Clear Sky Science · es
Soluciones optimizadas de cinemática inversa para un robot de 6 GL
Robots que se mueven como una mano firme
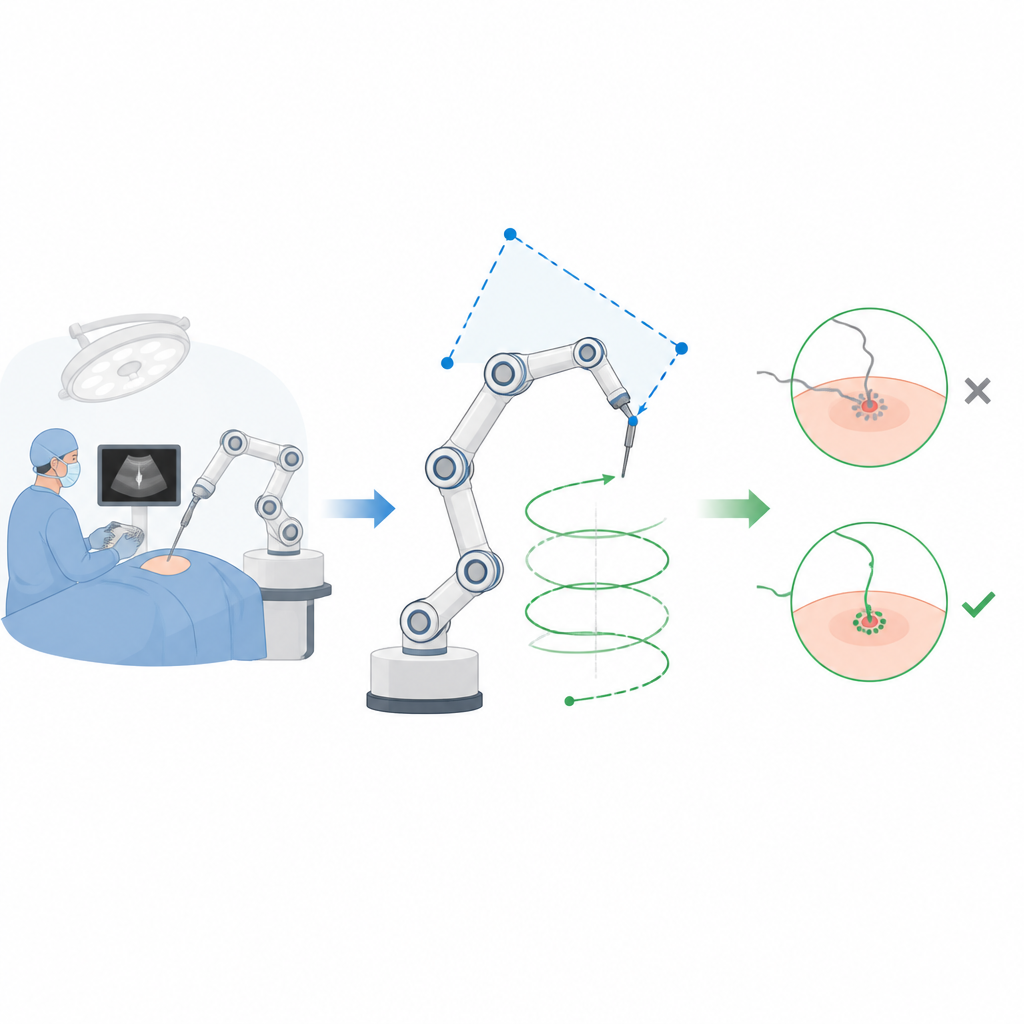
Cuando un cirujano utiliza un brazo robótico para suturar tejido delicado, cada fracción de milímetro cuenta. El robot debe moverse de forma rápida y suave a lo largo de una trayectoria planificada, incluso cuando sus articulaciones quedan en posiciones incómodas. Este artículo explora cómo distintos métodos computacionales pueden indicar a un brazo industrial de seis articulaciones exactamente cómo mover sus juntas para que la punta siga una línea deseada en el espacio con la mayor precisión y fiabilidad posible.
Cómo deciden los robots hacia dónde doblarse
Un brazo robótico tiene articulaciones como un brazo humano, y un problema habitual se llama cinemática inversa: dado el lugar donde quieres que esté la punta del robot, ¿qué ángulos deben adoptar las articulaciones? Para robots simples, los ingenieros pueden escribir fórmulas exactas. Pero los brazos modernos usados en cirugía o fabricación suelen tener configuraciones complejas y límites de articulación estrictos. En esos casos, los ingenieros recurren a métodos numéricos de búsqueda que prueban distintas combinaciones de articulaciones hasta encontrar una que sitúe la punta lo más cerca posible del objetivo, manteniéndose dentro de rangos seguros.
Por qué los atajos clásicos no siempre bastan
Los solucionadores numéricos tradicionales son rápidos, pero actúan un poco como conductores que solo miran unos metros por delante. El método conocido como Programación Cuadrática Secuencial (SQP) desciende rápidamente por un paisaje matemático para encontrar una solución cercana. Esto funciona bien cuando la suposición inicial ya está cerca de una buena respuesta, pero puede quedar atrapado en un valle pobre si el punto de partida es desafortunado o el robot está cerca de una configuración donde pequeños cambios en las articulaciones provocan grandes movimientos de la punta. Otros enfoques, como la Optimización por Colonia de Hormigas o Branch and Bound, buscan más ampliamente regiones prometedoras, pero pueden tardar más en calcularse.
Reuniendo estrategias de búsqueda bajo un mismo techo
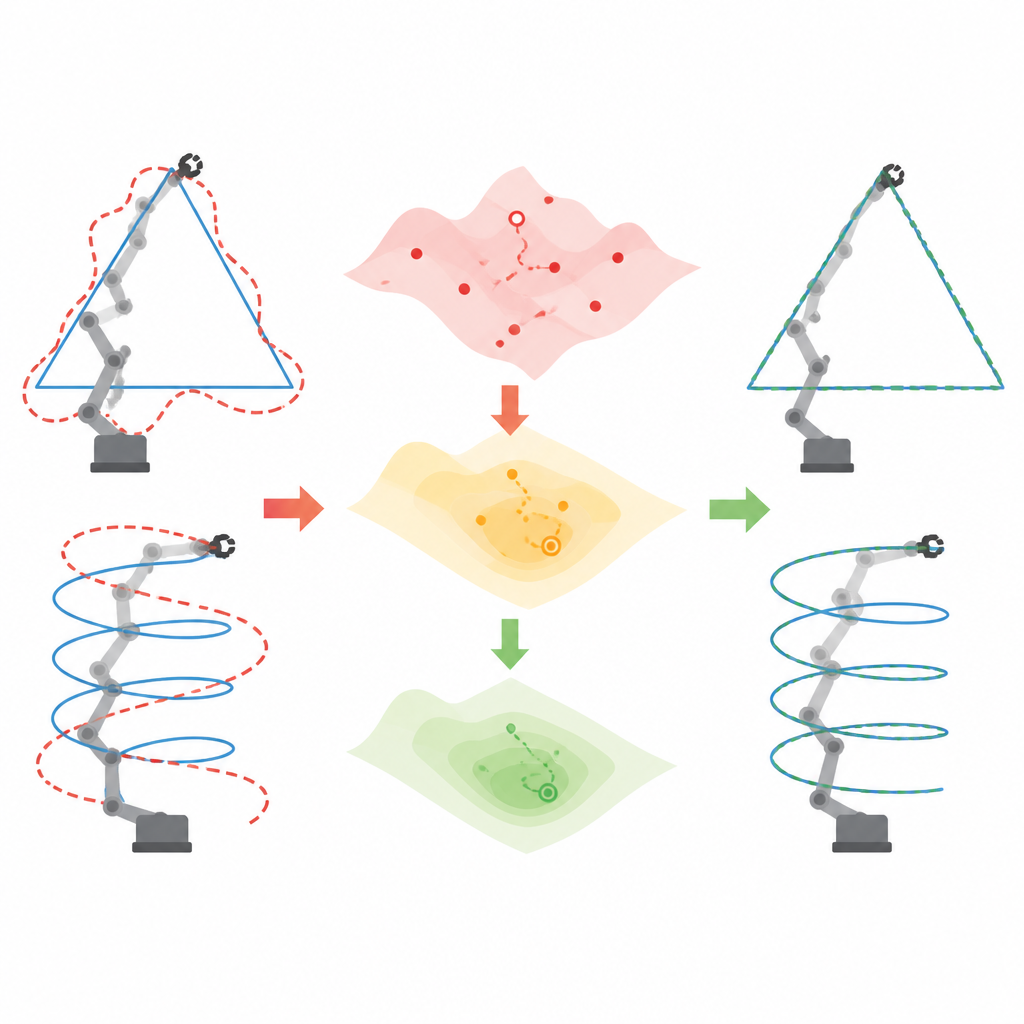
Los autores construyeron un único marco de prueba alrededor de un robot industrial de seis articulaciones llamado Viper 650s. Cada método estudiado tuvo que resolver exactamente las mismas tareas usando el mismo modelo del robot, los mismos límites de articulación y las mismas medidas de éxito. Se escogieron dos trayectorias representativas: un triángulo plano y una hélice tridimensional, cada una definida por 51 puntos objetivo. Para cada punto a lo largo de esas trayectorias, los métodos tuvieron que calcular ángulos articulares que colocaran la punta del robot lo más cerca posible de la ubicación y orientación deseadas, evitando posiciones articulares ilegales y manteniendo el movimiento suave de un punto al siguiente.
Mezclando búsqueda global con afinado fino
Se compararon seis estrategias de solución. Tres eran métodos “independientes”: el solucionador local rápido (SQP), una búsqueda por división de regiones (Branch and Bound) y una búsqueda inspirada en enjambres (Optimización por Colonia de Hormigas). Las otras tres eran híbridos que encadenaban estas ideas. Uno usó el enjambre para sugerir un buen punto de partida para SQP. Otro empleó Branch and Bound para recortar rangos articulares prometedores antes de refinar con SQP. El diseño más elaborado combinó las tres etapas: primero las hormigas exploraron el espacio completo de articulaciones para encontrar áreas prometedoras, Branch and Bound luego estrechó esas áreas en cajas más ajustadas y finalmente SQP pulió el resultado hasta una solución local precisa.
Qué revelaron las pruebas
El equipo ejecutó cada método 20 veces tanto en las trayectorias del triángulo como de la hélice y midió dos resultados principales: cuánto tiempo tardó en computarse toda una trayectoria y cuánto se desvió, en promedio, la trayectoria ejecutada por la punta del robot respecto de la trayectoria ideal. El método SQP puro fue consistentemente el más rápido, lo que lo hace atractivo cuando el tiempo de cómputo es la principal preocupación. Sin embargo, el híbrido de tres etapas que combinó búsqueda por hormigas, búsqueda acotada y refinamiento local produjo el menor error medio de trayectoria en ambas rutas, reduciendo las desviaciones en aproximadamente una cuarta parte frente a SQP bajo las condiciones probadas, a costa de un mayor cómputo.
Por qué esto importa para robots del mundo real
En términos sencillos, este estudio muestra que combinar con cuidado una búsqueda de alcance amplio con un ajuste local preciso puede hacer que un brazo robótico trace una línea con mayor fidelidad, sin cambiar su hardware ni sus motores de bajo nivel. Para tareas como la sutura quirúrgica o el montaje fino, donde pequeñas diferencias geométricas pueden ser importantes, el híbrido de tres etapas ofrece una opción más precisa, mientras que el SQP clásico sigue siendo una buena elección cuando la velocidad es la prioridad. El trabajo sirve como un punto de referencia común, ayudando a los ingenieros a elegir y perfeccionar métodos de planificación de movimiento para aplicaciones robóticas exigentes.
Cita: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Palabras clave: cinemática inversa, control de brazos robóticos, robótica quirúrgica, métodos de optimización, seguimiento de trayectorias