Clear Sky Science · ru
Оптимизированные решения обратной кинематики для 6-степенного робота
Роботы, которые двигаются как уверенная рука
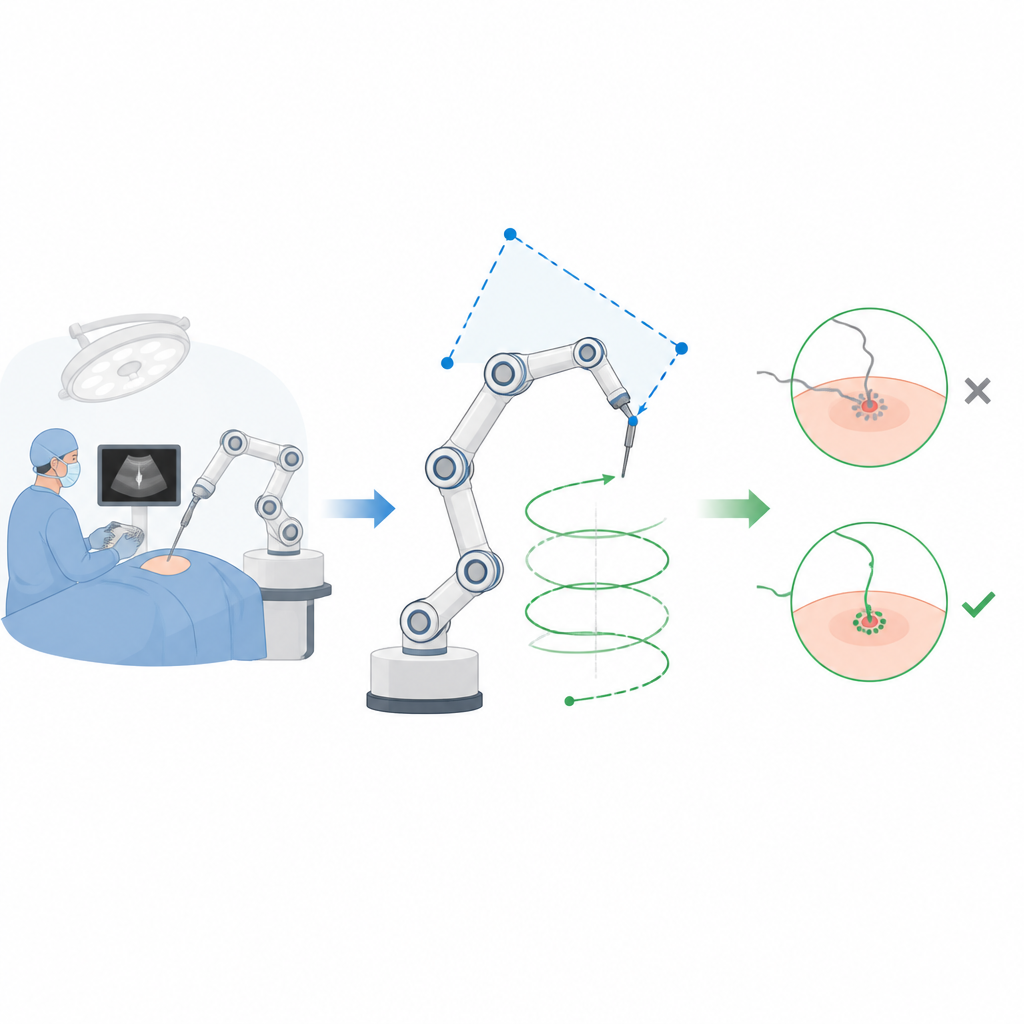
Когда хирург использует роботизированную руку для наложения швов на деликатные ткани, важна каждая доля миллиметра. Робот должен двигаться быстро и плавно по заданной траектории, даже если его суставы находятся в неудобных положениях. В этой статье исследуются разные вычислительные методы, которые определяют, как именно должны поворачиваться швы робота с шестью суставами, чтобы его кончик следовал заданной линии в пространстве максимально точно и надежно.
Как роботы решают, куда сгибаться
Роботизированная рука имеет суставы, подобные человеческой руке, и распространенная задача называется обратной кинематикой: если известно, где должен оказаться кончик робота, какие углы должны принять отдельные суставы? Для простых роботов инженеры могут вывести точные формулы. Но современные манипуляторы, используемые в хирургии или производстве, часто имеют сложную развёртку и жёсткие ограничения по углам суставов. В таких случаях инженеры обращаются к численным методам поиска, которые перебирают различные комбинации углов суставов, пока не найдут такую, что кончик окажется близко к цели и при этом все параметры останутся в безопасных пределах.
Почему классические упрощения не всегда достаточны
Традиционные численные решатели быстры, но ведут себя немного как водители, смотрящие всего в несколько метров вперёд. Метод, известный как последовательное квадратичное программирование (SQP), быстро «скользит» вниз по математическому ландшафту к ближайшему решению. Это хорошо работает, когда начальное приближение уже близко к хорошему ответу, но может застрять в неудачной впадине, если стартовое положение неудачно или робот находится в конфигурации, где малые изменения углов вызывают большие перемещения кончика. Другие подходы, такие как оптимизация на основе муравьиной колонии или метод ветвей и границ, исследуют пространство шире, но могут требовать больше времени на вычисления.
Объединение стратегий поиска в единую схему
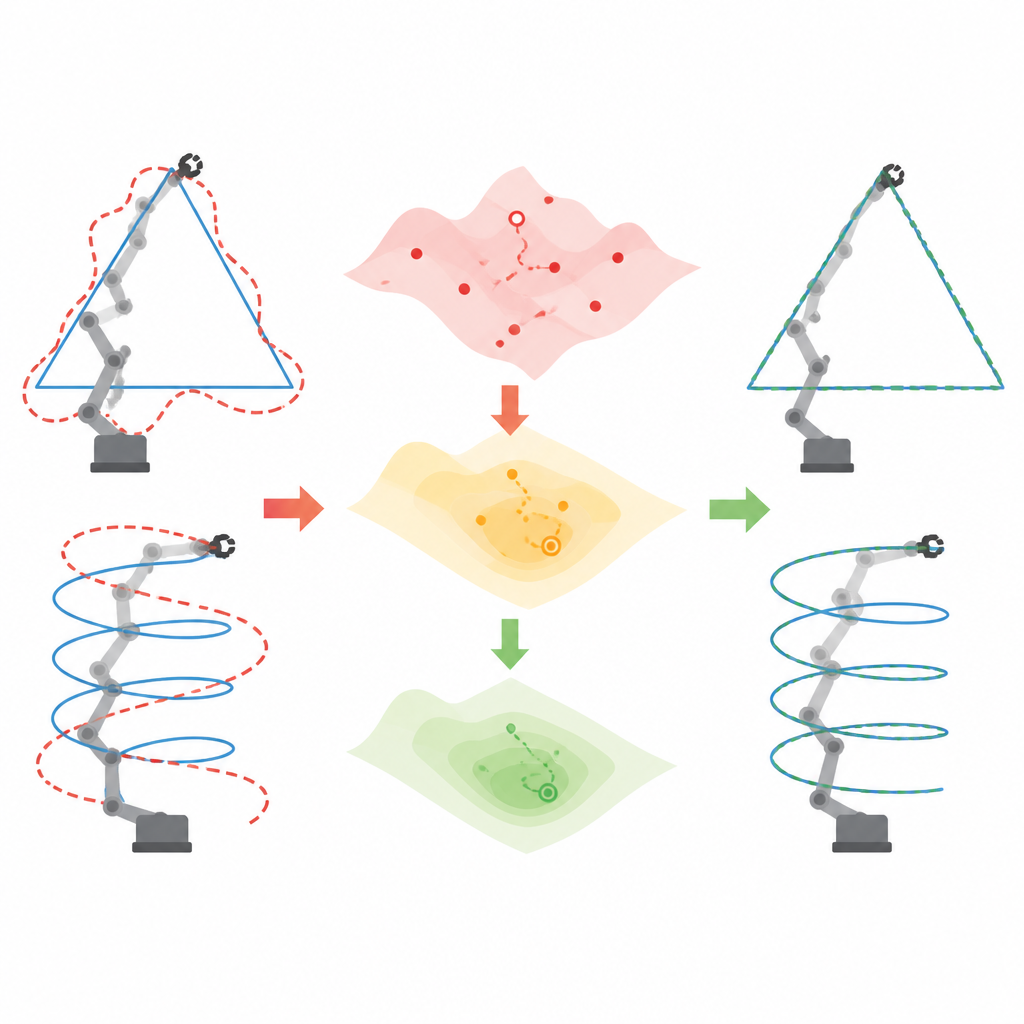
Авторы построили единый тестовый фреймворк вокруг шестосуставного промышленного робота Viper 650s. Каждому изученному методу приходилось решать точно одинаковые задачи, используя одну и ту же модель робота, одни и те же ограничения по суставам и одни и те же критерии успеха. Были выбраны две репрезентативные траектории: плоский треугольник и трёхмерная спираль, каждая задана 51 целевой точкой. Для каждой точки на этих траекториях методы должны были вычислить углы суставов, которые поместят кончик робота как можно ближе к желаемому положению и ориентации, избегая недопустимых положений суставов и обеспечивая плавность переходов между соседними точками.
Сочетание глобального поиска и тонкой настройки
Было сравнение шести стратегий решения. Три были «автономными» методами: быстрый локальный решатель (SQP), поисковый метод с разбиением области (Branch and Bound) и рой-подобный поиск (Ant Colony Optimization). Другие три были гибридными, комбинируя эти идеи. Один использовал рой для предложения хорошего стартового приближения для SQP. Другой применял Branch and Bound, чтобы вырезать перспективные диапазоны углов, а затем уточнял решение с помощью SQP. Наиболее сложная схема объединяла все три этапа: сначала муравьи исследовали всё пространство суставов в поисках перспективных областей, затем Branch and Bound сужал эти области до более компактных коробок, и наконец SQP полировал результат до точного локального решения.
Что показали тесты
Команда запустила каждый метод 20 раз как для траектории треугольника, так и для спирали и измеряла два основных показателя: сколько времени потребовалось на вычисление всей траектории и насколько, в среднем, пройденный роботом путь кончика отклонялся от идеальной траектории. Простая SQP-процедура последовательно оказывалась самой быстрой, что делает её привлекательной, когда главное требование — скорость вычислений. Однако гибрид в три стадии, сочетающий муравьиный поиск, ограниченный поиск и локальное уточнение, показал наименьшую среднюю ошибку траектории для обеих траекторий, уменьшив отклонения примерно на четверть по сравнению с SQP в протестированных условиях, ценой большей вычислительной нагрузки.
Почему это важно для реальных роботов
Говоря простыми словами, исследование демонстрирует, что тщательное сочетание широкого поиска и точной локальной донастройки может заставить роботизированную руку точнее следовать линии, не меняя аппаратную часть или низкоуровневые приводы. Для задач вроде хирургического шитья или тонкой сборки, где небольшие геометрические различия имеют значение, трёхступенчатый гибрид предлагает более точный вариант, тогда как классический SQP остаётся хорошим выбором, если приоритет — скорость. Работа служит общим бенчмарком, помогая инженерам выбирать и совершенствовать методы планирования движений для требовательных робототехнических приложений.
Цитирование: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Ключевые слова: обратная кинематика, управление роботизированной рукой, хирургическая робототехника, методы оптимизации, отслеживание траектории