Clear Sky Science · pl
Optymalizowane rozwiązania odwrotnej kinematyki dla robota 6-DOF
Roboty poruszające się jak pewna ręka
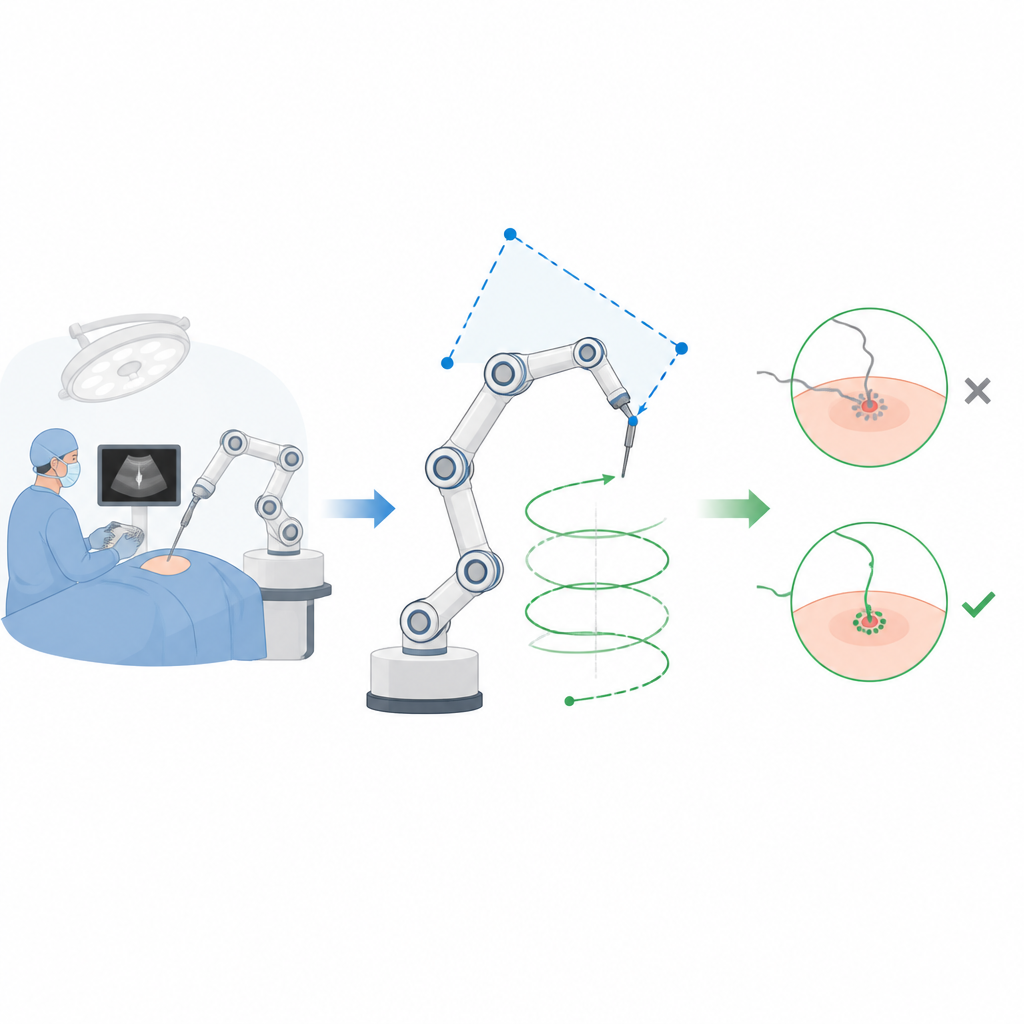
Gdy chirurg używa ramienia robotycznego do zszywania delikatnej tkanki, każdy ułamek milimetra ma znaczenie. Robot musi poruszać się szybko i płynnie wzdłuż zaplanowanej ścieżki, nawet gdy jego stawy znajdują się w niewygodnych pozycjach. Artykuł bada, jak różne metody komputerowe mogą dokładnie określić, jak powinny poruszać się stawy sześciostawowego manipulatora przemysłowego, aby jego końcówka podążała po żądanej linii w przestrzeni tak dokładnie i niezawodnie, jak to możliwe.
Jak roboty decydują, jak się zginać
Ramię robota ma stawy jak ramię człowieka, a powszechny problem nazywa się odwrotną kinematyką: znając miejsce, w którym ma być końcówka robota, jakie kąty powinny przyjąć poszczególne stawy? Dla prostych robotów inżynierowie mogą zapisać dokładne wzory. Jednak nowoczesne ramiona stosowane w chirurgii czy produkcji mają często skomplikowaną budowę i wąskie ograniczenia stawów. W takich przypadkach inżynierowie sięgają po numeryczne metody przeszukiwania, które próbują różnych kombinacji ustawień stawów, aż znajdą takie, które umieszczają końcówkę blisko celu, jednocześnie pozostając w bezpiecznych zakresach.
Dlaczego klasyczne skróty nie zawsze wystarczają
Tradycyjne solvery numeryczne są szybkie, ale zachowują się trochę jak kierowcy patrzący tylko kilka metrów przed sobą. Metoda znana jako Sequential Quadratic Programming (SQP) szybko zsuwa się w dół po matematycznym krajobrazie, aby znaleźć pobliskie rozwiązanie. Działa to dobrze, gdy punkt startowy jest już blisko dobrego rozwiązania, ale może utknąć w niekorzystnym dolinie, jeśli początkowe przybliżenie jest pechowe lub robot znajduje się blisko konfiguracji, w której niewielkie zmiany stawów powodują duże przesunięcia końcówki. Inne podejścia, takie jak Optymalizacja Zainspirowana Kolonią Mrówek (Ant Colony Optimization) czy Branch and Bound, przeszukują szerzej obiecujące regiony, ale mogą wymagać dłuższych obliczeń.
Łączenie strategii przeszukiwania w jednym podejściu
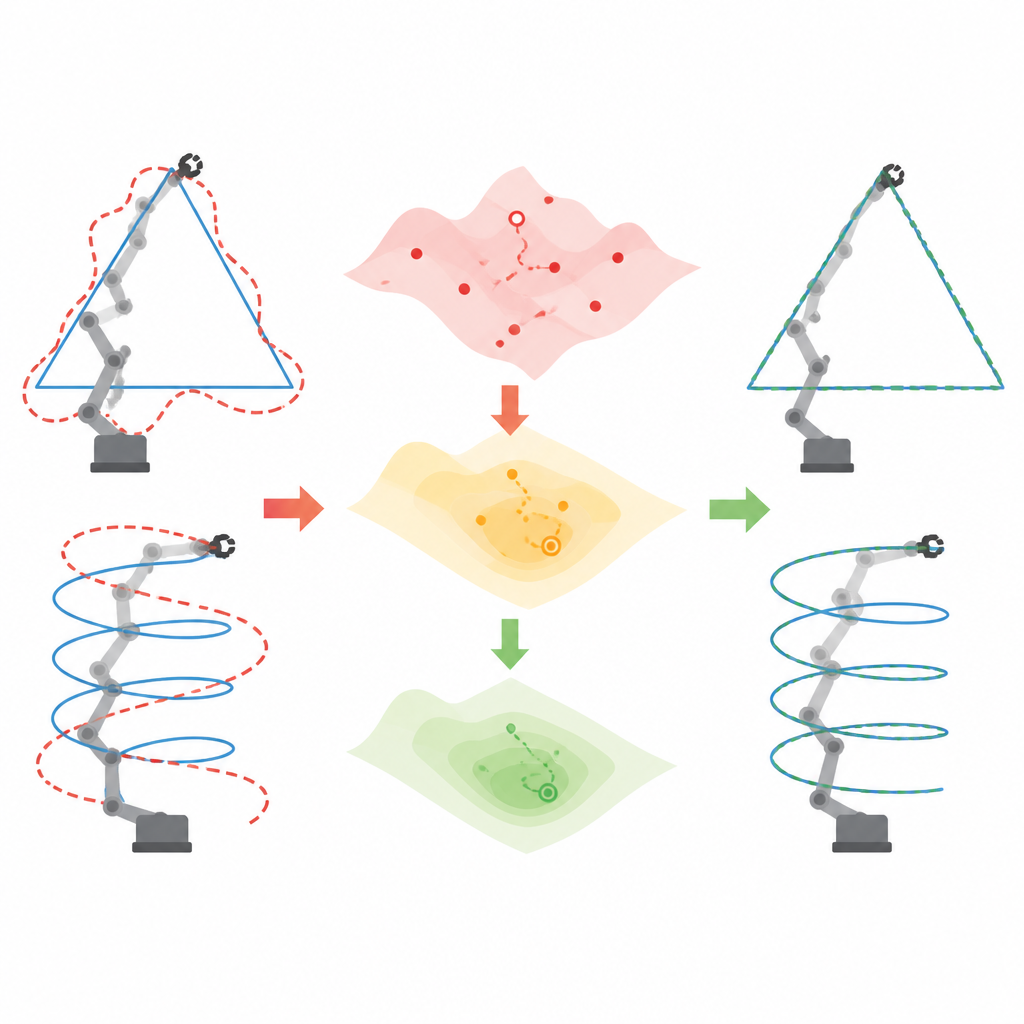
Autorzy zbudowali jednolite środowisko testowe wokół sześciostawowego manipulatora przemysłowego o nazwie Viper 650s. Każda badana metoda musiała rozwiązać dokładnie te same zadania, używając tego samego modelu robota, tych samych ograniczeń stawów i tych samych miar sukcesu. Wybrano dwie reprezentatywne ścieżki: płaski trójkąt i trójwymiarową helisę, z każdą zdefiniowaną przez 51 punktów docelowych. Dla każdego punktu na tych ścieżkach metody musiały obliczyć kąty stawów, które umieszczą końcówkę robota jak najbliżej żądanej pozycji i orientacji, unikając nielegalnych pozycji stawów i zachowując płynność ruchu między kolejnymi punktami.
Mieszanie przeszukiwania globalnego z dopracowywaniem
Porównano sześć strategii rozwiązywania. Trzy były metodami „samodzielnymi”: szybki lokalny solver (SQP), przeszukiwanie przez dzielenie regionu (Branch and Bound) oraz przeszukiwanie inspirowane rojami (Ant Colony Optimization). Pozostałe trzy to hybrydy łączące te pomysły. Jedna używała kolonii mrówek do zasugerowania dobrego punktu startowego dla SQP. Inna wykorzystywała Branch and Bound do wyodrębnienia obiecujących zakresów kątów stawów przed ich dopracowaniem za pomocą SQP. Najbardziej rozbudowana konstrukcja łączyła wszystkie trzy etapy: mrówki najpierw eksplorowały pełną przestrzeń stawów, aby znaleźć obiecujące obszary, Branch and Bound następnie zawężał te obszary do węższych pudełek, a na koniec SQP wygładzał wynik, osiągając precyzyjne lokalne rozwiązanie.
Co ujawniły testy
Zespół uruchomił każdą metodę 20 razy zarówno na ścieżce trójkąta, jak i helisy, mierząc dwa główne wyniki: ile zajęło obliczenie całej trajektorii oraz o ile średnio wykonana ścieżka końcówki robota odbiegała od idealnej. Sama metoda SQP była konsekwentnie najszybsza, co czyni ją atrakcyjną, gdy czas obliczeń jest kluczowy. Jednak hybryda w trzech etapach łącząca przeszukiwanie mrówkowe, przeszukiwanie z ograniczeniami i lokalne dopracowanie dała najmniejszy średni błąd ścieżki na obu trasach, zmniejszając odchylenia o około jedną czwartą w porównaniu z SQP w warunkach testowanych, kosztem większych nakładów obliczeniowych.
Dlaczego to ma znaczenie dla robotów w praktyce
Mówiąc prościej, badanie pokazuje, że staranne łączenie szerokiego przeszukiwania z precyzyjnym lokalnym dostrojeniem może sprawić, że ramię robota będzie odtwarzało linię wierniej, bez zmiany sprzętu czy niskopoziomowych silników. Dla zadań takich jak chirurgiczne szycie czy precyzyjny montaż, gdzie drobne różnice geometryczne mają znaczenie, hybryda trzystopniowa oferuje dokładniejszą opcję, podczas gdy klasyczne SQP pozostaje dobrym wyborem, gdy priorytetem jest szybkość. Praca służy też jako wspólny punkt odniesienia, pomagając inżynierom wybierać i doskonalić metody planowania ruchu dla wymagających zastosowań robotycznych.
Cytowanie: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Słowa kluczowe: odwrotna kinematyka, sterowanie ramieniem robota, robotyka chirurgiczna, metody optymalizacji, śledzenie trajektorii