Clear Sky Science · tr
6-BAĞIMSIZLıK DERECELİ robot için optimize edilmiş ters kinematik çözümleri
El Gibi Sabit Hareket Eden Robotlar
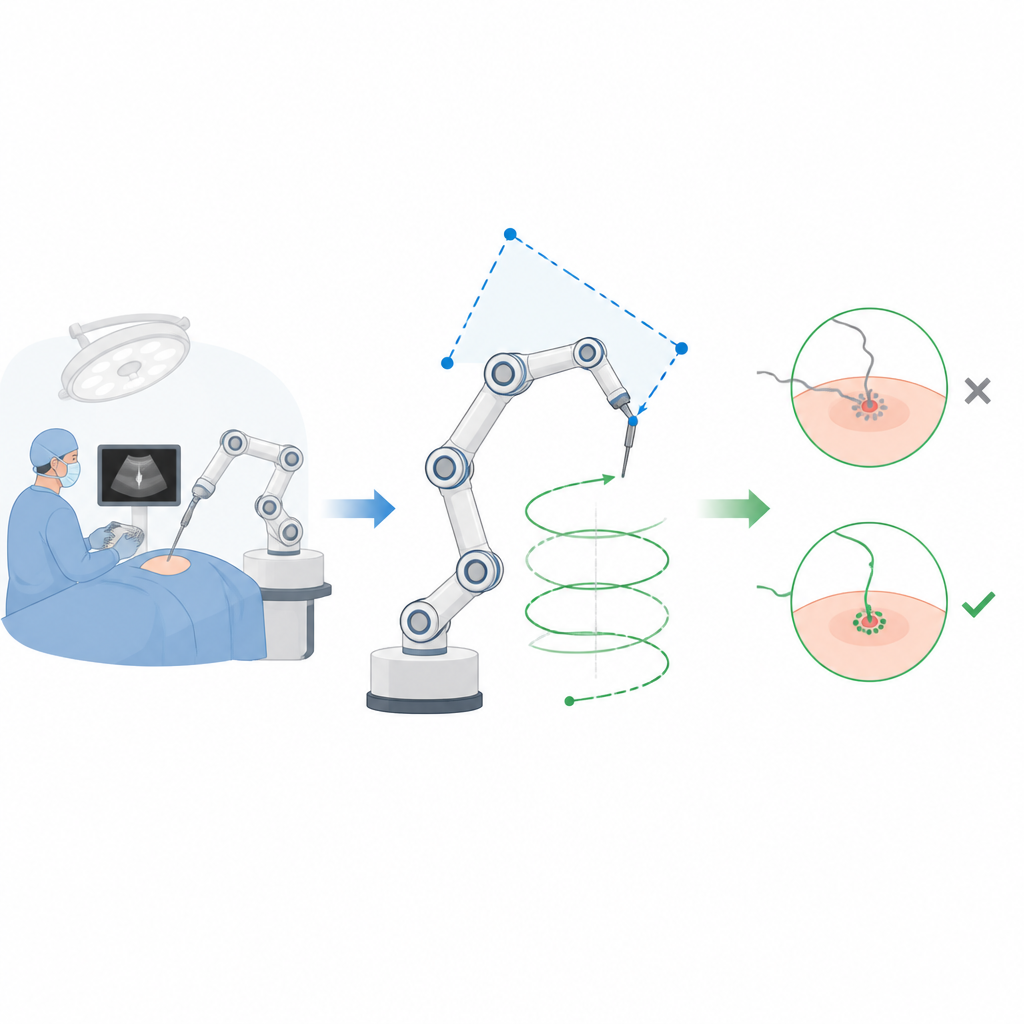
Bir cerrah hassas dokuyu dikmek için robotik bir kol kullandığında her milimetrenin kesri önemlidir. Robot, eklemleri garip pozisyonlarda olsa bile planlanmış bir yol boyunca hızlı ve düzgün hareket etmelidir. Bu makale, altı eklemli endüstriyel bir robot kolunun ucunun uzaydaki istenen hattı olabildiğince doğru ve güvenilir şekilde takip etmesi için eklemlerini tam olarak nasıl hareket ettirmesi gerektiğini hesaplayan farklı bilgisayar yöntemlerini inceliyor.
Robotlar Hangi Yöne Kıvrılacaklarına Nasıl Karar Verir
Bir robot kolun insan kolu gibi eklemleri vardır ve yaygın bir sorun ters kinematik olarak adlandırılır: robotun ucu nereye gitmeli belli olduğunda, her eklem hangi açıları almalıdır? Basit robotlar için mühendisler kesin formüller yazabilir. Ancak cerrahi veya üretimde kullanılan modern kollar genellikle karmaşık düzenlere ve sıkı eklem sınırlarına sahiptir. Bu durumlarda mühendisler, ucun hedefe yakın bir konuma gelmesini sağlarken güvenli aralıklar içinde kalacak eklem kombinasyonlarını bulmak için farklı kombinasyonları deneyen sayısal arama yöntemlerine başvurur.
Klasik Kısayollar Her Zaman Yeterli Değildir
Geleneksel sayısal çözücüler hızlıdır, ancak birkaç metre önünü gören sürücüler gibi davranırlar. Ardışık İkinci Derece Programlama (Sequential Quadratic Programming - SQP) olarak bilinen yöntem, matematiksel bir arazide hızlıca aşağı kayarak yakın bir çözüm bulur. Bu, ilk tahmin zaten iyi bir cevaba yakınsa iyi çalışır, ancak başlangıç noktası talihsizse veya robot, küçük eklem değişikliklerinin uçta büyük hareketlere yol açtığı bir konfigürasyona yakınsa kötü bir çukura takılabilir. Karınca Koloni Optimizasyonu veya Böl ve Fatih (Branch and Bound) gibi diğer yaklaşımlar daha geniş alanları arar, ancak hesaplama açısından daha uzun sürebilirler.
Arama Stratejilerini Tek Çatı Altında Toplamak
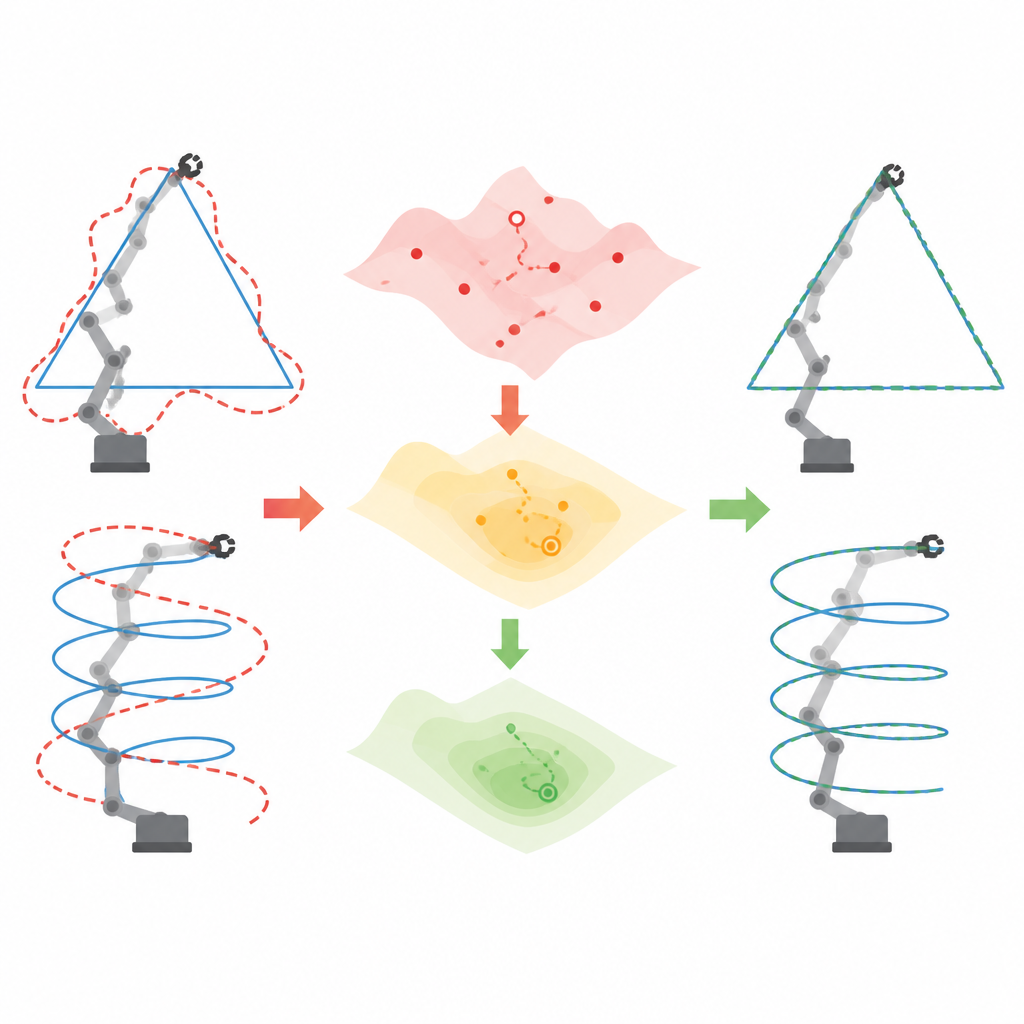
Yazarlar, Viper 650s adlı altı eklemli bir endüstriyel robot etrafında tek bir test çerçevesi kurdu. İncelenen her yöntem aynı görevleri aynı robot modeli, aynı eklem sınırları ve aynı başarı ölçütlerini kullanarak çözmek zorundaydı. İki temsilci yol seçildi: düz bir üçgen ve üç boyutlu bir heliks; her biri 51 hedef noktasıyla tanımlandı. Bu yollar üzerindeki her nokta için yöntemlerin, robot ucunu istenen konum ve yöngereke en yakın şekilde yerleştirecek eklem açılarını hesaplaması, yasadışı eklem pozisyonlarından kaçınması ve bir noktadan diğerine hareketi düzgün tutması gerekiyordu.
Küresel Aramayı İnce Ayarla Karıştırmak
Altı çözüm stratejisi karşılaştırıldı. Üçü tek başına çalışan yöntemlerdi: hızlı yerel çözücü (SQP), bölge-bölme araması (Branch and Bound) ve sürü ilhamlı bir arama (Ant Colony Optimization). Diğer üçü bu fikirleri zincirleyen hibritlerdi. Birinde sürü, SQP için iyi bir başlangıç noktası önermek üzere kullanıldı. Başka birinde Branch and Bound, SQP ile rafine edilmeden önce umut vaat eden eklem aralıklarını oyuyordu. En ayrıntılı tasarım ise üç aşamayı birleştirdi: önce karıncalar tam eklem uzayını keşfederek umut vaat eden alanları buldu, sonra Branch and Bound bu alanları daha sıkı kutulara daralttı ve son olarak SQP sonucu hassas bir yerel çözüme parlatı.
Testlerin Ne Gösterdiği
Takım her yöntemi hem üçgen hem de heliks yollarında 20 kez çalıştırdı ve iki ana çıktıyı ölçtü: bir tüm trajektörünün hesaplanmasının ne kadar sürdüğü ve ortalama olarak robot ucunun yürütülen yolunun ideal yoldan ne kadar saptığı. Düz SQP yöntemi tutarlı şekilde en hızlıydı; bu da hesaplama süresinin birincil endişe olduğu durumlarda onu cazip kılıyor. Ancak karınca araması, sınırlı arama ve yerel iyileştirmeyi harmanlayan üç aşamalı hibrit, her iki yolda da en küçük ortalama yol hatasını üretti ve test edilen koşullar altında SQP'ye kıyasla sapmaları yaklaşık dörtte bir oranında azalttı; bunun maliyeti ise daha fazla hesaplama süresiydi.
Gerçek Dünya Robotları İçin Neden Önemli
Basitçe söylemek gerekirse, bu çalışma geniş kapsamlı aramayı dikkatli yerel ayarlama ile birleştirmenin, donanım veya düşük düzey motorları değiştirmeden robot kolunun bir hattı daha sadık şekilde izlemesini sağlayabileceğini gösteriyor. Küçük geometrik farkların önemli olabileceği cerrahi dikiş veya hassas montaj gibi görevler için üç aşamalı hibrit daha doğru bir seçenek sunarken, klasik SQP hızın öncelikli olduğu durumlarda iyi bir tercih olmaya devam ediyor. Bu çalışma, zorlayıcı robotik uygulamalarda hareket planlama yöntemlerini seçip geliştirmeye yardımcı olan ortak bir kıstas görevi görüyor.
Atıf: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Anahtar kelimeler: ters kinematik, robot kol kontrolü, cerrahi robotik, optimizasyon yöntemleri, trajektori izleme