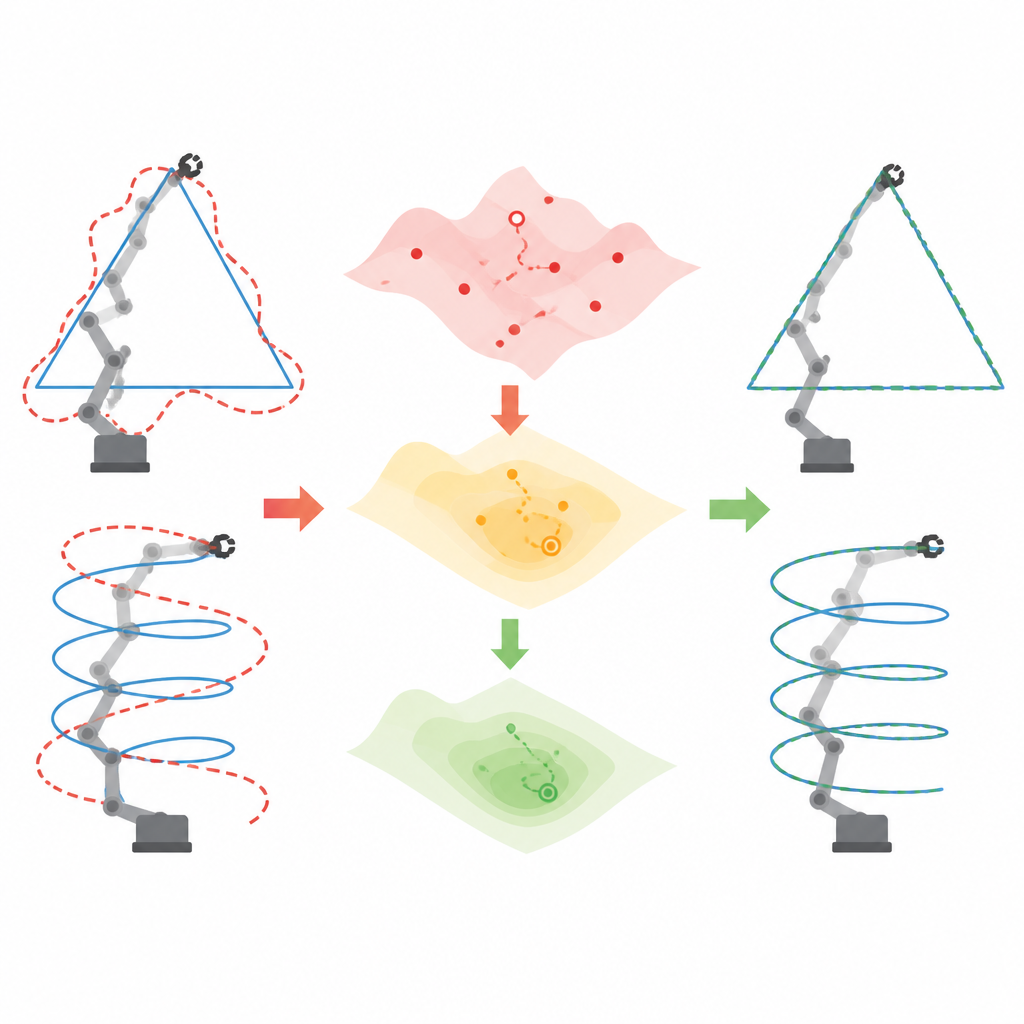
作者围绕一台名为Viper 650s的六关节工业机器人建立了一个统一测试框架。他们研究的每种方法都必须在相同的任务、相同的机器人模型、相同的关节限制和相同的成功度量下求解。选择了两条代表性路径:一个平面三角形和一个三维螺旋,每条由51个目标点定义。对于路径上的每一点,这些方法都要计算关节角,使机器人末端在位置和姿态上尽可能接近期望,同时避免非法关节位置并保持相邻点之间运动的平滑性。
将全局搜索与精细调整相结合
比较了六种求解策略。其中三种是“独立”方法:快速的局部求解器(SQP)、一种区域分割搜索(分支定界)和一种群体启发式搜索(蚁群优化)。另外三种是将这些思想串联的混合方法。一种使用蚁群为SQP建议良好起点;另一种先用分支定界划出有前景的关节区间再用SQP精化;最复杂的设计结合了所有三阶段:先由蚂蚁在整个关节空间中探索以找到有希望的区域,分支定界随后将这些区域缩小为更紧的盒子,最后SQP对结果进行抛光以得到精确的局部解。
测试揭示了什么
团队在三角形和螺旋路径上分别对每种方法运行了20次,并测量了两个主要结果:计算完整轨迹所需的时间以及机器人末端执行轨迹平均偏离理想路径的程度。纯SQP方法在速度上始终占优,因此在计算时间为首要考虑时具有吸引力。然而,结合蚁群搜索、定界搜索和局部精化的三阶段混合方法在两条路径上都产生了最小的平均路径误差,在测试条件下与SQP相比大约减少了四分之一的偏差,但代价是额外的计算开销。
这对真实世界的机器人为何重要
简单来说,这项研究表明,通过谨慎地将广域搜索与精确的局部调优相结合,可以在不更改硬件或底层驱动的情况下,使机械臂更忠实地描绘轨迹。对于像外科缝合或精细装配这类对微小几何差异敏感的任务,三阶段混合提供了更准确的选择,而经典的SQP在速度优先时仍然是不错的选择。这项工作提供了一个通用基准,帮助工程师为苛刻的机器人应用选择和改进运动规划方法。
引用: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
关键词: 逆运动学, 机械臂控制, 外科机器人学, 优化方法, 轨迹跟踪