Clear Sky Science · ar
حلول متحسّنة للحركيات العكسية لروبوت بست درجات حرية
روبوتات تتحرّك كأنها يد ثابتة
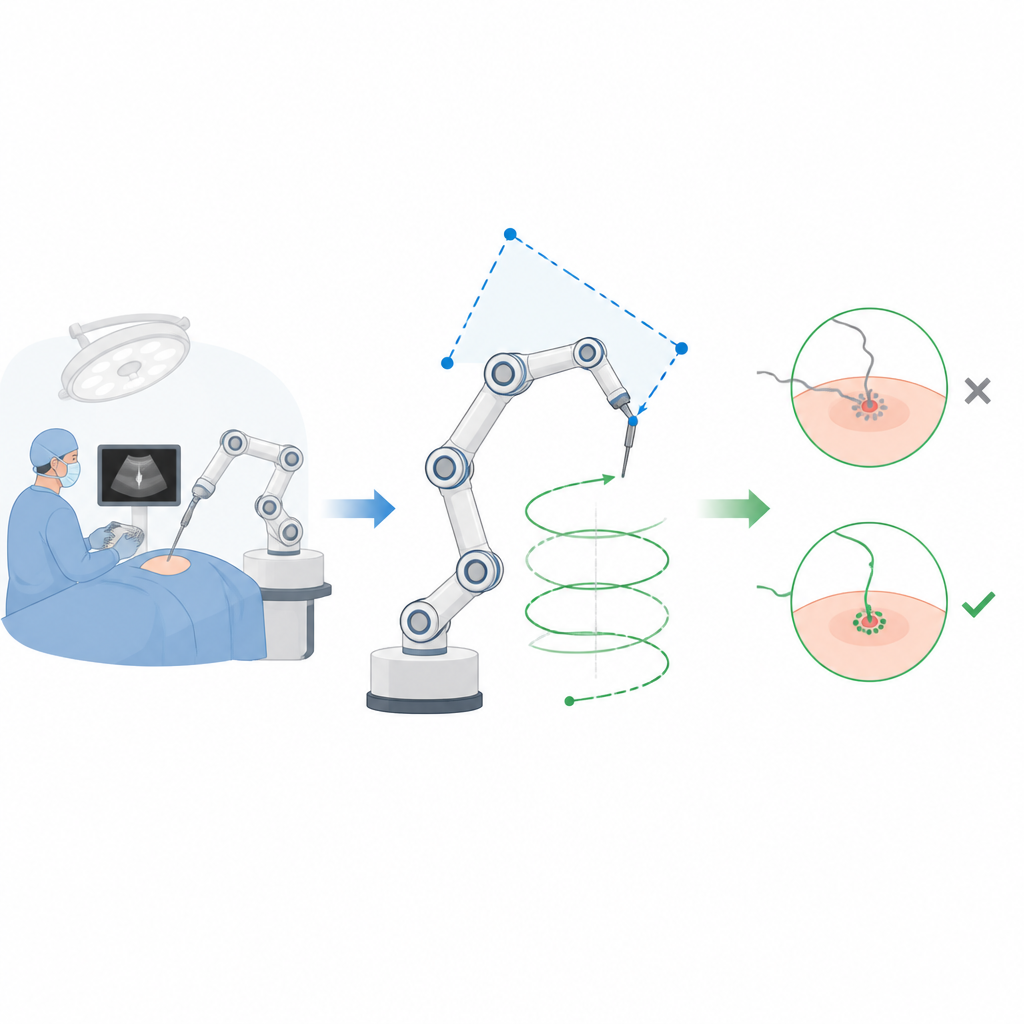
عندما يستخدم الجراح ذراعًا روبوتية لخياطة نسيج حساس، تهم كل أجزاء المليمتر. يجب أن يتحرك الروبوت بسرعة وسلاسة على طول مسار مخطط، حتى لو كانت مفاصله في أوضاع محرجة. تستكشف هذه الورقة كيف يمكن لطرائق حاسوبية مختلفة أن تحدد بالضبط كيف يجب أن تحرك مفاصل ذراع روبوت صناعي بست مفاصل حتى يتبع طرفه خطًا مرغوبًا في الفراغ بأكبر قدر من الدقة والموثوقية.
كيف يقرّر الروبوت كيف ينحني
لذراع الروبوت مفاصل تشبه الذراع البشرية، ومشكلة شائعة تُعرف بالحركيات العكسية: بالنظر إلى المكان الذي تريد أن يكون فيه طرف الروبوت، ما الزوايا التي ينبغي أن تتخذها كل مفصل؟ بالنسبة للروبوتات البسيطة، يمكن للمهندسين كتابة صيغ دقيقة. لكن الأذرع الحديثة المستخدمة في الجراحة أو التصنيع غالبًا ما يكون لها تخطيطات معقّدة وحدود مفصلية ضيّقة. في هذه الحالات، يلجأ المهندسون إلى طرائق بحث عددية تجرب توليفات مفصلية مختلفة حتى تجد واحدة تضع الطرف قريبًا من الهدف مع البقاء ضمن نطاقات آمنة.
لماذا الحيل التقليدية لا تكفي دائمًا
المحولات العددية التقليدية سريعة، لكنها تتصرّف قليلاً مثل سائقين ينظرون لبضعة أمتار فقط إلى الأمام. الطريقة المعروفة باسم البرمجة التربيعية المتتابعة (SQP) تنزلق بسرعة على منحدر رياضي لإيجاد حل قريب. هذا ينجح جيدًا عندما يكون التخمين الأولي قريبًا من الجواب الجيد، لكن قد تحاصرها وادٍ ضعيف إذا كان نقطة البداية سيّئة أو كان الروبوت قرب تكوين حيث تغييرات صغيرة في المفاصل تسبب حركة كبيرة في الطرف. مناهج أخرى، مثل تحسين مستعمرة النمل أو الفرع والتقليص، تبحث على نطاق أوسع عن مناطق واعدة لكنها قد تتطلب وقتًا حسابيًا أطول.
ضمّ استراتيجيات البحث تحت سقف واحد
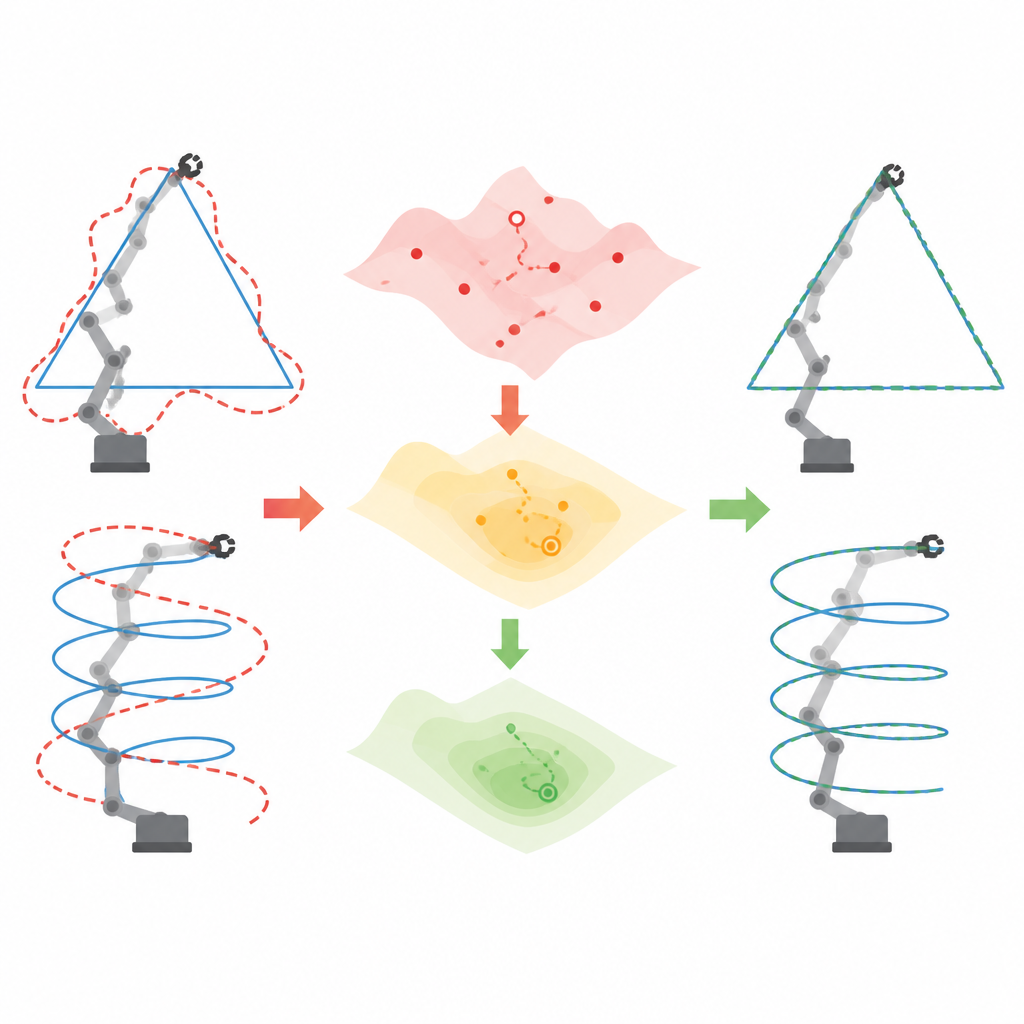
بنى المؤلفون إطار اختبار واحد حول روبوت صناعي بست مفاصل يدعى Viper 650s. كل طريقة درسها الفريق كان عليها حل نفس المهام تمامًا باستخدام نفس نموذج الروبوت، ونفس حدود المفاصل، ونفس مقاييس النجاح. اختير مساران نموذجيان: مثلث مسطح ووَرم ثلاثي الأبعاد، كل منهما معرف بـ51 نقطة مستهدفة. عند كل نقطة على هذه المسارات، كان على الطرق حساب زوايا المفاصل التي تضع طرف الروبوت أقرب ما يكون إلى الموقع والاتجاه المطلوبين، مع تجنّب أوضاع مفصلية غير مسموح بها والحفاظ على سلاسة الحركة من نقطة إلى أخرى.
مزج البحث العالمي مع التنقيح الدقيق
قورن ستّ استراتيجيات حل. كانت ثلاث منها «مستقلة»: المحلّل المحلي السريع (SQP)، وبحث تقسيم المنطقة (Branch and Bound)، وبحث مستلهم من أسراب (Ant Colony Optimization). الثلاث الأخرى كانت هجينة تربط هذه الأفكار. استخدمت إحداها الأسراب لاقتراح نقطة بداية جيدة لـSQP. استخدمت أخرى Branch and Bound لتقسيم نطاقات المفاصل الواعدة قبل التكرار بـSQP. التصميم الأكثر تعقيدًا جمع المراحل الثلاث: استكشفت النمل المساحة الكاملة للمفاصل أولًا لإيجاد مناطق واعدة، ثم ضيّق Branch and Bound تلك المناطق إلى صناديق أضيق، وأخيرًا قام SQP بصقل النتيجة إلى حل محلي دقيق.
ما كشفته الاختبارات
شغّل الفريق كل طريقة 20 مرة على كل من مسار المثلث والورم، وقاس نتيجتين رئيسيتين: كم استغرق حساب المسار بأكمله وكم انحرف، في المتوسط، المسار المنفّذ لطرف الروبوت عن المسار المثالي. كانت طريقة SQP العادية الأسرع باستمرار، ما يجعلها جذابة عندما يكون وقت الحساب هو الاعتبار الأساسي. مع ذلك، أنتج الهجين ثلاثي المراحل الذي جمع بحث النمل والبحث المقيد والتكرير المحلي أصغر خطأ متوسط في المسار على كلا المسارين، مخفّضًا الانحرافات بنحو ربع مقارنةً بـSQP في الظروف المختبرة، مقابل تكلفة حسابية إضافية.
لماذا يهم هذا للروبوتات العملية
بشكل مبسط، تُظهر هذه الدراسة أن الجمع المدروس بين البحث واسع النطاق والتوليف المحلي الدقيق يمكن أن يجعل ذراع الروبوت يتتبّع خطًا بأمانة أكبر، دون تغيير الأجهزة أو المحرّكات منخفضة المستوى. لمهام مثل الخياطة الجراحية أو التجميع الدقيق، حيث قد تكون الاختلافات الهندسية الصغيرة مهمة، يقدّم الهجين ثلاثي المراحل خيارًا أدق، بينما تظل SQP التقليدية خيارًا جيدًا عندما تكون السرعة هي الأولوية. تعمل هذه الدراسة كمعيار مشترك، مما يساعد المهندسين على اختيار وتحسين طرائق تخطيط الحركة للتطبيقات الروبوتية المتطلبة.
الاستشهاد: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
الكلمات المفتاحية: الحركيات العكسية, التحكم بذراع الروبوت, الروبوتات الجراحية, طرق التحسين, تتبّع المسار