Clear Sky Science · pt
Soluções otimizadas de cinemática inversa para um robô de 6 GDL
Robôs que se movem como uma mão firme
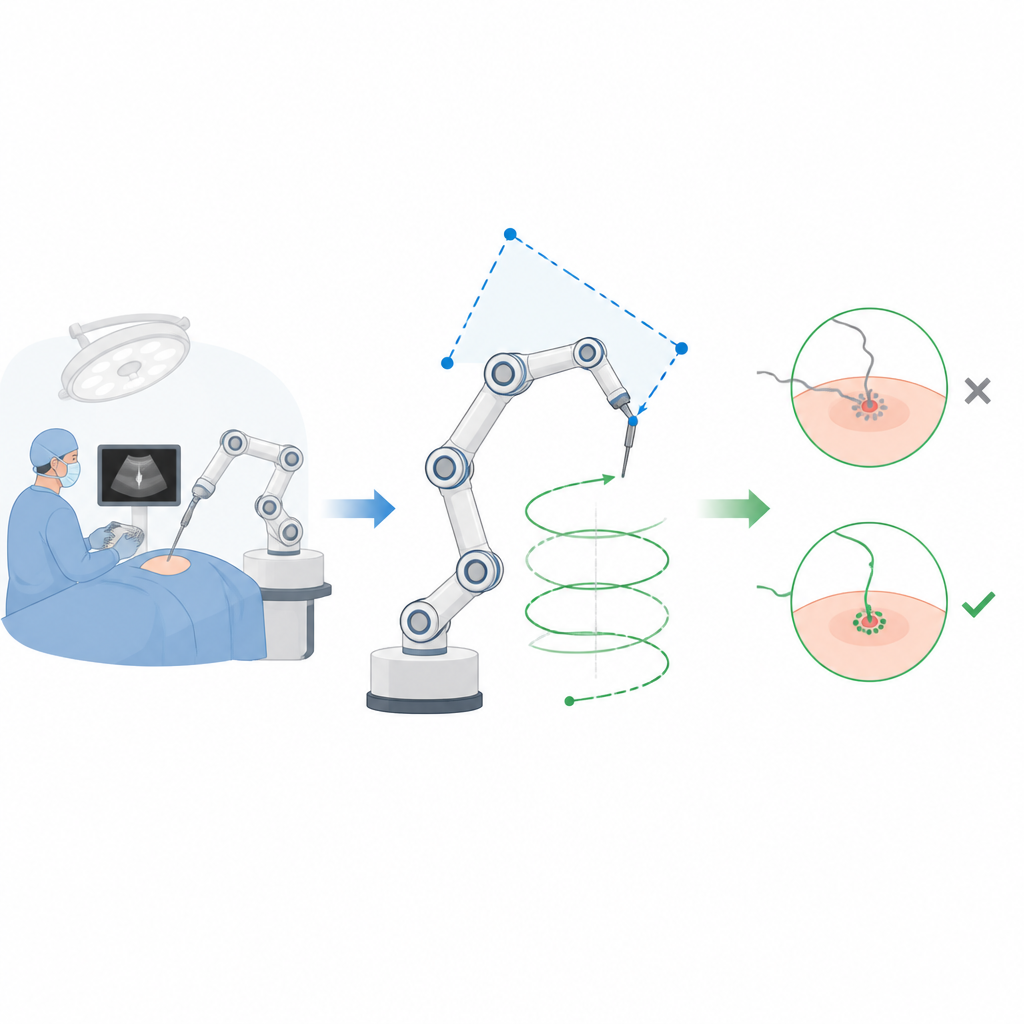
Quando um cirurgião usa um braço robótico para suturar tecido delicado, cada fração de milímetro conta. O robô precisa se mover rápida e suavemente ao longo de uma trajetória planejada, mesmo quando suas juntas estão em posições desconfortáveis. Este artigo explora como diferentes métodos computacionais podem dizer a um braço industrial de seis juntas exatamente como mover suas articulações para que a ponta siga uma linha desejada no espaço com a maior exatidão e confiabilidade possível.
Como os robôs decidem para que lado dobrar
Um braço robótico tem articulações como um braço humano, e um problema comum é chamado de cinemática inversa: dado onde você quer que a ponta do robô fique, quais ângulos cada junta deve adotar? Para robôs simples, os engenheiros podem escrever fórmulas exatas. Mas braços modernos usados em cirurgia ou fabricação frequentemente têm configurações complexas e limites rígidos nas juntas. Nesses casos, os engenheiros recorrem a métodos de busca numérica que testam diferentes combinações de juntas até encontrar uma que coloque a ponta próxima ao alvo, mantendo-se dentro de faixas seguras.
Por que atalhos clássicos nem sempre bastam
Solucionadores numéricos tradicionais são rápidos, mas agem um pouco como motoristas que só olham alguns metros à frente. O método conhecido como Programação Quadrática Sequencial (SQP) desliza rapidamente ladeira abaixo em uma paisagem matemática para encontrar uma solução próxima. Isso funciona bem quando a estimativa inicial já está perto de uma boa resposta, mas pode ficar preso em um vale ruim se o ponto de partida for azarado ou se o robô estiver próximo a uma configuração em que pequenas mudanças nas juntas causem grande movimento na ponta. Outras abordagens, como Otimização por Colônia de Formigas ou Branch and Bound, fazem buscas mais amplas por regiões promissoras, mas podem levar mais tempo de cálculo.
Reunindo estratégias de busca sob um mesmo teto
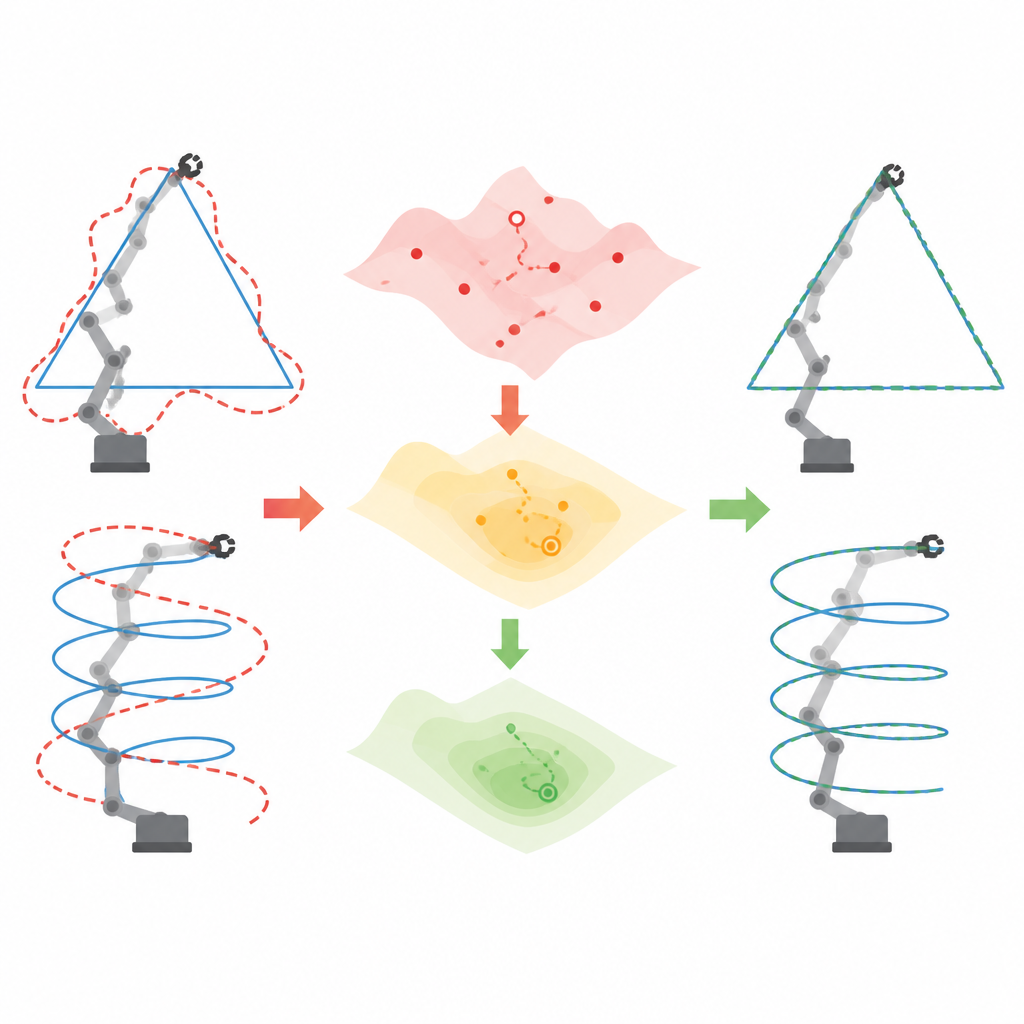
Os autores construíram uma única estrutura de teste em torno de um robô industrial de seis juntas chamado Viper 650s. Todo método estudado teve de resolver exatamente as mesmas tarefas usando o mesmo modelo do robô, os mesmos limites de juntas e as mesmas métricas de sucesso. Foram escolhidas duas trajetórias representativas: um triângulo plano e uma hélice tridimensional, cada uma definida por 51 pontos alvo. Para cada ponto ao longo dessas trajetórias, os métodos tiveram de calcular ângulos das juntas que colocassem a ponta do robô o mais próximo possível da posição e orientação desejadas, evitando posições ilegais das juntas e mantendo o movimento suave de um ponto ao seguinte.
Mixando busca global com ajuste fino
Seis estratégias de solução foram comparadas. Três eram métodos “autônomos”: o solucionador local rápido (SQP), uma busca por divisão de regiões (Branch and Bound) e uma busca inspirada em enxames (Otimização por Colônia de Formigas). As outras três eram híbridos que encadeavam essas ideias. Um usou a colônia de formigas para sugerir um bom ponto de partida para o SQP. Outro usou Branch and Bound para esculpir intervalos promissores de juntas antes de refinar com SQP. O projeto mais elaborado combinou os três estágios: as formigas primeiro exploraram todo o espaço das juntas para encontrar áreas promissoras, Branch and Bound então estreitou essas áreas em caixas mais apertadas, e por fim o SQP poliu o resultado até uma solução local precisa.
O que os testes revelaram
A equipe executou cada método 20 vezes tanto nas trajetórias do triângulo quanto da hélice e mediu dois resultados principais: quanto tempo levou para computar uma trajetória inteira e quão longe, em média, a trajetória executada pela ponta do robô se desviou da trajetória ideal. O método SQP simples foi consistentemente o mais rápido, tornando-o atraente quando o tempo de cálculo é a principal preocupação. No entanto, o híbrido em três estágios que mesclou busca de formigas, busca limitada e refinamento local produziu o menor erro médio de trajetória em ambas as rotas, reduzindo as devoções em cerca de um quarto em comparação com o SQP nas condições testadas, ao custo de mais tempo de computação.
Por que isso importa para robôs no mundo real
Em termos simples, este estudo mostra que combinar cuidadosamente busca de amplo alcance com ajuste local preciso pode fazer um braço robótico traçar uma linha com mais fidelidade, sem alterar seu hardware ou motores de baixo nível. Para tarefas como sutura cirúrgica ou montagem fina, onde pequenas diferenças geométricas podem ser importantes, o híbrido em três estágios oferece uma opção mais precisa, enquanto o SQP clássico continua sendo uma boa escolha quando a velocidade é prioridade. O trabalho serve como um referencial comum, ajudando engenheiros a escolher e refinar métodos de planejamento de movimento para aplicações robóticas exigentes.
Citação: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Palavras-chave: cinemática inversa, controle de braço robótico, robótica cirúrgica, métodos de otimização, rastreamento de trajetória