Clear Sky Science · fr
Solutions d''inverse cinématique optimisées pour un robot à 6 degrés de liberté
Des robots qui bougent comme une main sûre
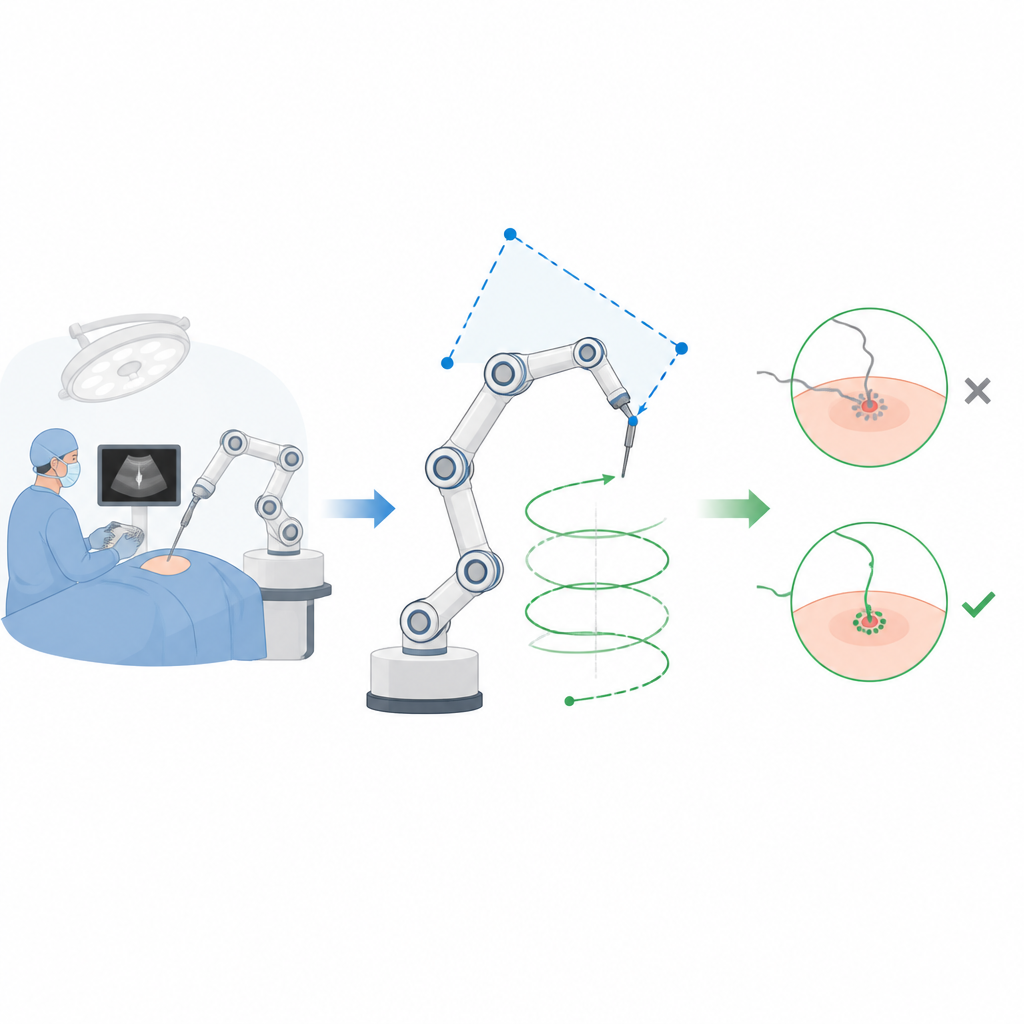
Lorsque un chirurgien utilise un bras robotisé pour suturer des tissus délicats, chaque fraction de millimètre compte. Le robot doit se déplacer rapidement et en douceur le long d''une trajectoire planifiée, même lorsque ses articulations sont dans des positions inconfortables. Cet article explore comment différentes méthodes informatiques peuvent indiquer à un bras industriel à six articulations exactement comment orienter ses articulations pour que son extrémité suive une ligne désirée dans l''espace avec la plus grande précision et fiabilité possibles.
Comment les robots décident où se plier
Un bras robotisé possède des articulations comme un bras humain, et un problème courant s''appelle la cinématique inverse : étant donné l''emplacement souhaité de l''extrémité du robot, quels angles chaque articulation doit-elle prendre ? Pour des robots simples, les ingénieurs peuvent écrire des formules exactes. Mais les bras modernes utilisés en chirurgie ou en production ont souvent des architectures complexes et des limites d''articulation strictes. Dans ces cas, les ingénieurs recourent à des méthodes de recherche numérique qui testent différentes combinaisons d''articulations jusqu''à en trouver une qui place l''extrémité près de la cible tout en restant dans des plages sûres.
Pourquoi les raccourcis classiques ne suffisent pas toujours
Les solveurs numériques traditionnels sont rapides, mais ils agissent un peu comme des conducteurs qui ne regardent qu''à quelques mètres devant eux. La méthode connue sous le nom de programmation quadratique séquentielle (SQP) descend rapidement une pente sur un paysage mathématique pour trouver une solution voisine. Cela fonctionne bien lorsque l''estimation initiale est déjà proche d''une bonne réponse, mais elle peut rester piégée dans une vallée médiocre si le point de départ est malheureux ou si le robot se trouve près d''une configuration où de petits changements d''articulation provoquent de grands mouvements de l''extrémité. D''autres approches, comme l''optimisation par colonie de fourmis ou la méthode Branch and Bound, explorent plus largement des régions prometteuses mais peuvent nécessiter plus de temps de calcul.
Rassembler les stratégies de recherche sous un même toit
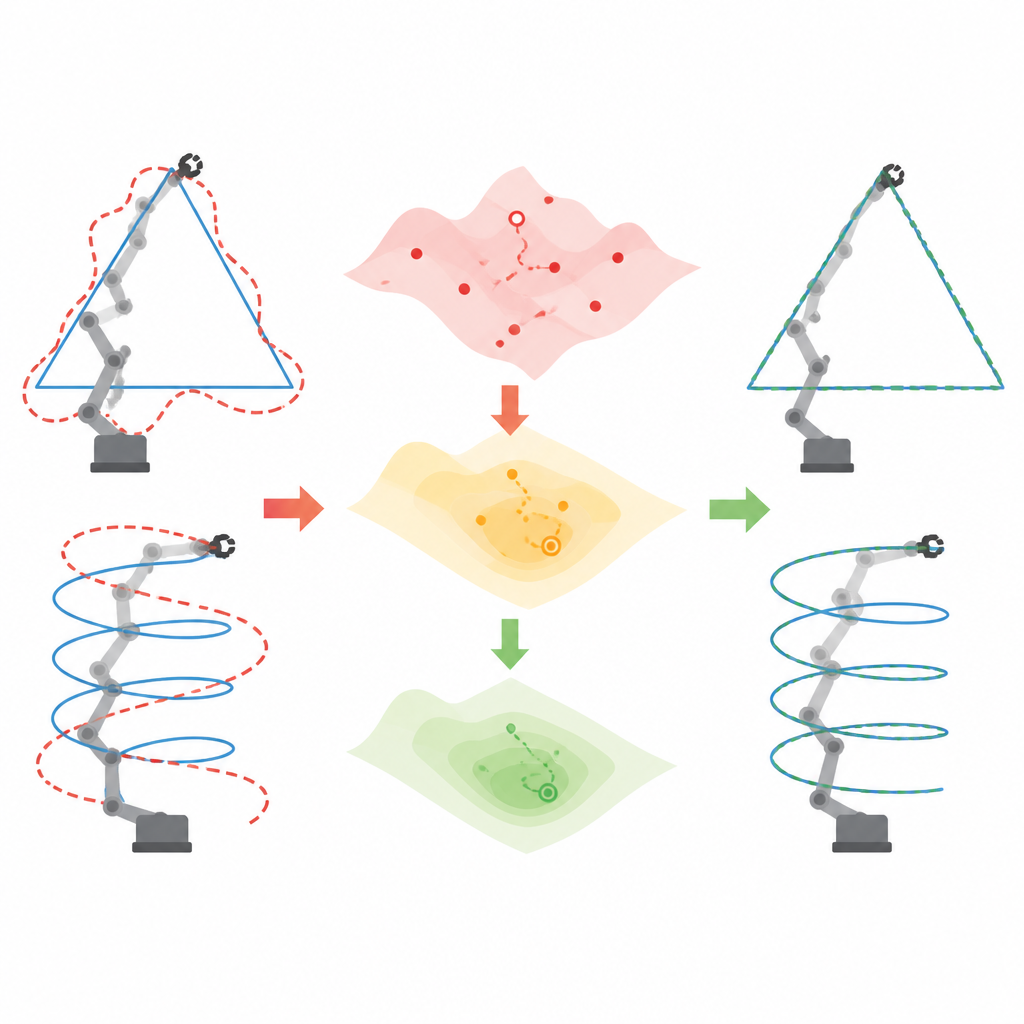
Les auteurs ont construit un cadre de test unique autour d''un robot industriel à six articulations appelé Viper 650s. Chaque méthode étudiée devait résoudre exactement les mêmes tâches en utilisant le même modèle de robot, les mêmes limites d''articulation et les mêmes mesures de réussite. Deux trajectoires représentatives ont été choisies : un triangle plat et une hélice tridimensionnelle, chacune définie par 51 points cibles. Pour chaque point le long de ces trajectoires, les méthodes devaient calculer des angles d''articulation qui plaçaient l''extrémité du robot aussi près que possible de la position et de l''orientation désirées, tout en évitant des positions d''articulation interdites et en maintenant une transition fluide d''un point au suivant.
Mélanger recherche globale et réglage fin
Six stratégies de solution ont été comparées. Trois étaient des méthodes « autonomes » : le solveur local rapide (SQP), une recherche par division de région (Branch and Bound) et une recherche inspirée des essaims (optimisation par colonie de fourmis). Les trois autres étaient des hybrides enchaînant ces idées. L''un utilisait la colonie de fourmis pour proposer un bon point de départ pour SQP. Un autre employait Branch and Bound pour dégrossir des plages d''articulations prometteuses avant de raffiner avec SQP. Le dispositif le plus élaboré combinait les trois étapes : les fourmis exploraient d''abord l''espace complet des articulations pour trouver des régions prometteuses, Branch and Bound resserrait ensuite ces régions en boîtes plus étroites, et enfin SQP polissait le résultat pour obtenir une solution locale précise.
Ce que les tests ont révélé
L''équipe a exécuté chaque méthode 20 fois sur les trajectoires triangle et hélice et a mesuré deux résultats principaux : le temps nécessaire pour calculer une trajectoire complète et l''écart moyen entre la trajectoire exécutée par l''extrémité du robot et la trajectoire idéale. La méthode SQP pure était systématiquement la plus rapide, ce qui la rend attractive lorsque le temps de calcul est la principale contrainte. Cependant, l''hybride en trois étapes qui combinaient recherche par fourmis, recherche bornée et raffinement local a produit la plus faible erreur de trajectoire moyenne sur les deux trajectoires, réduisant les déviations d''environ un quart par rapport à SQP dans les conditions testées, au prix d''un coût de calcul plus élevé.
Pourquoi cela compte pour les robots du monde réel
En termes simples, cette étude montre que la combinaison soignée d''une exploration étendue et d''un réglage local précis peut amener un bras robotisé à tracer une ligne plus fidèlement, sans modifier son matériel ou ses actionneurs de bas niveau. Pour des tâches comme la suture chirurgicale ou l''assemblage de précision, où de petites différences géométriques sont importantes, l''hybride en trois étapes offre une option plus précise, tandis que le SQP classique reste un bon choix lorsque la vitesse est prioritaire. Ce travail sert de référence commune, aidant les ingénieurs à choisir et affiner les méthodes de planification de mouvement pour des applications robotiques exigeantes.
Citation: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Mots-clés: cinématique inverse, commande de bras robotisé, robotique chirurgicale, méthodes d''optimisation, suivi de trajectoire