Clear Sky Science · en
Optimized inverse kinematics solutions for a 6-DOF robot
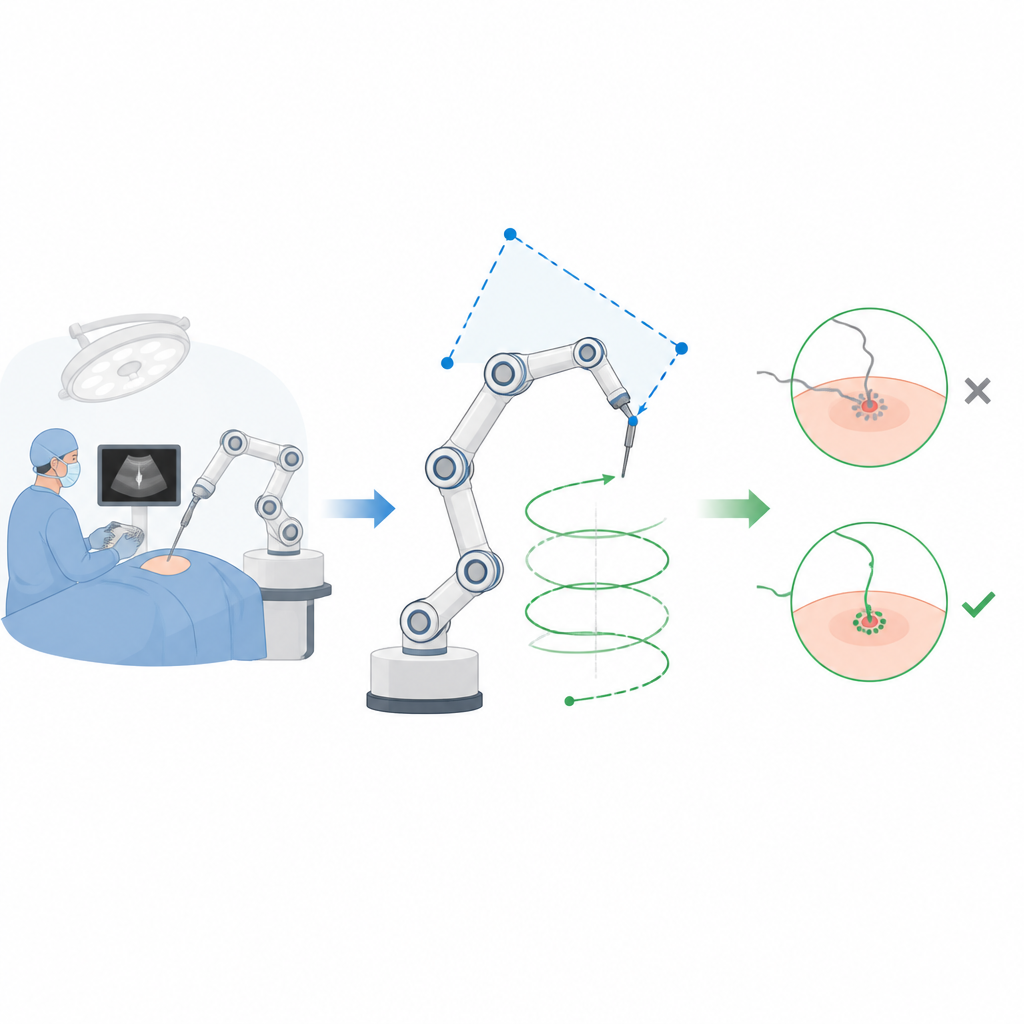
Robots That Move Like a Steady Hand
When a surgeon uses a robotic arm to stitch delicate tissue, every fraction of a millimeter matters. The robot must move quickly and smoothly along a planned path, even when its joints are in awkward positions. This paper explores how different computer methods can tell a six-joint industrial robot arm exactly how to move its joints so that its tip follows a desired line in space as accurately and reliably as possible.
How Robots Decide Which Way to Bend
A robot arm has joints like a human arm, and a common problem is called inverse kinematics: given where you want the robot’s tip to be, what angles should each joint take? For simple robots, engineers can write exact formulas. But modern arms used in surgery or manufacturing often have complicated layouts and tight joint limits. In these cases, engineers turn to numerical search methods that try different joint combinations until they find one that places the tip close to the target while staying within safe ranges.
Why Classic Shortcuts Are Not Always Enough
Traditional numerical solvers are fast, but they act a bit like drivers who only look a few meters ahead. The method known as Sequential Quadratic Programming quickly slides downhill on a mathematical landscape to find a nearby solution. This works well when the first guess is already close to a good answer, but it can get trapped in a poor valley if the starting point is unlucky or the robot is near a configuration where small joint changes cause big motion at the tip. Other approaches, such as Ant Colony Optimization or Branch and Bound, search more widely for promising regions but can take longer to compute.
Putting Search Strategies Under One Roof
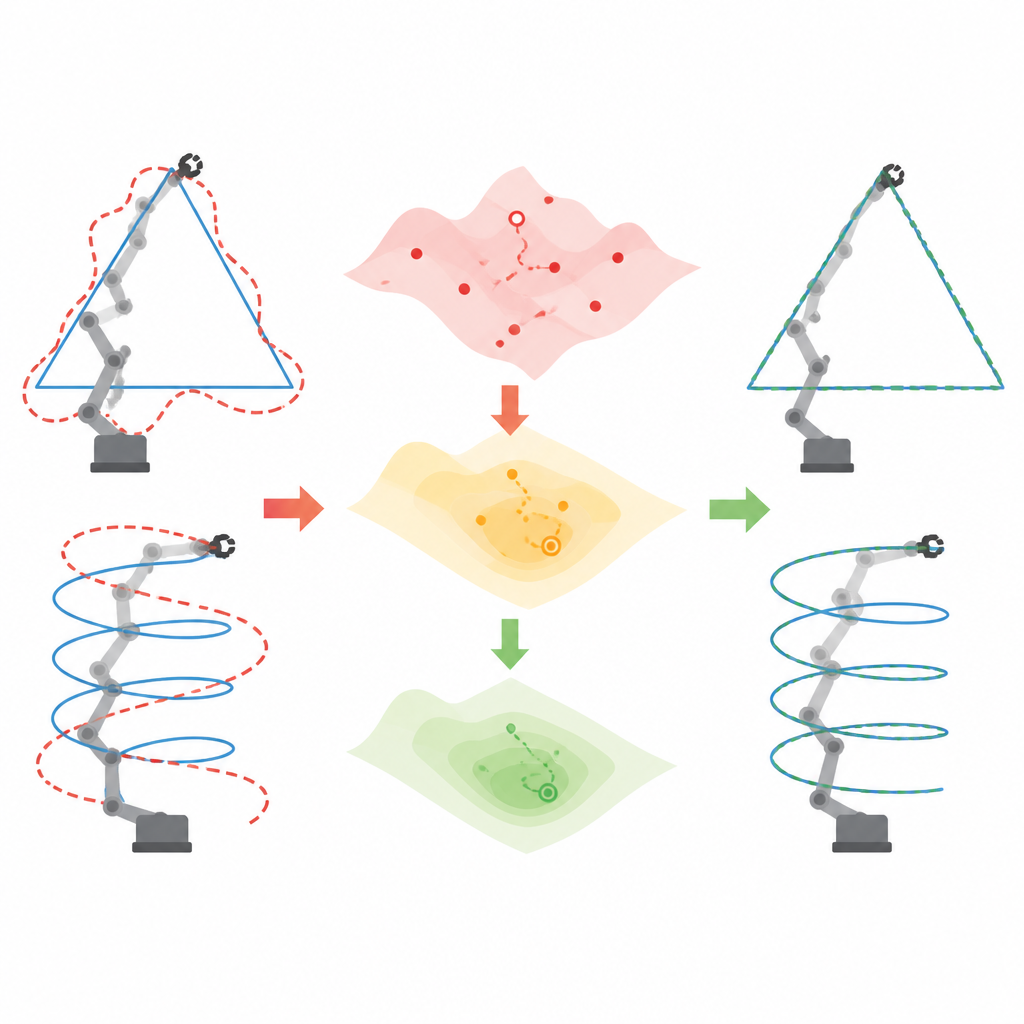
The authors built a single testing framework around a six-joint industrial robot called the Viper 650s. Every method they studied had to solve exactly the same tasks using the same robot model, the same joint limits, and the same measures of success. Two representative paths were chosen: a flat triangle and a three-dimensional helix, each defined by 51 target points. For every point along these paths, the methods had to compute joint angles that placed the robot tip as close as possible to the desired location and orientation, while avoiding illegal joint positions and keeping motion smooth from one point to the next.
Mixing Global Search With Fine Tuning
Six solution strategies were compared. Three were “standalone” methods: the fast local solver (SQP), a region-splitting search (Branch and Bound), and a swarm-inspired search (Ant Colony Optimization). The other three were hybrids that chained these ideas. One used the swarm to suggest a good starting point for SQP. Another used Branch and Bound to carve out promising joint ranges before refining with SQP. The most elaborate design combined all three stages: ants first explored the full joint space to find promising areas, Branch and Bound then narrowed those areas into tighter boxes, and finally SQP polished the result to a precise local solution.
What the Tests Revealed
The team ran each method 20 times on both the triangle and helix paths and measured two main outcomes: how long it took to compute an entire trajectory and how far, on average, the executed path of the robot tip strayed from the ideal path. The plain SQP method was consistently the fastest, making it attractive when computation time is the main concern. However, the three-stage hybrid that blended ant search, bounded search, and local refinement produced the smallest average path error on both paths, trimming deviations by roughly a quarter compared with SQP under the tested conditions, at the cost of extra computation.
Why This Matters for Real-World Robots
In simple terms, this study shows that carefully combining wide-ranging search with precise local tuning can make a robot arm trace a line more faithfully, without changing its hardware or low-level motors. For tasks like surgical suturing or fine assembly, where small geometric differences can be important, the three-stage hybrid offers a more accurate option, while classic SQP remains a good choice when speed is the priority. The work serves as a common benchmark, helping engineers choose and refine motion-planning methods for demanding robotic applications.
Citation: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Keywords: inverse kinematics, robot arm control, surgical robotics, optimization methods, trajectory tracking