Clear Sky Science · ja
6自由度ロボットのための最適化された逆運動学ソリューション
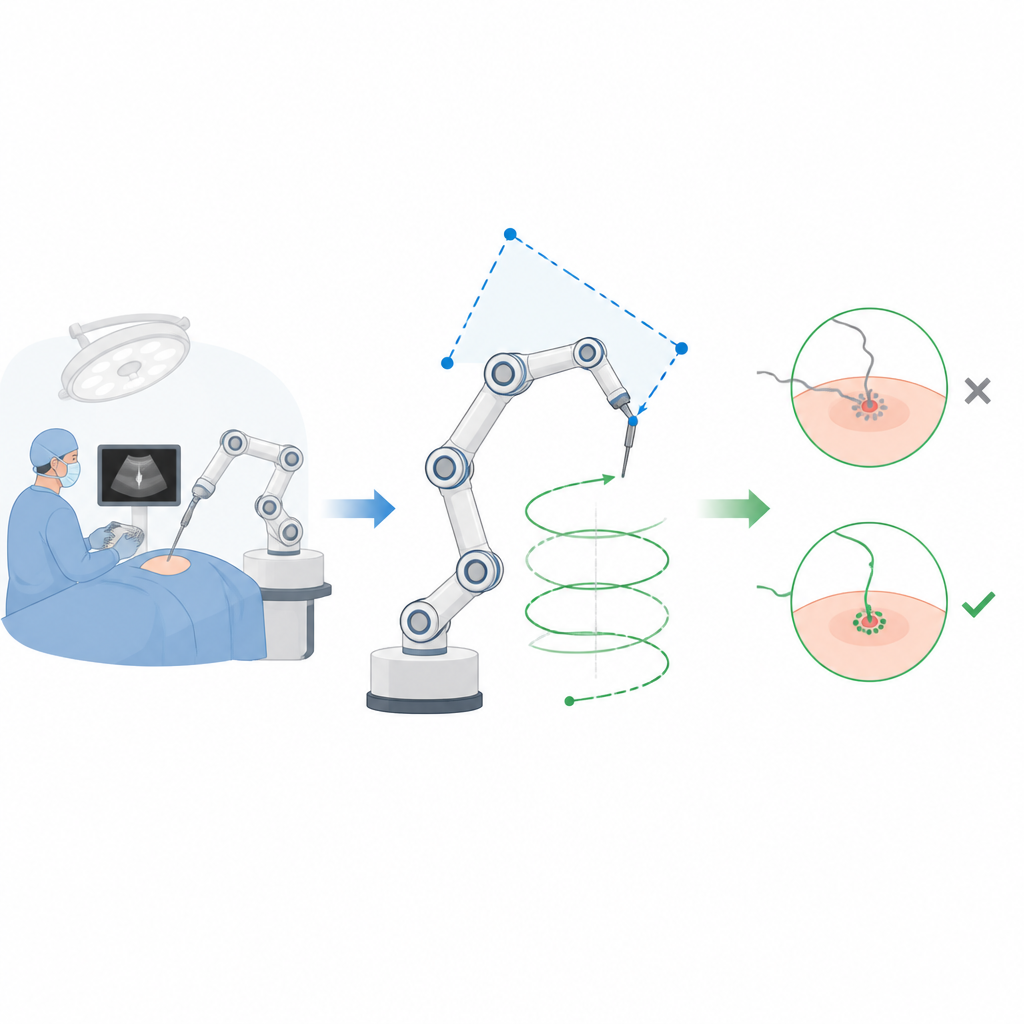
安定した手のように動くロボット
外科医がロボットアームで繊細な組織を縫合する際、ミリ単位以下の差が重要になります。ロボットは関節が不利な角度にあっても、計画された経路に対して素早く滑らかに動く必要があります。本論文では、6関節の産業用ロボットアームの先端が所望の空間上の線にできるだけ正確かつ確実に沿うように、各関節をどのように動かすかを決めるさまざまな計算手法を検討します。
ロボットはどの方向に曲げるかをどう決めるか
ロボットアームは人の腕のように関節を持ち、よく知られる問題が逆運動学です:先端を特定の位置にしたいとき、各関節はどの角度を取るべきか? 単純なロボットでは厳密な式が書けますが、現代の手術用や製造用アームは配置が複雑で関節の制限も厳しいことが多いです。こうした場合、エンジニアは先端を目標に近づけつつ安全な範囲内に保つように、さまざまな関節組み合わせを試す数値的探索手法に頼ります。
従来の近道が常に十分とは限らない理由
従来の数値ソルバは高速ですが、数メートル先だけを見る運転手のように振る舞うことがあります。順次二次計画法(SQP)は数式上の地形を素早く降りて近傍の解を見つけます。初期推定が既に良い近傍にある場合はうまく機能しますが、出発点が不運だったり、関節の小さな変化で先端が大きく動くような配置に近いと、悪い谷に捕まってしまうことがあります。アントコロニー最適化や分枝限定法のような他の手法は有望領域を広く探索しますが、計算時間が長くなることがあります。
探索戦略を一つの枠組みにまとめる
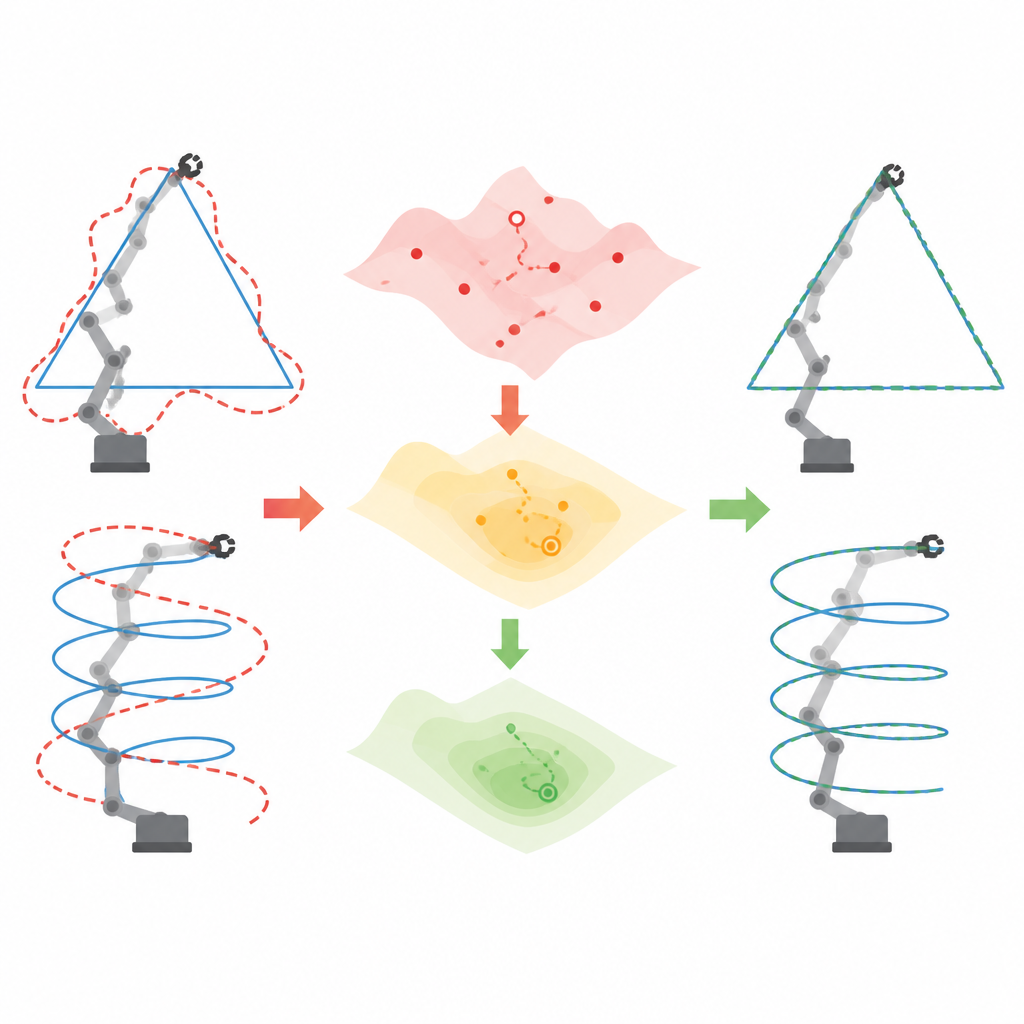
著者らはViper 650sという6関節産業用ロボットを対象に、単一の評価フレームワークを構築しました。研究対象の各手法は同じロボットモデル、同じ関節制限、同じ成功指標で全く同じ課題を解く必要がありました。代表的な経路として平面の三角形と三次元のヘリックスの2つが選ばれ、それぞれ51点の目標点で定義されました。これらの経路の各点について、手法は違法な関節位置を避けつつ、先端の位置と姿勢を目標にできるだけ近づけ、かつ隣接点間の動きを滑らかに保つような関節角を算出しなければなりませんでした。
全域探索と微調整の融合
6種類の解法戦略を比較しました。3つは単独の手法で、速い局所ソルバ(SQP)、領域分割検索(分枝限定法)、群知能に触発された探索(アントコロニー最適化)です。残りの3つはこれらを連結したハイブリッドです。1つはアリ群探索を使ってSQPの良い初期点を提案します。別のものは分枝限定法で有望な関節範囲を切り出してからSQPで精錬します。最も手の込んだ設計は3段階を組み合わせ、まずアリが全関節空間を探索して有望領域を見つけ、次に分枝限定法がそれらの領域を狭いボックスに絞り、最後にSQPが局所解を精密に仕上げます。
テストが明らかにしたこと
研究チームは各手法を三角形経路とヘリックス経路の両方で20回ずつ実行し、主に2つの結果を測定しました:軌道全体を計算するのにかかった時間と、実際にロボット先端が通った軌跡が理想的な経路から平均してどれだけずれたかです。単純なSQP法は一貫して最速で、計算時間が重要な場合に魅力的でした。一方、アリ探索・分枝限定・局所精練を組み合わせた3段階ハイブリッドは両経路で平均的な軌道誤差が最も小さく、テスト条件下でSQPと比べて偏差を概ね4分の1削減しましたが、計算コストは増えました。
実世界のロボットにとっての意義
端的に言えば、本研究は広範な探索と精密な局所調整を慎重に組み合わせることで、ハードウェアや低レベルのモータを変更することなくロボットアームが経路をより忠実になぞれるようになることを示しています。外科縫合や微細な組立てのように小さな幾何学的差が重要な作業では、3段階ハイブリッドがより高精度な選択肢を提供し、速度が優先される場合には従来のSQPが依然として良い選択肢です。本研究は共通のベンチマークとして機能し、要求の厳しいロボット用途に向けた運動計画手法の選択と改良を支援します。
引用: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
キーワード: 逆運動学, ロボットアーム制御, 手術用ロボット, 最適化手法, 軌道追従